 2015-06-04
2015-06-04 1414
1414Во многих случаях внешние воздействия, прикладываемые к системе, носят случайный характер, поэтому можно оценить только вероятность появления той или иной формы воздействий в тот или иной момент времени.
Примерами таких систем могут служить система автоматического регулирования напряжения электрического генератора, нагрузка которого определяется потребителями электрической энергии, автопилот, радиолокационная станция и т.д.
Поведение автоматических систем под влиянием случайных воздействий исследуется методами статистической динамики, базирующимися на теории вероятности.
Статистическая динамика системы управления - это поведение системы при случайных воздействиях. При этом рассматривается модель системы, представленная на рис. 9.1.
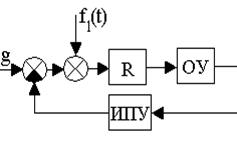
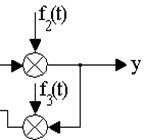
Рис. 9.1. Базовая структура модели системы:
ОУ - объект управления; R - регулятор;
ИПУ - измерительно-преобразовательное устройство;
g(t)=m(t)+n(t) - задающее воздействие;
m(t) - полезный сигнал;
n(t) - помеха; y(t) - управляемая величина;
f1(t) - внутренние шумы системы, приведенные к входу;
f2(t) - внешнее возмущение на объект управления,
приведенное к его выходу;
f3(t) - помехи канала обратной связи, приведенные
к входу измерительного устройства.
Задачей анализа системы, работающей в условиях помех, является исследование ее точности и определение ошибок, вызванных этими случайными помехами. Задачей синтеза системы в этом случае является минимизация ошибок, обусловленных полезным сигналом и помехами. С точки зрения наилучшего воспроизведения полезного сигнала система должна иметь возможно большую полосу пропускания, а с точки зрения наилучшего подавления помехи система, наоборот, должна иметь возможно меньшую полосу пропускания. Критерием получения оптимального решения здесь будет минимальное значение результирующей ошибки системы, определяемой полезным сигналом и помехой [1,6,8].
Для случайных величин наиболее просто определить среднеквадратичную ошибку, поэтому ее и используют для оценки точности автоматической системы.
Задачей синтеза оптимальной системы является нахождение ее передаточной функции, при которой суммарная средняя квадратическая ошибка минимальна.
Задача синтеза системы при заданной структурной схеме заключается в том, что при известных характеристиках полезного сигнала и помехи необходимо определить оптимальные значения параметров системы, при которых суммарная средняя квадратическая ошибка минимальна.

