 2015-04-30
2015-04-30 2087
2087В настоящее время в качестве исполнительных двигателей переменного тока используются преимущественно асинхронные двигатели.
По конструкции асинхронные исполнительные двигатели являются двухфазными (рис. 4.1).
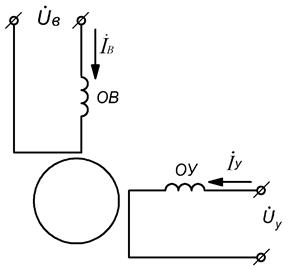
Рис. 4.1. Схема асинхронного исполнительного двигателя
Двигатели имеют на статоре две обмотки, сдвинутые в пространстве на 90 эл. Град., одна из которых при работе двигателя постоянно находится под напряжением и называется обмоткой возбуждения ОВ; на другую — обмотку управления ОУ — напряжение (сигнал) подается, лишь когда необходимо вращение ротора. От величины (или фазы) напряжения управления зависит развиваемый ротором вращающий момент, частота вращения, а следовательно, и мощность на валу.
Для работы асинхронных исполнительных двигателей необходимо вращающееся магнитное поле, образующееся при сдвиге токов (напряжений) обмоток возбуждения и управления по фазе во времени. Наилучшие энергетические показатели двигатели имеют при круговом вращающемся поле, которое получается при сдвиге токов в обмотках на четверть периода (900) и равенстве МДС обмоток.
Сдвиг токов (напряжений) в обмотках достигается: за счет специальных схем управления, применения фазовращателей и различных преобразователей или включения конденсаторов.
Регулирование частоты вращения асинхронных исполнительных двигателей — управление двигателями — на практике осуществляется одним из трех способов:
1) изменением величины (амплитуды) напряжения управления при неизменной его фазе — амплитудное управление;
2) изменением фазы напряжения управления при неизменной его, величине — фазовое управление;
3) одновременным изменением амплитуды напряжения управления и угла сдвига между векторами напряжений управления и возбуждения — амплитудно-фазовое управление.
Каждому способу управления соответствует своя схема включения исполнительного двигателя.
При амплитудном управлении (рис. 10.2, а) обмотка возбуждения ОВ подключается к сети с неизменным по величине напряжением  . На обмотку управления ОУ подается сигнал — напряжение управления
. На обмотку управления ОУ подается сигнал — напряжение управления  , сдвинутое схемой управления на 1/4 периода (900) относительно напряжения возбуждения
, сдвинутое схемой управления на 1/4 периода (900) относительно напряжения возбуждения  .
.
Величину напряжения управления , которое в процессе регулирования меняется по амплитуде, обычно оценивают эффективным коэффициентом сигнала  , равным отношению напряжения управления Uy к приведенному (к числу витков обмотки управления) напряжению возбуждения
, равным отношению напряжения управления Uy к приведенному (к числу витков обмотки управления) напряжению возбуждения  :
:
 (4.1)
(4.1)
где  — коэффициент трансформации — отношение эффективного числа витков обмоток возбуждения и управления (обычно kВ=kу).
— коэффициент трансформации — отношение эффективного числа витков обмоток возбуждения и управления (обычно kВ=kу).
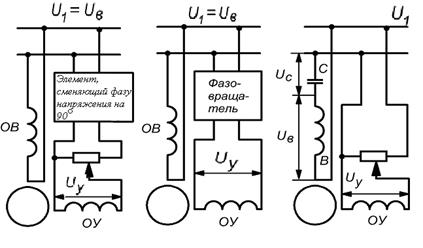
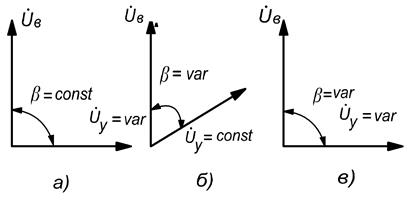
Рис. 4.2. Схемы управления асинхронными исполнительными двигателями
Круговое вращающееся поле при амплитудном управлении имеет место при αe =1, т. е. когда приведенные к одному числу витков напряжения управления и возбуждения равны по величине. Напряжение управления, соответствующее этому случаю, считается номинальным. При всех других напряжениях управления поле двигателя эллиптическое.
Реверс двигателя при амплитудном управлении достигается путем изменения фазы напряжения управления на полпериода (180°).
При фазовом управлении (рис. 4.2, б) на обмотку возбуждения, так же как и при амплитудном управлении, подается неизменное по величине напряжение сети . На обмотку управления подается постоянное по величине (амплитуде), но изменяющееся по фазе напряжение , равное приведенному напряжению возбуждения  .
.
Управление двигателем осуществляется путем изменения фазы напряжения управления — изменением угла β между векторами и . Величина сигнала управления обычно оценивается коэффициентом сигнала, за который в этом случае принимается sinβ.
При сдвиге и по фазе на 90° (sinβ =1) в двигателе, независимо от режима работы, имеет место круговое вращающееся поле. При коэффициентах сигнала sinβ, больших нуля, но меньших единицы (1> sinβ >0), поле двигателя становится эллиптическим; при sinβ=0 —пульсирующим; при sinβ <0 ротор двигателя изменяет направление вращения.
Амплитудно-фазовое управление асинхронными исполнительными двигателями в схемах автоматики может быть осуществлено двумя путями:
1) в схемах, где напряжение на обмотке возбуждения постоянно (), — путем одновременного изменения как по величине, так и по фазе напряжения на обмотке управления ;
2) в конденсаторных исполнительных двигателях — путем изменения по величине (амплитуде) напряжения управления .
Рассмотрим подробно второй случай, получивший наибольшее распространение.
В схемах автоматики, где напряжение управления совпадает по фазе с напряжением сети  , в которую включена обмотка возбуждения, для сдвига токов в обмотках во времени последовательно с обмоткой возбуждения ОВ обычно включают конденсатор С (рис. 4.2, в).
, в которую включена обмотка возбуждения, для сдвига токов в обмотках во времени последовательно с обмоткой возбуждения ОВ обычно включают конденсатор С (рис. 4.2, в).
В этом случае управление двигателем осуществляется путем изменения по амплитуде напряжения управления . С изменением по величине напряжения управления одновременно как по величине, так и по фазе изменяется напряжение непосредственно на обмотке возбуждения. Напряжение отличается от постоянного но величине и фазе напряжения сети на величину напряжения на конденсаторе  . Последнее равно произведению тока цепи возбуждения
. Последнее равно произведению тока цепи возбуждения  , изменяющегося при регулировании , на реактивное сопротивление конденсатора:
, изменяющегося при регулировании , на реактивное сопротивление конденсатора:
Конденсаторные исполнительные двигатели обычно рассчитывают так, чтобы при номинальном напряжении управления Uу . ном и номинальной емкости конденсатора С у них имело место круговое вращающееся поле в режиме пуска (при n2 =0). В этом случае напряжение Uy равно приведенному к числу витков обмотки управления напряжению и сдвинуто по фазе относительно его на 90°. При этом коэффициент сигнала управления считается номинальным:
 . (4.2)
. (4.2)
Особенностью конденсаторного исполнительного двигателя является то, что круговое вращающееся поле получается здесь только в одном режиме работы (режиме пуска) при определенном напряжении управления (Uу . ном ). Во всех других режимах и при всех других значениях Uy (кроме Uy =0) поле двигателя эллиптическое. При Uу =0 поле пульсирующее.
При всех способах управления частота вращения асинхронных исполнительных двигателей меняется за счет изменения (деформации) вращающегося магнитного поля. Если необходимо уменьшить частоту вращения, изменяют коэффициент сигнала и магнитное поле из кругового превращается в эллиптическое. При этом происходит уменьшение прямого поля — прямого вращающего момента — и увеличение обратного поля — обратного (тормозного) момента, что приводит к уменьшению частоты вращения.
Изменение характера магнитного поля путем изменения величины (или фазы) напряжения на обмотке управления позволяет регулировать частоту вращения как в режиме холостого хода, так и в режиме нагрузки, чего нельзя получить при одновременном изменении напряжений на обеих обмотках, так как в этом случае при отсутствии нагрузки частота вращения n2=n1=const. Недостаток используемого в асинхронных исполнительных двигателях метода регулирования частоты вращения — его малая экономичность, что объясняется большими электрическими потерями в статоре и роторе из-за наличия обратного поля.
В зависимости от конструкции ротора асинхронные исполнительные двигатели можно разделить на двигатели;
- с полым немагнитным ротором;
- с полым ферромагнитным ротором;
- с обычным ротором и короткозамкпутой обмоткой, выполненной в виде беличьей клетки.
К асинхронным исполнительным двигателям предъявляются примерно такие же требования, как и к исполнительным двигателям постоянного тока: у них должен отсутствовать самоход, они. должны иметь широкий диапазон регулирования частоты вращения, малую инерционность и линейность характеристик.

