 2015-05-18
2015-05-18 2644
2644Теория колебаний особое значение имеет для прикладных задач, встречающихся в инженерной практике, в частности, в вопросах прочности машин и сооружений. Известны случаи, когда строительное сооружение, рассчитанное с большим запасом прочности на статическую нагрузку, разрушалось под действием сравнительно небольших периодически действующих сил. Во многих случаях жесткая и весьма прочная конструкция оказывается непригодной при наличии переменных сил, в то время как такая же более легкая, и на первый взгляд менее прочная, конструкция воспринимает эти усилия совершенно безболезненно. Поэтому вопросы колебаний и поведения упругих систем под действием переменных нагрузок требуют от конструктора особого внимания.
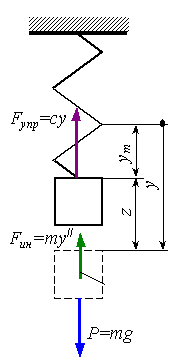
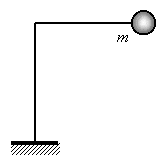
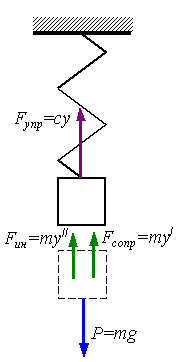
При изучении колебаний упругие системы принято различать, прежде всего, по числу степеней свободы. Под числом степеней свободы понимается число независимых координат, определяющих положение системы. Так, например, жесткая масса, связанная с пружиной (рис.1.3), имеет одну степень свободы, поскольку ее положение определяется только одной координатой -  . Для системы, изображенной на рис.1.4, положение колеблющегося груза в плоскости чертежа определяется тремя независимыми координатами, например двумя координатами центра тяжести и углом поворота массы относительно центра тяжести. Следовательно, система имеет три степени свободы. Любое реальное упругое тело имеет бесчисленное множество степеней свободы. Однако приближенно упругие тела можно рассматривать как предельный случай системы, состоящей из большого числа масс, соединенных между собой упругими связями. Число степеней свободы определяется выбором расчетной схемы, то есть степенью приближения, с которой мы считаем необходимым или возможным исследовать реальный объект.
. Для системы, изображенной на рис.1.4, положение колеблющегося груза в плоскости чертежа определяется тремя независимыми координатами, например двумя координатами центра тяжести и углом поворота массы относительно центра тяжести. Следовательно, система имеет три степени свободы. Любое реальное упругое тело имеет бесчисленное множество степеней свободы. Однако приближенно упругие тела можно рассматривать как предельный случай системы, состоящей из большого числа масс, соединенных между собой упругими связями. Число степеней свободы определяется выбором расчетной схемы, то есть степенью приближения, с которой мы считаем необходимым или возможным исследовать реальный объект.
 |  | ||
| Рис.1.3 | Рис.1.4 |
При исследовании упругих систем различают собственные и вынужденные колебания. Под собственными колебаниями понимаются колебательные движения, которые совершает система, предоставленная сама себе, движение которой происходит в результате начального импульса или смещения из равновесного положения. Реальные собственные колебания всегда являются затухающими.
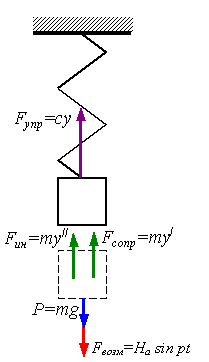
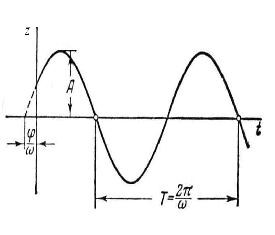
Под вынужденными колебаниями понимается движение упругой системы, происходящее под действием изменяющихся внешних сил, называемых возмущающими. Примером вынужденных колебаний является движение, которое совершает упругое основание, если на нем установлен не полностью сбалансированный двигатель. В этом случае двигатель является источником энергии, периодически подаваемой в систему и расходуемой в процессе вынужденных колебаний на работу преодоления сил трения. Промежуток времени между двумя последующими максимальными отклонениями упругой системы от положения равновесия называется периодом колебаний и обозначается -  . Величина, ему обратная, называется частотой колебаний
. Величина, ему обратная, называется частотой колебаний  и представляет собой число колебаний в единицу времени. Частота измеряется в герцах (Гц) – числом колебаний в одну секунду. В технике вместо частоты
и представляет собой число колебаний в единицу времени. Частота измеряется в герцах (Гц) – числом колебаний в одну секунду. В технике вместо частоты  используется круговая частота
используется круговая частота  , представляющая собой число колебаний в
, представляющая собой число колебаний в  секунд:
секунд:  или
или  . Амплитудой колебаний называется наибольшее смещение упругой системы от положения статического равновесия.
. Амплитудой колебаний называется наибольшее смещение упругой системы от положения статического равновесия.
Колебания упругих систем с одной степенью свободы. В таблице 1.1, а также на рис.1.5-1.7 представлены основные характеристики колебаний механических систем с одной степенью свободы. При этом рассматриваются свободные колебания (рис.1.5), свободные колебания с линейным затуханием (рис.1.6) и вынужденные колебания (рис.1.7). На указанных рисунках действуют: сила упругости растянутой пружины –  , вес груза –
, вес груза –  , сила сопротивления, пропорциональная первой степени скорости движения –
, сила сопротивления, пропорциональная первой степени скорости движения –  , сила инерции –
, сила инерции –  , возмущающая сила, изменяющаяся по периодическому закону –
, возмущающая сила, изменяющаяся по периодическому закону –  .
.
Во всех случаях  представляет собой статическое перемещение, вызванное приложенной массой
представляет собой статическое перемещение, вызванное приложенной массой  к упругой системе. В положении статического равновесия сила упругости растянутой на величину
к упругой системе. В положении статического равновесия сила упругости растянутой на величину  пружины уравновешивается весом:
пружины уравновешивается весом:  . Дифференциальное уравнение свободных колебаний, с учетом преобразований, выполненных в таблице 1.1, дает круговую частоту собственных колебаний упругой системы:
. Дифференциальное уравнение свободных колебаний, с учетом преобразований, выполненных в таблице 1.1, дает круговую частоту собственных колебаний упругой системы:
 | (1.2), |
где c – коэффициент жесткости упругой системы в Н/м.
Решения дифференциальных уравнений, представленные в таблице 1.1, иллюстрируются рисунком 1.8 для свободных колебаний и рисунком 1.9 для свободных колебаний с учетом сил сопротивления. Для удобства преобразований в таблице выполнен переход к новому началу отсчета совпадающему с равновесным положением массы с помощью преобразования  .
.
Полученные в таблице 1.1 решения позволяют определить амплитуды и сдвиг фаз колебаний путем задания начальных условий.
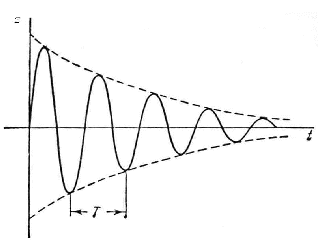
Свободные колебания (рис. 1.5) происходят без рассеяния энергии, то есть при отсутствии сил сопротивления и продолжаются неопределенно долго. В действительности всегда существуют внешние силы, направленные против движения масс и приводящие к постепенному уменьшению амплитуды колебаний (рис. 1.6). По истечении некоторого времени собственные колебания полностью прекращаются.
Природа сил сопротивления бывает различной. Это может быть сопротивление среды (воздух, вода), сопротивление масляного слоя в подшипниках, внутреннее трение в частицах метала и пр. Для простоты принимают обычно, что сила сопротивления пропорциональна первой степени скорости движения. Например, для рассмотренной системы «масса-пружина» (рис.1.4) при составлении уравнения движения в число внешних сил включается сила сопротивления  , где
, где  - коэффициент пропорциональности между силой и скоростью. Из полученного в таблице 1.1 решения дифференциального уравнения свободных колебаний с учетом сил сопротивления видно, что при линейном затухании колебания происходят с уменьшающейся амплитудой (рис. 1.9) при частоте
- коэффициент пропорциональности между силой и скоростью. Из полученного в таблице 1.1 решения дифференциального уравнения свободных колебаний с учетом сил сопротивления видно, что при линейном затухании колебания происходят с уменьшающейся амплитудой (рис. 1.9) при частоте  . Величина
. Величина  мало отличается от частоты собственных колебаний
мало отличается от частоты собственных колебаний  , поскольку величина
, поскольку величина  практически всегда мала по сравнению с
практически всегда мала по сравнению с  . Через интервал времени
. Через интервал времени  амплитуда колебаний уменьшается в отношении -
амплитуда колебаний уменьшается в отношении -  раз.
раз.
| Табл.1.1 | |||
| Колебания | Свободные | Свободные с учетом сил сопротивления | Вынужденные с учетом сил сопротивления |
| Схема процесса | Рис.1.5. | Рис.1.6. | Рис.1.7. |
| Дифференциальное уравнение |  ; ;  ; ; ; ;  |  ; ;  |  ; ;  ; ;  |
| Решение |  |  |  |
| График решения | Рис.1.8. | Рис.1.9. | - |
| Частота колебаний | |  |  |
| Амплитуда колебаний |  |  |  ; ;  ; ;  ; ;  |
| |  |  |
| Рис. 1.5. | Рис. 1.6. | Рис. 1.7. |
 |  |
| Рис. 1.8. | Рис. 1.9. |
Это означает, что отношение двух последующих амплитуд остается величиной постоянной, не зависящей от времени.
При составлении дифференциального уравнения вынужденных колебаний вводится также внешняя возмущающая сила (рис. 1.7), изменяющаяся по гармоническому закону с амплитудой -  и круговой частотой -
и круговой частотой -  . Полное решение дифференциального уравнения вынужденных колебаний, как видно из таблицы 1.1, складывается из решения однородного уравнения без правой части и частного решения уравнения с правой частью. Из полного решения видно, что система участвует в двух колебательных движениях. Первое представляет собой собственное колебательное движение, амплитуда и фаза которого определяются начальными условиями. Эти колебания являются затухающими и по истечении некоторого времени практически исчезают. Второе колебательное движение происходит с частотой возмущающей силы
. Полное решение дифференциального уравнения вынужденных колебаний, как видно из таблицы 1.1, складывается из решения однородного уравнения без правой части и частного решения уравнения с правой частью. Из полного решения видно, что система участвует в двух колебательных движениях. Первое представляет собой собственное колебательное движение, амплитуда и фаза которого определяются начальными условиями. Эти колебания являются затухающими и по истечении некоторого времени практически исчезают. Второе колебательное движение происходит с частотой возмущающей силы  и сдвигом фаз
и сдвигом фаз  . Оно не затухает, а продолжается, пока действует возмущающая сила. Амплитуда вынужденных колебаний, согласно таблице 1.1 будет:
. Оно не затухает, а продолжается, пока действует возмущающая сила. Амплитуда вынужденных колебаний, согласно таблице 1.1 будет:
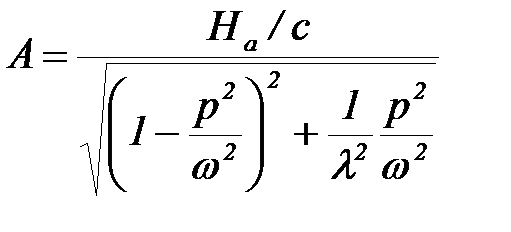 | (1.3). |
Отношение  представляет собой перемещение, которое получила бы упругая система, если бы к ней была статически приложена сила . Следовательно, коэффициент:
представляет собой перемещение, которое получила бы упругая система, если бы к ней была статически приложена сила . Следовательно, коэффициент:
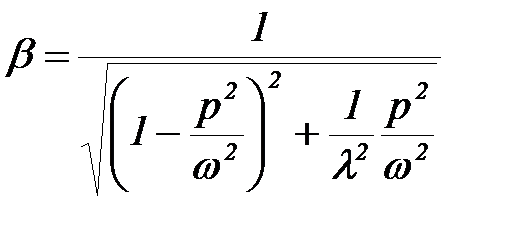 | (1.4), |
показывает, во сколько раз амплитуда вынужденных колебаний больше статического перемещения, вызванного максимальным значением возмущающей силы. Этот коэффициент называется коэффициентом усиления (динамичности) колебаний. Безразмерный коэффициент  в уравнении (13.4) представляет собой коэффициент усиления колебаний при резонансе, так как
в уравнении (13.4) представляет собой коэффициент усиления колебаний при резонансе, так как  при
при  . Коэффициент
. Коэффициент  зависит от двух величин: от отношения частот
зависит от двух величин: от отношения частот  и параметра
и параметра  , то есть от параметра затухания колебаний. Интересно отметить, что при отношении
, то есть от параметра затухания колебаний. Интересно отметить, что при отношении  коэффициент динамичности
коэффициент динамичности  становится меньше единицы, то есть напряжения и смещения упругой системы меньше чем при статическом действии максимальной возмущающей силы .
становится меньше единицы, то есть напряжения и смещения упругой системы меньше чем при статическом действии максимальной возмущающей силы .
В практических расчетах зачастую не учитывают силы сопротивления, что как правило, идет в запас прочности, да и параметры сил сопротивления в большинстве случаев известны весьма приблизительно, в таком случае выражение для коэффициента динамичности приобретает наиболее простой вид:
 | (1.5). |
При  , то есть при
, то есть при  (при отсутствии затухания), величина
(при отсутствии затухания), величина  в случае совпадения частот собственных и вынужденных колебаний обращается в бесконечность. Это означает, что амплитуда вынужденных колебаний неограниченно возрастает. При наличии затухания величина остается ограниченной, но в зоне совпадения частот имеет максимальное значение.
в случае совпадения частот собственных и вынужденных колебаний обращается в бесконечность. Это означает, что амплитуда вынужденных колебаний неограниченно возрастает. При наличии затухания величина остается ограниченной, но в зоне совпадения частот имеет максимальное значение.
Явление повышения амплитуды при совпадении частот собственных колебаний и возмущающей силы носит название резонанса, а само совпадение частот называется условием резонанса.
При приложении возмущающих сил амплитуда вынужденных колебаний достигает своего значения не сразу. Требуется некоторое время, чтобы «раскачать» систему. В связи с этим кратковременное состояние резонанса для сооружений не представляет, как правило, опасности, так как амплитуда в течение короткого промежутка времени не успевает достичь больших значений. Поэтому при разгоне несбалансированного двигателя допускается проход через резонансную частоту вращения необходимо только, чтобы этот проход был по возможности кратковременным.
В практике инженерных расчетов на динамическую прочность вопросы резонанса по своей значимости занимают одно из первых мест. В большинстве случаев законы изменения возмущающих сил носят периодический характер. Например, несбалансированные подвижные части работающего двигателя создают периодически изменяющиеся силы. Поезд, идущий по пути с постоянной скоростью, получает периодические толчки на стыках рельсов. Возникает вопрос о том, насколько опасны возмущающие силы для работы упругой системы и не приведут ли они к ее чрезмерной раскачке и преждевременному разрушению.
Такая задача решается, прежде всего, путем сопоставления частот собственных колебаний и возмущающей силы. В случае, если эти частоты сильно отличаются друг от друга, можно быть уверенным в том, что явление резонанса не возникнет и условия работы для упругих элементов являются благоприятными. При этом представляется возможным определить амплитуду вынужденных колебаний и максимальное значение действующих напряжений цикла. Условие прочностипри вынужденных колебаниях имеет следующий вид:
 | (1.6), |
где:  - напряжение, которое возникло бы в упругой системе при статическом приложении максимального значения возмущающей силы ;
- напряжение, которое возникло бы в упругой системе при статическом приложении максимального значения возмущающей силы ;  - напряжение, возникающее в упругой системе под действием статически приложенного груза
- напряжение, возникающее в упругой системе под действием статически приложенного груза  ;
;  - основное допускаемое напряжение материала.
- основное допускаемое напряжение материала.
В случае, когда сопоставление частот и  указывает на опасность резонанса, обычно путем конструктивных изменений добиваются изменения той или иной частоты. При этом наиболее целесообразным будет изменение частот в сторону увеличения отношения
указывает на опасность резонанса, обычно путем конструктивных изменений добиваются изменения той или иной частоты. При этом наиболее целесообразным будет изменение частот в сторону увеличения отношения  с тем, чтобы добиться наиболее заметного снижения коэффициента
с тем, чтобы добиться наиболее заметного снижения коэффициента  . Можно достичь этого смягчением подвески, то есть уменьшением жесткости упругих элементов колебательной системы. Если нет возможности варьировать частотами, то при возникновении опасности резонанса практикуется демпфирование системы, устанавливая специальные устройства, повышающих рассеяние энергии при колебаниях.
. Можно достичь этого смягчением подвески, то есть уменьшением жесткости упругих элементов колебательной системы. Если нет возможности варьировать частотами, то при возникновении опасности резонанса практикуется демпфирование системы, устанавливая специальные устройства, повышающих рассеяние энергии при колебаниях.

