 2015-05-05
2015-05-05 3834
3834Многие генераторы сами создают магнитное поле возбуждения (работают в режиме самовозбуждения). В генераторе с параллельным возбуждением, схема которого представлена на рис. 4, цепь возбуждения присоединена к зажимам якоря, причем предусмотрен последовательный реостат для изменения тока и, следовательно, напряжения генератора. Обмотка возбуждения состоит из большого числа витков сравнительно тонкой проволоки, так что ее сопротивление велико и ток возбуждения обычно не превышает 0,5–3% номинального выходного тока генератора. Генератор развивает свое напряжение от нуля за счет небольшого остаточного магнетизма в железной магнитной цепи. Якорь пересекает это слабое поле, и в обмотке возбуждения появляется слабый ток. Его направление таково, что создаваемое им слабое поле возбуждения добавляется к остаточному полю. В результате начинает увеличиваться наводимая ЭДС, снова увеличивается ток возбуждения, а с ним и магнитное поле. ЭДС начинает быстро нарастать, и ее рост ограничивается только реостатом в цепи возбуждения и магнитным насыщением железа.
39. Электромагнитный момент машины постоянного тока. Электромагнитная мощность.
согласно 1 з-ну Ньютона в применении к вращающемуся телу действующая на это тело движущая и тормозные вращающие м-ты уравновешивают др.др поэтому в генераторе при установившемся режиме работы эл-маг м-т Мэм=Мв-Мтр-Мс, где Мв - м-т на валу генератора развиваемый первичным двигателем, Мтр- м-т сил трения в подшипниках о воздух и на коллекторе ЭМ, Мс - тормозной м-т, вызываемый потерями на гистер.и вихревые токи в сердечнике якоря. Эти потери мощности появляются в рез-те вращения сердечника якоря в неподвижном магнитном поле полюсов. Возникающие при этом эл-маг силы оказывают на якорь тормозящее действие и в этом отношении проявляют себя подобно силам трения. В двигателе при устан.режиме работы Мэм=Мв+Мтр+Мс, где Мв - тормозной м-т на валу двигателя, развиваемый рабочей машиной. В генераторе Мэм является тормозным, а вдвигателе - вращающим м-ом, причем в обоих случаях Мв и Мэм противоположны по направлению. Развиваемая эл-маг м-ом Рэм- называется эл-маг мощностью и равна Рэм=Мэм2 пи n,(где 2 пи n представляет собой угловую скорость вращения). Если учесть, что линейная скорость на окружности якоря v=Pi*Da*n, тогда получим, что Рэм=2B*l*v*Ia, или Рэм=Еа*Ia. В обмотке якоря под действием ЭДС Еа и тока Ia развивается внутренняя эл мощность якоря Ра=Еа*Iа.получили, что внутренняя эл мощность якоря равна эл-маг мощности, развиваемой эл-маг м-ом, что отражает процесс преобразования мех.энергии в эл в генераторе и обратный процесс в двигателе. Для генератора имеем Ua*Ia=Ea*Ia-Ia^2*ra и для двигателя Ua*Ia=Ea*Ia+Ia^2*ra. Левые части этих выражений представляют собой эл мощности на зажимах якоря, первые члены правых частей- эл-маг мощность якоря и последние члены- эл потери мощности в якоре. Эти соотношения являются выражением з-на сохранения энергии и отражают процесс преобразования энергии в МПТ.
40. Условия самовозбуждения генератора.В генераторах с самовозбуждением, а к ним относится и генератор параллельного возбуждения, обмотки возбуждения получают питание непосредственно от якоря самого генератора, при этом посторонний источник питания им не требуется.Самовозбуждение генератора возможно при выполнении трех условий:1) наличие потока остаточного намагничивания полюсов Фост;2) согласное направление магнитного потока остаточного намагничивания и магнитного потока, создаваемого обмоткой возбуждения генератора;3) сопротивление цепи возбуждения rв должно быть ниже некоторого критического значения, а частота вращения должна быть не ниже номинального значения.В электрической машине практически всегда существует небольшой, порядка (2...5)% от номинального, поток остаточного намагничивания. Если в генераторе такой поток отсутствует, то необходимо его намагнитить, пропустив ток по обмотке возбуждения от постороннего источника.Если привести якорь генератора во вращение с частотой, равной номинальной, то под действием потока остаточного намагничивания в обмотке якоря возникает небольшая ЭДС Eост=сеnФост равная (2...5)% от Uн.Под действием этой ЭДС по цепи возбуждения потечет ток, который создает добавочный поток намагничивания Фдоб. Ток, создающий Фдоб, равен
 где rв=rрв+rшо; rрв — сопротивление регулировочного реостата; rшо — сопротивление параллельной обмотки возбуждения; rа — сопротивление цепи якоря.В зависимости от направления тока Iв в обмотке возбуждения поток Фдоб может быть направлен либо встречно относительно Фоcт, либо согласно с ним. При встречном направлении Фост и Фдоб процесс самовозбуждения идти не будет, т.к. не выполняется второе условие. В этом случае необходимо поменять направление тока Iв, переключив концы питания обмотки возбуждения. Если потоки направлены согласно, то развивается процесс самовозбуждения, который можно представить в виде следующий логической схемы
где rв=rрв+rшо; rрв — сопротивление регулировочного реостата; rшо — сопротивление параллельной обмотки возбуждения; rа — сопротивление цепи якоря.В зависимости от направления тока Iв в обмотке возбуждения поток Фдоб может быть направлен либо встречно относительно Фоcт, либо согласно с ним. При встречном направлении Фост и Фдоб процесс самовозбуждения идти не будет, т.к. не выполняется второе условие. В этом случае необходимо поменять направление тока Iв, переключив концы питания обмотки возбуждения. Если потоки направлены согласно, то развивается процесс самовозбуждения, который можно представить в виде следующий логической схемы
 При выполнении двух первых условий процесс самовозбуждения будет развиваться до определенного предела. Этот предел зависит от сопротивления цепи возбуждения rв, вида ее вольт-амперной характеристики и вида характеристики холостого хода. На рисунке-1., представлены характеристики холостого хода (1) при частоте вращения генератора n1, и (2) при частоте вращения n2 >n1, и вольтамперные характеристики цепи возбуждения генератора (3-6) при различных углах a.
При выполнении двух первых условий процесс самовозбуждения будет развиваться до определенного предела. Этот предел зависит от сопротивления цепи возбуждения rв, вида ее вольт-амперной характеристики и вида характеристики холостого хода. На рисунке-1., представлены характеристики холостого хода (1) при частоте вращения генератора n1, и (2) при частоте вращения n2 >n1, и вольтамперные характеристики цепи возбуждения генератора (3-6) при различных углах a.
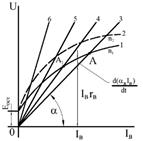
Рисунок-1 – Условия самовозбуждения генератора параллельного возбуждения
Определим предел, до которого идет процесс самовозбуждения. При этом считаем, что генератор работает на холостом ходу, т.е. I=0.
При самовозбуждении Iв≠const и следовательно уравнение ЭДС может быть написано в двух вариантах следующим образом
где Uв — напряжения возбуждения, равные изменяющемуся напряжению U на генераторе; Iв — ток возбуждения; rв — сопротивление цепи возбуждения; Lв — индуктивность цепи возбуждения.Так как rв=const, то напряжение Iвrв изменяется прямо пропорционально току Iв. Графически эта зависимость выражается прямой (3) (рисунок — 1), выходящей из начала координат под углом a, причем
 следовательно, каждому значению rв соответствует определенная характеристика цепи возбуждения, выходящая из начала координат под углом, определяемым формулой.При работе генератора на холостом ходу ток Iв мал, поэтому можно считать, что Iara≈0, тогда из уравнения равновесия ЭДС следует, что U=Ea и зависимость изменения напряжения на зажимах генератора определяется характеристикой холостого хода (кривая I). Отрезки ординат между кривой 1 и линией 3 дают разность
следовательно, каждому значению rв соответствует определенная характеристика цепи возбуждения, выходящая из начала координат под углом, определяемым формулой.При работе генератора на холостом ходу ток Iв мал, поэтому можно считать, что Iara≈0, тогда из уравнения равновесия ЭДС следует, что U=Ea и зависимость изменения напряжения на зажимах генератора определяется характеристикой холостого хода (кривая I). Отрезки ординат между кривой 1 и линией 3 дают разность
и служат мерой интенсивности происходящего процесса самовозбуждения, т.е. скорости изменения тока возбуждения. Очевидно, что этот процесс окончится тогда, когда разность
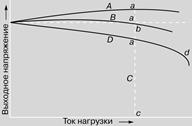
 станет равной нулю, т.е. установившееся значение тока Iв определяется точкой А пересечения характеристик 1 и 3.Если увеличить rв, то вольтамперная характеристика пойдет круче и примет положение 4. Процесс самовозбуждения в этом случае замедляется и заканчивается в точке А1 при меньшем напряжении на генераторе. При дальнейшем увеличении rв получим прямую 5, касательную к начальной части характеристики холостого хода. Значение rв, соответствующее прямой 5, называется критическим (rвкр). При сопротивлении цепи обмотки возбуждения, равной и большей rвкр (кривая 6) генератор практически не возбуждается.Если изменять частоту вращения генератора, то вид характеристики холостого хода меняется (кривая 2), следовательно, величина критического сопротивления rвкр зависит также от частоты вращения генератора. Большей частоте вращения генератора соответствует большее значение критического сопротивления rвкр.Генератор со смешанным возбуждением.При подключении нагрузки к генератору с параллельным возбуждением напряжение на его зажимах падает, в частности, из-за того, что нагрузка отбирает часть тока возбуждения. Такое понижение нежелательно по многим соображениям: это может приводить, например, к изменению яркости осветительных ламп и пр. Его можно исключить, добавив еще одну обмотку возбуждения, соединенную последовательно либо с нагрузкой (короткий шунт), либо с якорем (длинный шунт), как показано на рис. 5. Тогда ток нагрузки будет проходить через последовательную обмотку возбуждения и увеличивать магнитное поле. Степень компаундирования можно регулировать посредством переменного резистора с малым сопротивлением, шунтирующего последовательную обмотку возбуждения (рис. 5). Если напряжение в отсутствие нагрузки равно напряжению при номинальной нагрузке, то генератор называется плоско-компаундированным (кривая В на рис. 6); если напряжение под нагрузкой больше, чем в ее отсутствие, то он – перекомпаундированный (кривая А). Недокомпаундированные генераторы (кривая D) используются редко.
станет равной нулю, т.е. установившееся значение тока Iв определяется точкой А пересечения характеристик 1 и 3.Если увеличить rв, то вольтамперная характеристика пойдет круче и примет положение 4. Процесс самовозбуждения в этом случае замедляется и заканчивается в точке А1 при меньшем напряжении на генераторе. При дальнейшем увеличении rв получим прямую 5, касательную к начальной части характеристики холостого хода. Значение rв, соответствующее прямой 5, называется критическим (rвкр). При сопротивлении цепи обмотки возбуждения, равной и большей rвкр (кривая 6) генератор практически не возбуждается.Если изменять частоту вращения генератора, то вид характеристики холостого хода меняется (кривая 2), следовательно, величина критического сопротивления rвкр зависит также от частоты вращения генератора. Большей частоте вращения генератора соответствует большее значение критического сопротивления rвкр.Генератор со смешанным возбуждением.При подключении нагрузки к генератору с параллельным возбуждением напряжение на его зажимах падает, в частности, из-за того, что нагрузка отбирает часть тока возбуждения. Такое понижение нежелательно по многим соображениям: это может приводить, например, к изменению яркости осветительных ламп и пр. Его можно исключить, добавив еще одну обмотку возбуждения, соединенную последовательно либо с нагрузкой (короткий шунт), либо с якорем (длинный шунт), как показано на рис. 5. Тогда ток нагрузки будет проходить через последовательную обмотку возбуждения и увеличивать магнитное поле. Степень компаундирования можно регулировать посредством переменного резистора с малым сопротивлением, шунтирующего последовательную обмотку возбуждения (рис. 5). Если напряжение в отсутствие нагрузки равно напряжению при номинальной нагрузке, то генератор называется плоско-компаундированным (кривая В на рис. 6); если напряжение под нагрузкой больше, чем в ее отсутствие, то он – перекомпаундированный (кривая А). Недокомпаундированные генераторы (кривая D) используются редко. 
Применение.
Некогда генераторы постоянного тока были основными источниками электроэнергии в крупных городах, но затем их вытеснили генераторы переменного тока. В настоящее время их применяют в основном в сочетании с электродвигателями постоянного тока в промышленности и на транспорте.
41.работа синхронной машины в невозбужденном и перевозбужденном режимах, режим компенсатора Предположим, что при включении на параллельную работу изложенные в § 35-1 условия синхронизации возбужденного   генератора были соблюдены в точности, т. е. 0т = 0с или Е — = 0z = О. Тогда, согласно равенству (35-2), / = 0, т. е. машина не примет на себя никакой нагрузки. Предположим теперь, что ток возбуждения после синхронизации был увеличен и поэтому Ё > О. Тогда (рис. 35-5, а) возникает ток / [см. равенство (35-2)], отстающий от А(/, а также от Ё и О на 90°. Машина, таким образом, будет отдавать в сеть чисто индуктивный ток и реактивную мощность. Если ток возбуждения уменьшить, так что Ё < О (рис. 35-5, б), то ток / также будет отставать от Д# на 90°, но будет опережать Ё и Она 90°, т. е. машина будет отдавать в сеть емкостный ток и потреблять из сети реактивную мощность. Таким образом, изменение тока возбуждения синхронной машины вызовет в ней только реактивные токи или изменение реактивного тока и реактивной мощности. При Е > U синхронная машина называется перевозбужденной, а при Е < U — недовозбужденной. При равенстве активной мощности нулю перевозбужденная синхронная машина по отношению к сети эквивалентна емкости, а недовозбужденная — индуктивности. Синхронная машина, не несущая активной нагрузки и загруженная реактивным током, называется синхронным ком-пенсатортзм. Такие компенсаторы применяются для повышения коэффициента мощности и поддержания нормального уровня напряжения в сетях. Если, например, такой компенсатор установить в районе большой промышленной нагрузки и перевозбудить его, то он будет снабжать асинхронные двигатели промышленных предприятий реактивной мощностью, питающая сеть и генераторы электрических станций будут полностью или частично разгружены от этой мощности, коэффициент мощности генераторов и сети повысится, потери мощности и падения напряжения в них уменьшатся и напряжение сети у потребителей сохранится на нормальном уровне. генератора были соблюдены в точности, т. е. 0т = 0с или Е — = 0z = О. Тогда, согласно равенству (35-2), / = 0, т. е. машина не примет на себя никакой нагрузки. Предположим теперь, что ток возбуждения после синхронизации был увеличен и поэтому Ё > О. Тогда (рис. 35-5, а) возникает ток / [см. равенство (35-2)], отстающий от А(/, а также от Ё и О на 90°. Машина, таким образом, будет отдавать в сеть чисто индуктивный ток и реактивную мощность. Если ток возбуждения уменьшить, так что Ё < О (рис. 35-5, б), то ток / также будет отставать от Д# на 90°, но будет опережать Ё и Она 90°, т. е. машина будет отдавать в сеть емкостный ток и потреблять из сети реактивную мощность. Таким образом, изменение тока возбуждения синхронной машины вызовет в ней только реактивные токи или изменение реактивного тока и реактивной мощности. При Е > U синхронная машина называется перевозбужденной, а при Е < U — недовозбужденной. При равенстве активной мощности нулю перевозбужденная синхронная машина по отношению к сети эквивалентна емкости, а недовозбужденная — индуктивности. Синхронная машина, не несущая активной нагрузки и загруженная реактивным током, называется синхронным ком-пенсатортзм. Такие компенсаторы применяются для повышения коэффициента мощности и поддержания нормального уровня напряжения в сетях. Если, например, такой компенсатор установить в районе большой промышленной нагрузки и перевозбудить его, то он будет снабжать асинхронные двигатели промышленных предприятий реактивной мощностью, питающая сеть и генераторы электрических станций будут полностью или частично разгружены от этой мощности, коэффициент мощности генераторов и сети повысится, потери мощности и падения напряжения в них уменьшатся и напряжение сети у потребителей сохранится на нормальном уровне. |
42. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ СИНХРОННОГО ГЕНЕРАТОРА.Для оценки свойств синхронных генераторов используют те же характеристики, что и для генераторов постоянного тока. Только условия, при которых определяются внешняя и регулировочная характеристики, несколько дополняются . 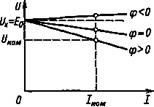 |
| Рис. 11.6. Внешние характеристики синхронного генератора |
 |
| Рис. 11.7. Регулировочные характеристики синхронного генератора |
1. Характеристика холостого хода. Основной магнитный поток синхронного генератора является функцией тока возбуждения, т. е. Ф0 (I в).
Если в (11.1) заменить f согласно (11.2), а магнитный поток записать как функцию тока возбуждения Ф0(I в), получим
| Е 0 = 4,44 kw | рn | Ф0(I в). |
(11.10)
Изменяя с помощью реостата r р (см. рис. 11.4) ток I в, можно менять тем самым поток Ф0 и, следовательно, ЭДС Е 0. Характеристика холостого хода синхронного генератора Е 0 (I в) не отличается от характеристики холостого хода генераторов постоянного тока (см. рис. 9.13) и определяется при тех же условиях, т. е. при I = 0 и n = const.
.2. Внешние характеристики. Как говорилось ранее, внешняя характеристика генератора независимого возбуждения U (I) определяется при следующих условиях: n = const и I в = const. Так как напряжение синхронного генератора зависит при прочих равных условиях еще от характера нагрузки, то дополнительным условием, при котором следует определять внешнюю характеристику синхронного генератора, должно быть постоянство коэффициента мощности, т. е. cos φ = const.
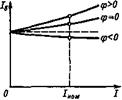
Внешние характеристики синхронного генератора при активной (φ = 0), активно-индуктивной (φ > 0) и активно-емкостной (φ < 0) нагрузках приведены на рис. 11.6. Они являются наглядной иллюстрацией того, что говорилось в § 11.4 о влиянии характера нагрузки на напряжение генератора.
Относительное изменение напряжения генератора, %, оценивают по формуле
| Δ u ном = | U х - U ном | 100 = | Δ U ном | 100, |
| U ном | U ном |
где U х — напряжение генератора при холостом ходе (I = 0), равное ЭДС; U ном — напряжение при номинальной нагрузке (I = I ном).
В случае наиболее часто встречающейся активно-индуктивной нагрузки при cos φ ≈ 0,8 относительное изменение напряжения Δ u ном у некоторых генераторов доходит до 35 — 45%.
3. Регулировочные характеристики. Естественно, что поскольку напряжение синхронного генератора изменяется при изменении нагрузки в значительных пределах, необходимо принимать меры для уменьшения изменения напряжения. Этого можно добиться, очевидно, за счет соответствующего изменения ЭДС генератора E 0 путем воздействия на его ток возбуждения I в. О том, как и в каких пределах необходимо изменять ток возбуждения при изменении тока нагрузки генератора, чтобы поддерживать U = const, и дают представление регулировочные характеристики (рис. 11.7).
Дополнительным условием, при котором должна определяться каждая из характеристик (кроме n = const), является cos φ = const.
Следует обратить внимание на то, что для нормальных условий работы приемников электрической энергии необходимо поддерживать напряжение и частоту синхронного генератора на заданных уровнях. Для этого синхронные генераторы снабжаются в большинстве случаев регуляторами, управляющими напряжением и частотой вращения генераторов и воздействующими на ток возбуждения генераторов и момент первичного двигателя.
43.Статическая устойчивость, перегружаемость синхронной машины. Угловая характеристика синхронной машины имеет важное значение для оценки статической устойчивости и степени перегружаемости. Под статической устойчивостью синхронной машины, работающей параллельно с сетью, понимают ее способность сохранять синхронное вращение (т. е. условие п 2 = п 1) при изменении внешнего вращающего или тормозного момента М вн, приложенного к ее валу. Статическая устойчивость обеспечивается только при углах θ, соответствующих М < Мmах. Допустим, что синхронный генератор работает при некотором внешнем моменте М вн, передаваемом его ротору от первичного двигателя. При этом ось полюсов ротора сдвинута на некоторый угол в относительно оси суммарного потока ΣФ и машина развивает электромагнитный момент М, который можно считать равным М вн (точки А и С на рис. 6.40, а).Если момент М вн возрастает, то ротор генератора ускоряется, что приводит к увеличению угла θ до значения θ + Δ θ. При работе машины в точке А возрастание угла в вызывает увеличение электромагнитного момента до значения М + Δ M (точка В); в результате равновесие моментов, действующих на вал ротора, восстанавливается и машина после некоторого колебательного процесса продолжает работать с синхронной частотой вращения. Аналогичный процесс происходит и при уменьшении М вн; при этом соответственно уменьшаются угол θ и момент М, а следовательно, равновесие моментов также восстанавливается. Однако если машина работает при π/2 < θ < π (точка С), то увеличение угла θ вызывает уменьшение электромагнитного момента до значения М - Δ М (точка D). В результате равновесие моментов, действующих на вал ротора, нарушается, ротор продолжает ускоряться, а угол в возрастать. Возрастание угла θ может привести к двум результатам: 1) машина переходит в точку устойчивой работы (аналогичную точке А) на последующих положительных полуволнах; 2) ротор по инерции проскакивает устойчивые положения, при этом происходит выпадение из синхронизма, т. е. ротор начинает вращаться с частотой, отличающейся от частоты вращения магнитного поля статора.
Выпадение из синхронизма является аварийным режимом, так как оно сопровождается прохождением по обмотке якоря больших токов. Это объясняется тем, что ЭДС генератора E и напряжение сети U c при указанном режиме могут складываться по контуру «генератор — сеть», а не вычитаться, как при нормальной работе. Если внешний момент по какой-либо причине снижается, то при работе машины в точке С угол θ уменьшается, электромагнитный момент возрастает, что приводит к дальнейшему уменьшению угла θ и переходу к работе в устойчивой точке А. Из рассмотрения рис. 6.40, а следует, что синхронная машина работает устойчиво, если dM/dθ > 0, и неустойчиво, если dM/dθ < 0; При работе синхронные машины могут подвергаться кратковременным перегрузкам. Кроме того, вследствие уменьшения напряжения, например, при коротких замыканиях в сети максимальная мощность Рт, которую способна развивать машина, снижается [см. равенство (35-6) и др.]. Поэтому необходимо, чтобы машина имела достаточный запас мощности, т. е. чтобы значение Рт было достаточно велико.
Статическая перегружаемость синхронной машины кп характеризуется отношением Рт при U = £/„ и if — ifж к номинальной мощности Ря:
Статическая перегружае-мость явнополюсных машин также выражается равенствами (35-22) — (35-25), если в них вводится добавочный множитель k, который учитывает влияние второго члена равенства (35-4). Величина k при этом определяется графиком рис. 35-14, где Статическая перегружаемость как явнополюсных, так и неяв-нополюсных синхронных двигателей с cos фн = 0,9 (режим перевозбуждения), согласно ГОСТ 183—66, должна быть не менее ka = 1,65. Статическая перегружаемость гидрогенераторов, согласно ГОСТ 5616—72, должна быть не ниже kn = 1,7 | ||||||||||||||
44.Способы пуска синхронных двигателей В подавляющем большинстве случаев применяется асинхронный пуск синхронных двигателей Обычно синхронные двигатели имеют на своем валу возбудитель в виде генератора постоянного тока параллельного возбуждения (рис. 1). 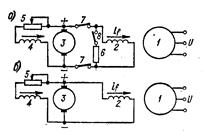 Рис1 1 при пуске по схеме рис. 1, а контакты 7 разомкнуты, а контакт 8 замкнут. При этом обмотка возбуждения двигателя 2 замкнута через сопротивление 6 и асинхронный пуск происходит в наиболее благоприятных условиях. В конце асинхронного пуска, при s = 0,05, срабатывает частотное реле, обмотка которого подключена к сопротивлению 6, и включает контактор цепи возбуждения. Контакты 7 контактора при этом замыкаются, а контакт 8 размыкается. В результате в обмотку 2 подается ток возбуждения и двигатель втягивается в синхронизм. Втягивание синхронного двигателя в синхронизм всегда обеспечено, если при асинхронном пуске скольжение в установившемся асинхронном режиме без возбуждения не превышает величины Рис1 1 при пуске по схеме рис. 1, а контакты 7 разомкнуты, а контакт 8 замкнут. При этом обмотка возбуждения двигателя 2 замкнута через сопротивление 6 и асинхронный пуск происходит в наиболее благоприятных условиях. В конце асинхронного пуска, при s = 0,05, срабатывает частотное реле, обмотка которого подключена к сопротивлению 6, и включает контактор цепи возбуждения. Контакты 7 контактора при этом замыкаются, а контакт 8 размыкается. В результате в обмотку 2 подается ток возбуждения и двигатель втягивается в синхронизм. Втягивание синхронного двигателя в синхронизм всегда обеспечено, если при асинхронном пуске скольжение в установившемся асинхронном режиме без возбуждения не превышает величины  где km — кратность максимального момента в синхронном режиме при номинальном токе возбуждения ifн; Рн — номинальная мощность, кет;ifс — ток возбуждения при синхронизации; GD2 — маховой момент двигателя и соединенного с ним механизма, nн — номинальная скорость вращения двигателя, об/мин. Пуск по схеме рис. 1 а отличается определенной сложностью. Поэтому в последнее время все чаще применяется схема рис.1 б с наглухо присоединенным возбудителем. При этом по цепи якоря 3 при пуске протекает переменный ток, который, однако, не причиняет вреда. При п = (0,6 — 0,7) nн возбудитель возбуждается и возбуждает синхронный двигатель, благодаря чему при приближении к синхронной скорости двигатель втягивается в синхронизм. Пуск по схеме рис.1 б происходит в менее благоприятных условиях. Во-первых, двигатель возбуждается слишком рано и при этом возникает дополнительный тормозящий момент на валу Мk. Во-вторых, в данном случае по сравнению со схемой рис. 1, а кривая асинхронного момента имеет менее благоприятный вид. Тем не менее, схема рис. 1, б обеспечивает надежное втягивание двигателя в синхронизм, если момент нагрузки на валу не превышает (0,4 — 0,5) Mн. Путем совершенствования пусковой обмотки двигателя можно достичь надежного втягивания в синхронизм. Пуск по схеме рис. 1, б по своей простоте приближается к пуску короткозамкнутого асинхронного двигателя и поэтому находит в последние годы все более широкое применение. Обычно производится прямой асинхронный пуск синхронных двигателей путем включения на полное напряжение сети. При тяжелых условиях пуска (большие падения напряжения в сети и опасность перегрева пусковой обмотки или массивного ротора) производится реакторный или автотрансформаторный пуск при пониженном напряжении, как и у короткозамкнутых асинхронных двигателей На рис. 2 показаны кривые изменения токов обмоток якоря I и возбуждения if, а также напряжения ^ U и скорости вращения п при прямом асинхронном пуске мощного двигателя (Рн = 1500 кет, Uн= 6,0 кв, nн = 1000 об/мин) с наглухо приключенным возбудителем на холостом ходу. При п = 500 об/мин в кривой if, заметен небольшой провал, обусловленный одноосным эффектом. Двигатель втянулся в синхронизм через 11 сек под воздействием реактивного момента. Кроме асинхронного пуска, в отдельных случаях возможны также некоторые другие способы пуска. Например, иногда можно привести синхронный двигатель во вращение на холостом ходу с помощью соединенной с ним машины (например, в агрегатах «синхронный двигатель — генератор постоянного тока»). При этом можно применить те же способы синхронизации с сетью, как и для синхронных генераторов. В некоторых случаях возможен частотный пуск, когда двигатель питается от отдельного синхронного генератора и частота последнего плавно поднимается от нуля. При этом синхронный двигатель приходит в синхронное вращение уже при весьма малой скорости. Обмотки возбуждения генератора и двигателя в этом случае необходимо питать от посторонних источников. Частотный пуск происходит наиболее благоприятно при условии, когда ток возбуждения генератора в начале пуска примерно равен номинальному, а ток возбуждения двигателя равен о характеристике холостого хода току возбуждения при U = Uн и п = nн В последние годы внедряются системы возбуждения синхронных двигателей с питанием обмотки возбуждения от сети переменного тока через полупроводниковые выпрямители. где km — кратность максимального момента в синхронном режиме при номинальном токе возбуждения ifн; Рн — номинальная мощность, кет;ifс — ток возбуждения при синхронизации; GD2 — маховой момент двигателя и соединенного с ним механизма, nн — номинальная скорость вращения двигателя, об/мин. Пуск по схеме рис. 1 а отличается определенной сложностью. Поэтому в последнее время все чаще применяется схема рис.1 б с наглухо присоединенным возбудителем. При этом по цепи якоря 3 при пуске протекает переменный ток, который, однако, не причиняет вреда. При п = (0,6 — 0,7) nн возбудитель возбуждается и возбуждает синхронный двигатель, благодаря чему при приближении к синхронной скорости двигатель втягивается в синхронизм. Пуск по схеме рис.1 б происходит в менее благоприятных условиях. Во-первых, двигатель возбуждается слишком рано и при этом возникает дополнительный тормозящий момент на валу Мk. Во-вторых, в данном случае по сравнению со схемой рис. 1, а кривая асинхронного момента имеет менее благоприятный вид. Тем не менее, схема рис. 1, б обеспечивает надежное втягивание двигателя в синхронизм, если момент нагрузки на валу не превышает (0,4 — 0,5) Mн. Путем совершенствования пусковой обмотки двигателя можно достичь надежного втягивания в синхронизм. Пуск по схеме рис. 1, б по своей простоте приближается к пуску короткозамкнутого асинхронного двигателя и поэтому находит в последние годы все более широкое применение. Обычно производится прямой асинхронный пуск синхронных двигателей путем включения на полное напряжение сети. При тяжелых условиях пуска (большие падения напряжения в сети и опасность перегрева пусковой обмотки или массивного ротора) производится реакторный или автотрансформаторный пуск при пониженном напряжении, как и у короткозамкнутых асинхронных двигателей На рис. 2 показаны кривые изменения токов обмоток якоря I и возбуждения if, а также напряжения ^ U и скорости вращения п при прямом асинхронном пуске мощного двигателя (Рн = 1500 кет, Uн= 6,0 кв, nн = 1000 об/мин) с наглухо приключенным возбудителем на холостом ходу. При п = 500 об/мин в кривой if, заметен небольшой провал, обусловленный одноосным эффектом. Двигатель втянулся в синхронизм через 11 сек под воздействием реактивного момента. Кроме асинхронного пуска, в отдельных случаях возможны также некоторые другие способы пуска. Например, иногда можно привести синхронный двигатель во вращение на холостом ходу с помощью соединенной с ним машины (например, в агрегатах «синхронный двигатель — генератор постоянного тока»). При этом можно применить те же способы синхронизации с сетью, как и для синхронных генераторов. В некоторых случаях возможен частотный пуск, когда двигатель питается от отдельного синхронного генератора и частота последнего плавно поднимается от нуля. При этом синхронный двигатель приходит в синхронное вращение уже при весьма малой скорости. Обмотки возбуждения генератора и двигателя в этом случае необходимо питать от посторонних источников. Частотный пуск происходит наиболее благоприятно при условии, когда ток возбуждения генератора в начале пуска примерно равен номинальному, а ток возбуждения двигателя равен о характеристике холостого хода току возбуждения при U = Uн и п = nн В последние годы внедряются системы возбуждения синхронных двигателей с питанием обмотки возбуждения от сети переменного тока через полупроводниковые выпрямители. 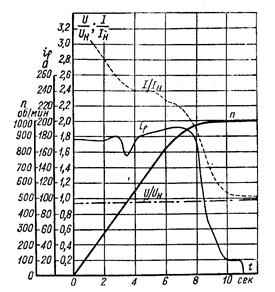 Рис 2. Рис 2. | ||||||||||||||
45.устройство и принцип действия синхронной машины Синхронная машина — это электрическая машина переменного тока, частота вращения ротора которой равна частоте вращения магнитного поля в воздушном зазоре. Устройство. Основными частями синхронной машины являются якорь и индуктор. Наиболее частым исполнением является такое, при котором якорь располагается на статоре, а на отделённом от него воздушным зазором роторе находится индуктор. Якорь представляет собой одну или несколько обмоток переменного тока. В двигателях токи, подаваемые в якорь, создают вращающееся магнитное поле, которое сцепляется с полем индуктора, и таким образом происходит преобразование энергии. Поле якоря оказывает воздействие на поле индуктора и называется поэтому также полем реакции якоря. В генераторах поле реакции якоря создаётся переменными токами, индуцируемыми в обмотке якоря от индуктора. Индуктор состоит из полюсов — электромагнитов постоянного тока или постоянных магнитов (в микромашинах). Индукторы синхронных машин имеют две различные конструкции: явнополюсную или неявнополюсную. Явнополюсная машина отличается тем, что полюса ярко выражены и имеют конструкцию, схожую с полюсами машины постоянного тока. При неявнополюсной конструкции обмотка возбуждения укладывается в пазы сердечника индуктора, весьма похоже на обмотку роторов асинхронных машин с фазным ротором, с той лишь разницей, что между полюсами оставляется место, незаполненное проводниками (так называемый большой зуб). Неявнополюсные конструкции применяются в быстроходных машинах, чтобы уменьшить механическую нагрузку на полюса. Для уменьшения магнитного сопротивления, то есть для улучшения прохождения магнитного потока применяются ферромагнитные сердечники ротора и статора. В основном они представляют собой шихтованную конструкцию из электротехнической стали (то есть набранную из отдельных листов). Электротехническая сталь обладает рядом интересных свойств. В том числе она имеет повышенное содержание кремния, чтобы повысить её электрическое сопротивление и уменьшить тем самым вихревые токи Принцип действия. Двигательный принцип Принцип действия синхронного двигателя основан на взаимодействии вращающегося магнитного по ля якоря и магнитного поля полюсов индуктора. Обычно якорь расположен на статоре, а индуктор — на роторе. В мощных двигателях в качестве полюсов используются электромагниты (ток на ротор подаётся через скользящий контакт щетка - кольцо), в маломощных — постоянные магниты. Существует обращённая конструкция двигателей, в которой якорь расположен на роторе, а индуктор — на статоре (в устаревших двигателях, а также в современных криогенных синхронных машинах, в которых в обмотках возбуждения используются сверхпроводники.) Запуск двигателя. Двигатель требует разгона до частоты, близкой к частоте вращения магнитного поля в зазоре, прежде чем сможет работать в синхронном режиме. При такой скорости вращающееся магнитное поле якоря сцепляется с магнитными полями полюсов индуктора (если индуктор расположен на статоре, то получается, что вращающееся магнитное поле вращающегося якоря (ротора) неподвижно относительно постоянного поля индуктора (статора), если индуктор на роторе, то магнитное поле вращающихся полюсов индуктора (ротора) неподвижно относительно вращающегося магнитного поля якоря (статора)) — это явление называется «вход в синхронизм». Для разгона обычно используется асинхронный режим, при котором обмотки индуктора замыкаются через реостат или накоротко, как в асинхронной машине, для такого режима запуска в машинах на роторе делается короткозамкнутая обмотка, которая также выполняет роль успокоительной обмотки, устраняющей "раскачивание" ротора при синхронизации. После выхода на скорость близкую к номинальной (>95%) индуктор запитывают постоянным током. В двигателях с постоянными магнитами применяется внешний разгонный двигатель. Часто на валу ставят небольшой генератор постоянного тока, который питает электромагниты. Также используется частотный пуск, когда частоту тока якоря постепенно увеличивают от 0 до номинальной величины. Или наоборот, когда частоту индуктора понижают от номинальной до 0, т.е. до постоянного тока. Частота вращения ротора  [об/мин] остаётся неизменной, жёстко связанной с частотой сети [об/мин] остаётся неизменной, жёстко связанной с частотой сети  [Гц] соотношением: [Гц] соотношением:  где где  — число пар полюсов ротора. Синхронные двигатели при изменении возбуждения меняют импеданс с емкостного на индуктивный. Перевозбуждённые СД на холостом ходу применяют в качестве компенсаторов реактивной мощности. Синхронные двигатели в промышленности обычно применяют при единичных мощностях свыше 300 кВт, при меньших мощностях обычно применяется более простой (и надежный) асинхронный двигатель с короткозамкнутым ротором. Генераторный режим Обычно синхронные генераторы выполняют с якорем, расположенным на статоре, для удобства отвода электрической энергии. Поскольку мощность возбуждения невелика по сравнению с мощностью, снимаемой с якоря (0,3...2%), подвод постоянного тока к обмотке возбуждения с помощью двух контактных колец не вызывает особых затруднений. Принцип действия синхронного генератора основан на явлении электромагнитной индукции; при вращении ротора магнитный поток, создаваемый обмоткой возбуждения, сцепляется поочередно с каждой из фаз обмотки статора, индуцируя в них ЭДС. В наиболее распространенном случае применения трехфазной распределенной обмотки якоря в каждой из фаз, смещенных друг относительно друга на 120 градусов, индуцируется синусоидальная ЭДС. Соединяя фазы по стандартным схемам «треугольник» или «звезда», на выходе генератора получают трехфазное напряжение, являющееся общепринятым стандартом для магистральных электросетей. Частота индуцируемой ЭДС [Гц] связана с частотой вращения ротора [об/мин] соотношением: — число пар полюсов ротора. Синхронные двигатели при изменении возбуждения меняют импеданс с емкостного на индуктивный. Перевозбуждённые СД на холостом ходу применяют в качестве компенсаторов реактивной мощности. Синхронные двигатели в промышленности обычно применяют при единичных мощностях свыше 300 кВт, при меньших мощностях обычно применяется более простой (и надежный) асинхронный двигатель с короткозамкнутым ротором. Генераторный режим Обычно синхронные генераторы выполняют с якорем, расположенным на статоре, для удобства отвода электрической энергии. Поскольку мощность возбуждения невелика по сравнению с мощностью, снимаемой с якоря (0,3...2%), подвод постоянного тока к обмотке возбуждения с помощью двух контактных колец не вызывает особых затруднений. Принцип действия синхронного генератора основан на явлении электромагнитной индукции; при вращении ротора магнитный поток, создаваемый обмоткой возбуждения, сцепляется поочередно с каждой из фаз обмотки статора, индуцируя в них ЭДС. В наиболее распространенном случае применения трехфазной распределенной обмотки якоря в каждой из фаз, смещенных друг относительно друга на 120 градусов, индуцируется синусоидальная ЭДС. Соединяя фазы по стандартным схемам «треугольник» или «звезда», на выходе генератора получают трехфазное напряжение, являющееся общепринятым стандартом для магистральных электросетей. Частота индуцируемой ЭДС [Гц] связана с частотой вращения ротора [об/мин] соотношением:  где где  — число пар полюсов ротора. Часто синхронные генераторы используют вместо коллекторных машин для генерации постоянного тока, подключая их обмотки якоря к трехфазным выпрямителям. — число пар полюсов ротора. Часто синхронные генераторы используют вместо коллекторных машин для генерации постоянного тока, подключая их обмотки якоря к трехфазным выпрямителям. | ||||||||||||||
46.уравнение напряжения и векторные диаграммы синхронного генератора при индуктивно-активной нагрузке Векторную диаграмму строят в соответствии с уравнением  .. Если нагрузка генератора активно-индуктивная, то вектор тока статора I отстает по фазе на угол .. Если нагрузка генератора активно-индуктивная, то вектор тока статора I отстает по фазе на угол  от вектора напряжения U, а вектор индуктивного падения напряжения от вектора напряжения U, а вектор индуктивного падения напряжения  опережает вектор тока на угол опережает вектор тока на угол  (рис. 4.10,а). Сумма векторов U и (рис. 4.10,а). Сумма векторов U и  дает вектор ЭДС дает вектор ЭДС  . Угол . Угол  между векторами между векторами  и U называют углом нагрузки, а угол между векторами и U называют углом нагрузки, а угол между векторами  и I обозначается и I обозначается  . ЭДС соответствует магнитный поток ротора . ЭДС соответствует магнитный поток ротора  , а напряжению U – результирующий магнитный поток машины , а напряжению U – результирующий магнитный поток машины  (рис. 4.9,б). В генераторном режиме поток (рис. 4.9,б). В генераторном режиме поток  опережает поток опережает поток  на угол на угол  , чему соответствует сдвиг на тот же угол полюса ротора , чему соответствует сдвиг на тот же угол полюса ротора  относительно полюса N и результирующего поля машины. Силовые линии магнитного поля между полюсами показаны тонкими сплошными линиями. В генераторном режиме в результате взаимодействия полюсов относительно полюса N и результирующего поля машины. Силовые линии магнитного поля между полюсами показаны тонкими сплошными линиями. В генераторном режиме в результате взаимодействия полюсов  и N образуется противодействующий момент и N образуется противодействующий момент  . .  | ||||||||||||||
47.регулирование скорости вращения синхронных двигателей Принципы регулирования. Частота вращения синхронного двигателя п2 равна частоте вращающегося магнитного поля n1 = 60f1/p. Следовательно, ее можно регулировать путем изменения частоты питающего напряжения или числа полюсов 2р. Регулировать частоту вращения путем изменения числа полюсов в синхронном двигателе нецелесообразно, так как в отличие от асинхронного здесь требуется изменять число полюсов как на статоре, так и на роторе, что приводит к значительному усложнению конструкции ротора. Поэтому практически используют лишь изменение частоты питающего напряжения. К синхронному двигателю применимы все основные положения теории частотного регулирования асинхронного двигателя, в том числе необходимость одновременного изменения как частоты, так и питающего напряжения. Однако в чистом виде частотное регулирование частоты вращения синхронных двигателей применяется только при очень малых мощностях, когда нагрузочные моменты невелики, а инерция приводного механизма мала. При больших мощностях такие условия имеются только в некоторых типах электроприводов, например в электроприводах вентиляторов.Для синхронных двигателей, применяемых в электроприводах с большим моментом инерции приводного механизма, необходимо очень плавно изменять частоту питающего напряжения, чтобы двигатель не выпал из синхронизма. Особенно сложным является пуск в ход двигателя, когда начальная частота должна составлять доли герца, а затем постепенно повышаться до максимального значения. Для таких электроприводов наиболее пригодным является метод частотного регулирования с самосинхронизацией, при котором двигатель в принципе не может выпасть из синхронизма. Частотное регулирование без самосинхронизации. Электромагнитный момент синхронного двигателя М = см IаФв cos ψ = см IаФв cos (φ + θ). При частотном регулировании обычно стремятся получить режим работы двигателя с cos φ = 1, когда в обмотке якоря имеются минимальные потери энергии. Для этого ток якоря Iа должен поддерживаться постоянным и минимальным: Iаmin = М/(смФв cos θ). Из (6.49) следует, что при неизменных нагрузочном моменте (Мн = М = const) и потоке возбуждения (Фв = const), т. е. токе возбуждения (Iв = const), угол θ в процессе регулирования частоты не должен изменяться. Однако при изменении частоты f1 изменяются ЭДС Е0, угловая скорость ротора ω1 и индуктивное сопротивление Хсн (или сопротивления Хd и Xq при явно-полюсном роторе), т. е. Е0/Е0ном = Хсн /Хсн.ном = ω1/ω1ном =f1/f1ном. Поэтому при частотах питающего напряжения f1, отличных от номинальной частоты f1ном, формула электромагнитного момента [см. (6.35)] принимает вид
где С = mЕ0ном f1ном /(ω1ном Хсн.ном) - постоянная. Из (6.51) следует, что при неизменных значениях нагрузочного момента Мн = М и тока якоря Iа = Iамин необходимо выдерживать условие U/f1 = const, т. е. изменять напряжение U, подаваемое к электродвигателю от преобразователя частоты, пропорционально изменению частоты f1. При соблюдении условия (6.52) все стороны треугольника ОАВ (рис. 6.50, а) изменяются пропорционально частоте, а угол 0 остается неизменным. При изменении нагрузки необходимо в соответствии с (6.48) изменять поток возбуждения Фв, т. е. ток возбуждения Iв.
| ||||||||||||||
48. Работа синхронного генератора на автономную нагрузку. Синхронные генераторы работают в автономном режиме (рис. 4.4, б) в тех случаях, когда промышленная электрическая сеть имеет недостаточную мощность или вообще отсутствует, например, на удалённых строительных площадках, нефтяных и газовых промыслах, лесозаготовительных пунктах, морских и речных судах, летательных аппаратах и т.п. Напряжение на выводах автономно работающего синхронного генератора U в большой степени зависит от нагрузки и её характера. Зависимость U(I) при n 0=const, I в=const и cos φ = const называется внешней характеристикой генератора. Семейство внешних характеристик синхронного генератора при различных cos  изображено на рис. 4.10. Характеристики показывают, что напряжение генератора при активно – индуктивной нагрузке ( изображено на рис. 4.10. Характеристики показывают, что напряжение генератора при активно – индуктивной нагрузке ( >0) довольно резко падает, что объясняется размагничивающим действием реакции якоря, а при активно–ёмкостной нагрузке ( <0) изменяется незначительно и даже может увеличиваться, что связано с намагничивающим действием реакции якоря при этой нагрузке. При эксплуатации генератора стабилизацию напряжения осуществляют регуляторами возбуждения, которые при увеличении тока нагрузки I увеличивают поток ротора Ф0, а следовательно, и ЭДС Е 0 за счёт увеличения тока I в возбуждения ротора. >0) довольно резко падает, что объясняется размагничивающим действием реакции якоря, а при активно–ёмкостной нагрузке ( <0) изменяется незначительно и даже может увеличиваться, что связано с намагничивающим действием реакции якоря при этой нагрузке. При эксплуатации генератора стабилизацию напряжения осуществляют регуляторами возбуждения, которые при увеличении тока нагрузки I увеличивают поток ротора Ф0, а следовательно, и ЭДС Е 0 за счёт увеличения тока I в возбуждения ротора.  | ||||||||||||||
49.колебания синхронной машины. гашение колебаний.При колебаниях или качаниях синхронной машины ее ротор вращается неравномерно и скорость его колеблется с некоторой частотой около среднего значения.Наибольший практический интерес представляет случай, когда машина работает параллельно с мощной сетью, частоту /х тока которой можно считать постоянной. В этом случае колебания угловой скорости ротора Q, происходят около синхронной угловой скорости Одновременно с колебаниями Q происходят также колебания угла нагрузки S.  Рис. •39-1. Векторы э. д. с. и напряжения синхронного генератора при колебаниях Рис. •39-1. Векторы э. д. с. и напряжения синхронного генератора при колебаниях 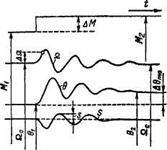 Рис. 39-2. Колебания угловой скорости Й, угла нагрузки в и скольжения s синхронного генератора при внезапном изменении вращающего момента на валу М Действительно, при# п > Qc ротор забегает вперед и угол 8 между векторами Ё и 0 при работе в режиме генератора увеличивается (рис. 39-1), а при U <Z Qc уменьшается. Колебания угла е в свою очередь неразрывно связаны, как следует из векторных диаграмм, с колебаниями величин мощности Р и тока якоря /. Поэтому внешне колебания синхронной машины проявляются в колебаниях стрелок ваттметров и амперметров. Чем больше амплитуда колебаний. Q и е, тем больше также колебания Р и /. Если мощность сети мала, то возникают также колебания величины напряжения U. При й =fc Qc ротор вращается с некоторым скольжением s относительно магнитного поля статора, и поэтому при колебаниях синхронной машины колеблется также величина s. На рис. 39-2 представлены кривые затухающих колебаний Q, 6 и s. Индексы 1 Рис. 39-2. Колебания угловой скорости Й, угла нагрузки в и скольжения s синхронного генератора при внезапном изменении вращающего момента на валу М Действительно, при# п > Qc ротор забегает вперед и угол 8 между векторами Ё и 0 при работе в режиме генератора увеличивается (рис. 39-1), а при U <Z Qc уменьшается. Колебания угла е в свою очередь неразрывно связаны, как следует из векторных диаграмм, с колебаниями величин мощности Р и тока якоря /. Поэтому внешне колебания синхронной машины проявляются в колебаниях стрелок ваттметров и амперметров. Чем больше амплитуда колебаний. Q и е, тем больше также колебания Р и /. Если мощность сети мала, то возникают также колебания величины напряжения U. При й =fc Qc ротор вращается с некоторым скольжением s относительно магнитного поля статора, и поэтому при колебаниях синхронной машины колеблется также величина s. На рис. 39-2 представлены кривые затухающих колебаний Q, 6 и s. Индексы 1  относятся к исходному режиму, до начала колебаний, а индексы 2 — к последующему режиму, после затухания колебаний. В ряде случаев возникают весьма сильные колебания синхронных машин, которые серьезным образом нарушают их нормальную работу, а также работу энергосистемы в целом. При колебаниях в синхронных машинах происходят сложные переходные процессы, которые ниже рассматриваются лишь в основных чертах и преимущественно с физической точки зрения. Колебания синхронных машин бывают вынужденные и свободные. Вынужденные колебания синхронной машины возникают в случаях, когда механический момент на валу непостоянен и содержит пульсирующие составляющие. Чаще всего это бывает при соединении синхронных машин с поршневыми машинами (например, дизельный первичный двигатель у генератора и поршневой компрессор у двигателя). Вынужденные колебания становятся особенно сильными, нежелательными и опасными, когда их частота /в близка к частоте собственных или свободных колебаний /0 и поэтому возникают резонансные явления, а также когда в общую сеть включено несколько синхронных машин, имеющих вынужденные колебания с одинаковыми или кратными частотами. Например, иногда возникают затруднения при параллельной работе так называемых синхронных дизель-генераторов, первичными двигателями которых являются дизели. Для уменьшения вынужденных колебаний дизель-генераторы, а часто также двигатели поршневых компрессоров снабжаются маховиками. Маховики иногда присоединяются непосредственно к роторному колесу синхронной машины или ротор машины выполняется с повышенным маховым моментом (больший диаметр и вес). Дизель-генераторы имеют для уменьшения колебаний также успокоительные обмотки (о роли последних см. ниже). Свободные колебания присущи самой природе синхронной машины, так как она при параллельной работе с сетью или другими синхронными машинами представляет собой колебательную систему. Такие колебания возникают при любых внезапных или резких нарушениях или изменениях режима работы синхронной машины (наброс или сброс нагрузки, падение напряжения на зажимах, изменение тока возбуждения и пр.). Изображенные На рис. 39-2 колебания возникают; например, при внезапном увеличении вращающего момента первичного двигателя, как это показано в верхней части рисунка. В этом случае угол нагрузки генератора возрастает от 9i до 62> и этот переход совершается путем колебаний с начальной амплитудой колебаний угла нагрузки, равной |Лбт0 = б2 —■ Ь\. Свободные колебания присущи многим физическим объектам, причем их природа и характер у разнородных объектов во многом одинаковы и колебания этих объектов описываются аналогичными дифференциальными уравнениями. Колебания ротора синхронной машины являются механическими. Такие колебания возникают в механических системах, в которых действуют упругие и инерционные силы, при всяких возмущениях, выводящих эту систему из положения равновесия. Упругие силы, стремящиеся вернуть колеблющуюся систему в положение равновесия, зависят от величины отклонения системы от положения равновесия и в простейшем случае пропорциональны этому отклонению. В положении равновесия эти силы равны нулю. При свободных колебаниях синхронной машины действуют совершенно аналогичные силы или, вернее, вращающие моменты, поскольку в данном случае происходят колебания вращающегося тела — ротора синхронной машины. Упругим силам в данном случае соответствует электромагнитный момент, действующий на ротор и зависящий от угла нагрузки 6. Деформация магнитного поля в зазоре при изменении угла нагрузки (см. рис. 35-6) аналогична деформации пружины и вызывает изменение электромагнитного момента. В этом отношении линии магнитной индукции уподобляются упругим нитям, играющим роль пружины. Инерционным-еилам соответствует инерционный, или динамический, вращающий момент ротора, возникающий при наличии положительного или отрицательного углового ускорения ротора. Частота собственных колебаний синхронных машин /0 обычно составляет 0,5—2,0гц. относятся к исходному режиму, до начала колебаний, а индексы 2 — к последующему режиму, после затухания колебаний. В ряде случаев возникают весьма сильные колебания синхронных машин, которые серьезным образом нарушают их нормальную работу, а также работу энергосистемы в целом. При колебаниях в синхронных машинах происходят сложные переходные процессы, которые ниже рассматриваются лишь в основных чертах и преимущественно с физической точки зрения. Колебания синхронных машин бывают вынужденные и свободные. Вынужденные колебания синхронной машины возникают в случаях, когда механический момент на валу непостоянен и содержит пульсирующие составляющие. Чаще всего это бывает при соединении синхронных машин с поршневыми машинами (например, дизельный первичный двигатель у генератора и поршневой компрессор у двигателя). Вынужденные колебания становятся особенно сильными, нежелательными и опасными, когда их частота /в близка к частоте собственных или свободных колебаний /0 и поэтому возникают резонансные явления, а также когда в общую сеть включено несколько синхронных машин, имеющих вынужденные колебания с одинаковыми или кратными частотами. Например, иногда возникают затруднения при параллельной работе так называемых синхронных дизель-генераторов, первичными двигателями которых являются дизели. Для уменьшения вынужденных колебаний дизель-генераторы, а часто также двигатели поршневых компрессоров снабжаются маховиками. Маховики иногда присоединяются непосредственно к роторному колесу синхронной машины или ротор машины выполняется с повышенным маховым моментом (больший диаметр и вес). Дизель-генераторы имеют для уменьшения колебаний также успокоительные обмотки (о роли последних см. ниже). Свободные колебания присущи самой природе синхронной машины, так как она при параллельной работе с сетью или другими синхронными машинами представляет собой колебательную систему. Такие колебания возникают при любых внезапных или резких нарушениях или изменениях режима работы синхронной машины (наброс или сброс нагрузки, падение напряжения на зажимах, изменение тока возбуждения и пр.). Изображенные На рис. 39-2 колебания возникают; например, при внезапном увеличении вращающего момента первичного двигателя, как это показано в верхней части рисунка. В этом случае угол нагрузки генератора возрастает от 9i до 62> и этот переход совершается путем колебаний с начальной амплитудой колебаний угла нагрузки, равной |Лбт0 = б2 —■ Ь\. Свободные колебания присущи многим физическим объектам, причем их природа и характер у разнородных объектов во многом одинаковы и колебания этих объектов описываются аналогичными дифференциальными уравнениями. Колебания ротора синхронной машины являются механическими. Такие колебания возникают в механических системах, в которых действуют упругие и инерционные силы, при всяких возмущениях, выводящих эту систему из положения равновесия. Упругие силы, стремящиеся вернуть колеблющуюся систему в положение равновесия, зависят от величины отклонения системы от положения равновесия и в простейшем случае пропорциональны этому отклонению. В положении равновесия эти силы равны нулю. При свободных колебаниях синхронной машины действуют совершенно аналогичные силы или, вернее, вращающие моменты, поскольку в данном случае происходят колебания вращающегося тела — ротора синхронной машины. Упругим силам в данном случае соответствует электромагнитный момент, действующий на ротор и зависящий от угла нагрузки 6. Деформация магнитного поля в зазоре при изменении угла нагрузки (см. рис. 35-6) аналогична деформации пружины и вызывает изменение электромагнитного момента. В этом отношении линии магнитной индукции уподобляются упругим нитям, играющим роль пружины. Инерционным-еилам соответствует инерционный, или динамический, вращающий момент ротора, возникающий при наличии положительного или отрицательного углового ускорения ротора. Частота собственных колебаний синхронных машин /0 обычно составляет 0,5—2,0гц. |
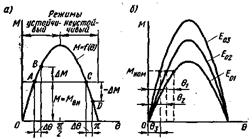 Рис. 6.40. Угловые характеристики при различных значениях Е 0
Рис. 6.40. Угловые характеристики при различных значениях Е 0 

 Рис. 6.50.
Рис. 6.50. 
