 2015-08-21
2015-08-21 350
350На жесткость рассчитывают шпиндельные узлы всех типов. При этом определяют упругое перемещение шпинделя в сечении его переднего конца, для которого производится стандартная проверка шпиндельного узла на жесткость. Это перемещение принимают в качестве упругого перемещения переднего конца шпинделя.
В перемещении учитывают только деформации тела шпинделя и его опор. Собственные деформации обрабатываемой детали, режущего инструмента, конического или другого соединения инструмента со шпинделем определяют дополнительными расчетами, не относящимися к расчету шпиндельного узла на жесткость.
Находят радиальную и осевую жесткость. При расчете радиальной жесткости все силы приводят к двум взаимно перпендикулярным плоскостям Y и Z, проходящим через ось шпинделя. Вычисляют радиальное перемещение его переднего конца в этих плоскостях, а затем суммарное перемещение
 ,
,
Необходимо учитывать существенное влияние осевой опоры на перемещение переднего конца, что является следствием защемляющего (реактивного) момента, возникающего в осевой опоре и противоположного по знаку моменту нагрузки. Дополнительное радиальное перемещение представляет собой сдвиг переднего конца под действием силы, возникающей как следствие защемляющего момента. Значения коэффициента, учитывающего при расчете жесткости шпинделя наличие в передней опоре защемляющего момента, приведены в табл. 6.22. Радиальное перемещение шпинделя в заданном сечении, например в плоскости Y,
 d=d1+d2+d3+d4,
d=d1+d2+d3+d4,
где d1 - перемещение, вызванное изгибом тела шпинделя; d 2 -перемещение, вызванное нежесткостью (податливостью) опор; d 3 — сдвиг, вызванный защемляющим моментом; d 4 — перемещение, вызванное податливостью контакта между кольцами подшипника и поверхностями шпинделя и корпуса.
Смещение переднего конца шпинделя зависит не только от его размеров, жесткости опор, нагрузок, но и от схемы нагружения (см. табл.).
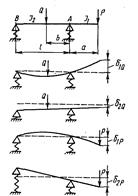
Схема 1. Приводной элемент шпинделя расположен между его опорами (рис. 6.16.). Эта схема типична для токарных и фрезерных станков, а также для многоцелевых станков с ЧПУ. Радиальное упругое перемещение шпинделя в расчетной точке слагается из следующих перемещений: d1Q тела шпинделя под действием силы Q на приводном элементе; d2Q вызванного деформацией опор от силы Q; d1Р тела шпинделя под действием силы резания Р; d2Р вызванного деформацией опор от силы Р.
Примем обозначения: l — расстояние между передней A и задней В опорами шпинделя; а — вылет его переднего конца (консоль); b — расстояние от приводного элемента до передней опоры; I1 — среднее значение осевого момента инерции сечения консоли; I2 — среднее значение осевого момента инерции сечения шпинделя в пролете между опорами; S1 и S2 - площади сечения переднего конца и межопорной части шпинделя; Е — модуль упругости материала шпинделя; G — модуль сдвига материала шпинделя; jA и jB — радиальная жесткость передней и задней опор; е — коэффициент защемления в передней опоре.
| Схема шпиндельного узла | Тип установленных подшипников | Коэффициент защемления | |
| в передней опоре | в задней опоре | ||
 
| 3182100; | 0,45...0,65 | |
 
| 0,30…0,45 | ||
 
| 3182100; | 0,30...0,45 | |
 
| 0,20...0,3 | ||
 
| 0,15...0,2 |
Упругое перемещение переднего конца шпинделя, слагающееся из всех названных выше перемещений, но без учета защемляющего момента
 ,
,
С учетом действия защемляющего момента в передней опоре перемещение переднего конца шпинделя
 ,
,
Угол поворота (рад) в передней опоре
 ,
,
В зависимостях (6.1), (6.2) и в последующих под Р и Q понимают составляющие сил, приведенные к одной плоскости. Перед Q принимают знак "плюс" если силы Р и Q направлены в одну сторону, и знак "минус", если они направлены в противоположные стороны.
Введя в зависимости (6.1) и (6,2) безразмерное отношение l = l/а характеризующее относительную длину межопорной части шпинделя, из равенства dd/dl = 0 находят оптимальное значение l, а следовательно, и оптимальное по условию жесткости расстояние между опорами шпинделя.
| 
|
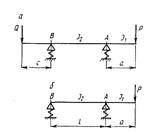
| Рис. 6.16. Составляющие перемещения шпинделя в расчетном сечении | Рис. 6.1 7. Схемы к расчету шпиндельного узла на жесткость |
Схема 2. Приводной элемент расположен на задней консоли на расстоянии с от задней опоры (рис. 6.17, а). Этот случай характерен для внутришлифовальных и отделочно-расточных головок. Перемещение переднего конца шпинделя с учетом защемляющего момента в передней опоре
 ,
,
Знаки перед Q соответствуют случаю, когда силы Р и Q направлены в одну сторону. Если же они направлены в протиповоложные стороны, знаки перед Q заменяются на противоположные. Перемещение переднего конца шпинделя при отсутствии защемляющего момента вычисляют по формуле (6.3) при e =0.
Схема 3. Шпиндель не нагружен силами от привода, на него действует только сила резания Р (рис. 6.17., б). Такие шпиндельные узлы часто применяют в прецизионных станках. Перемещение переднего конца шпинделя с учетом защемляющего момента в передней опоре
 ,
,
Без учета защемляющего момента
 ,
,
Угол поворота шпинделя в передней опоре
 ,
,
Значение l = l/а, оптимальное по условию жесткости шпиндельного узла, находят из уравнения
 ,
,
В связи с тем, что с уменьшением межопорного расстояния биение шпинделей на подшипниках качения увеличивается, для них вводят ограничение l ³ 2,5.








