 2017-12-14
2017-12-14 3318
3318Лабораторная работа №4
Синтез одноконтурных систем регулирования
Цель работы: изучить методику синтеза одноконтурной системы автоматического регулирования (САР) методом Копеловича, исследовать влияние настроек ПИ-регулятора на качество переходного процесса, освоить методику определения прямых показателей качества.
Описание работы
Классическая схема управления с единичной отрицательной обратной связью показана на рисунке 20. Назначение автоматического регулятора заключается в коррекции динамических свойств системы управления с помощью управляющего сигнала u(t) так, чтобы реальный выходной сигнал y(t) как можно меньше отличался от заданного g(t).
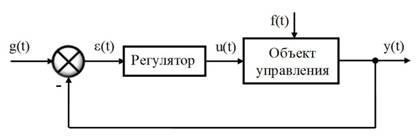
Рисунок 20 - Упрощенная схема САР
Регулятор вырабатывает управляющее воздействие, используя ошибку регулирования ε(t)=g(t)-y(t). Для оценки динамических свойств системы часто рассматривается реакция на единичное ступенчатое воздействие.
Переходный процесс должен отвечать заданным показателям качества, к которым относятся время переходного процесса, перерегулирование, степень затухания и другие, например, интегральные оценки качества.
В простейшем случае регулятор обеспечивает поддержание заданного значения регулируемой величины или изменение ее значения по заданному закону.
В промышленности наиболее распространены линейные регуляторы непрерывного действия, работающие по принципу отклонения (в системах автоматической стабилизации). Они реализуют три основных закона, по которым изменяется управляющее воздействие регулятора, поступающее на регулирующий орган: пропорциональный (П), интегральный (И), дифференциальный (Д). Каждый из законов регулирования имеет свои достоинства и недостатки.
Для использования преимуществ пропорционального и интегрального законов регулирования в автоматических системах широко применяютсярегуляторы, формирующие одновременно как П-, так и И-закон регулирования. Такие регуляторы называются пропорционально- интегральными или, сокращенно, ПИ-регуляторами.
ПИ-регуляторы оказывают воздействие на регулирующий орган пропорционально отклонению ε(t) и интегралу от отклонения регулируемой величины (9). Передаточная функция ПИ-регулятора определяется соотношением (10)

По структуре ПИ-регулятор эквивалентен параллельному соединению П-регулятора с передаточной функцией Wп(s)=kp и И-регулятора с передаточной функцией Wи(s)=1/Tиs (рисунок 21а). Параметрами настройки регулятора являются коэффициент усиления kp и постоянная времени интегрирования Tи, не зависящие друг от друга.
Кроме рассматриваемой схемы на практике широко применяется структурная схема изодромного регулятора, представленного на рисунке 21б.
Эта схема реализует закон регулирования вида (11). Соответствующая передаточная функция регулятора определяется соотношением (12)

Рисунок 21 - Структурные схемы ПИ-регуляторов
Физический смысл постоянной времени изодрома Tиз заключается в том, что это время, в течение которого управляющее воздействие регулятора становится равным удвоенному значению величины, определяемойпропорциональной составляющей. На рисунке 22 показаны переходные процессы идеальных изодромного (линия 1) и пропорционально-интегрального регулятора (линия 2), где ε0 – начальное значение рассогласования.

Рисунок 22 - Переходные характеристики ПИ-регуляторов
Соотношение между Tи и Tиз определяется формулой (13)

Характер переходного процесса определяет качество регулирования.
По графику переходного процесса при внешнем возмущении на объект (рисунок 23) в замкнутой системе можно определить следующие основные показатели качества:
- время переходного процесса tперех. Оно определяется как минимальное время от момента подачи возмущения до момента, когда регулируемая величина будет оставаться близкой к установившемуся значению с заданной точностью, определяемой неравенством (14)

где δ – постоянная величина, значение которой обычно выбирается равной 3-5 % от установившейся величины y(∞).
- максимальное динамическое отклонение регулируемой величины x1 от задания в ходе регулирования.
- величина перерегулирования σ. Она определяется как отношение второй противоположно направленной амплитуды колебаний x2 к первой максимальной амплитуде x1. Это отношение выражается в процентах (15)

- степень затухания определяется по формуле (16)


Рисунок 23 - Переходные процессы в замкнутой САР
Порядок выполнения лабораторной работы
1. Запустите VisSim 3.0. Установите кириллицу с помощью команды главного меню (View-> Fonts…). Чтобы сделать вид диаграммы более аккуратным, укажите в меню (View-> Presentation Mode). Для отображения под блоками их параметров выполните команду (View-> Block Labels). В настройках параметров моделирования (Simulate-> Simulation Properties…) во вкладке Range установите начальное время моделирования Start=0, конечное End=300 (выбирается из соображения того, чтобы переходные процессы успевали завершиться), шаг моделирования Time Step=0.01 сек.
2. Соберите виртуальный стенд для своего варианта объекта, представляющего собой четыре последовательно соединенных апериодических звена первого порядка, получите кривую разгона (рисунок 24). Значения коэффициентов передаточных функций приведены в таблице 3.
На рабочее поле VisSim потребуется поместить следующие блоки:
− генератор ступенчатого единичного сигнала 1 шт. (Blocks-> Signal Producer-> step);
− линейный блок, описываемый передаточной функцией 4 шт. (Blocks->Linear System-> transferFunction);
− осциллограф 1 шт. (Blocks-> Signal Consumer-> plot).


Рисунок 24 - Модель для снятия кривой разгона объекта (пример)
3. Аппроксимируйте полученную кривую разгона апериодическим звеном первого порядка с запаздыванием по методу Ормана (17). При этом параметры передаточной функции определяются согласно соотношениям (18-20)


где: t1 - время, за которое выходная величина y(t) достигает 0.33 от установившегося значения (21)

t2 - время, за которое выходная величина y(t) достигает 0.7 от установившегося значения (22)

Для повышения точности расчетов можно развернуть окно осциллографа на весь экран. Перейти в свойства графика (щелкнуть дважды по центру графика), и в появившемся окне щелкнуть по кнопке Read Coordinates. Появится перекрестие, которое можно переместить на точку, координаты которой следует вычислить, и щелкнуть левой кнопкой мыши.
Координаты будут отображены в специальном поле. Повторный щелчок по графику убирает перекрестие.
4. Определите оптимальные параметры настройки ПИ-регулятора по методу Копеловича. Для этого необходимо определить отношение τоб/Tоб и по номограммам (см. Приложение) найти соответствующие настройки. По методу Копеловича определяются настройки изодромного регулятора (12). Для получения значения постоянной времени интегрирования нужно воспользоваться формулой (13).
5. Постройте модель одноконтурной САР с ПИ-регулятором (рисунок 25). Перенесите на рабочее поле VisSim следующие блоки:
− константу 1 шт. (Blocks-> Signal Producer-> const);
− генератор ступенчатого единичного сигнала 1 шт. (Blocks-> Signal Producer-> step);
− линейный блок, описываемый передаточной функцией 5 шт. (Blocks->Linear System-> transferFunction);
− усилитель 1 шт. (Blocks-> Arithmetic-> gain);
− сумматор 2 шт. (Blocks-> Arithmetic-> summingJunction);
− блок позиционирования 1 шт. (Blocks-> Annotation-> wirePositioner);
− надпись 4 шт. (Blocks -> Annotation -> label);
− осциллограф 1 шт. (Blocks-> Signal Consumer-> plot).
В свойствах блоков укажите заданные и рассчитанные значения параметров. Чтобы изменить знак «+» на «-» в сумматоре summingJunction, удерживая клавишу Ctrl, нужно щелкнуть правой кнопкой мышки по 40 нужному входу сумматора, когда вид указателя сменится на стрелку. Для добавления дополнительных входов у сумматора необходимо выполнить команду (Edit -> Add Connector…), после чего подвести указатель ко входу
блока summingJunction и щелкнуть левой кнопкой мыши. Для описания интегральной составляющей регулятора используйте блок transferFunction, в свойствах которого в строке Numerator введите 1, в строке Denominator введите значение постоянной времени интегрирования, после чего через пробел введите 0. Сделайте поясняющие надписи с помощью блоков label.

Рисунок 25 - Модель одноконтурной САР (пример)
6. Получите переходные процессы в САР по заданию и по внешнему возмущению.
В свойствах блока задания const установите значение, равное 1. В свойствах блока возмущения step установите амплитуду, равную 1, а время подачи Time Delay укажите исходя из того, чтобы к этому времени переходный процесс по заданию уже завершился. В свойствах осциллографа plot установите галочку напротив Grid Lines.
Задайте оптимальные настройки регулятора, рассчитанные в пункте 4. Снимите переходные характеристики и включите их в отчет. 7. Установите значение kp, превышающее рассчитанное в 2 раза, и снова запустите процесс моделирования. Распечатайте получившийся график.
8. Установите значение kp, меньшее рассчитанного в 2 раза, и снова снимите переходные характеристики. Распечатайте получившийся график.
9. Установите рассчитанное оптимальное значение kp и, изменяя в большую и меньшую стороны значение Tи, аналогично получите переходные кривые. Включите их в отчет.
10. После каждого изменения параметров настройки регулятора обработайте полученные кривые при отработке системой внешнего возмущения и найдите показатели качества. Результаты занесите в таблицу 4.

11. Сделайте выводы о влиянии параметров настройки ПИ-регулятора на качество переходного процесса.
12. Сохраните диаграмму с выполненной лабораторной работой (File->Save As…). Протокол лабораторной работы должен содержать:
− цель работы;
− структурную схему САР;
− графики всех переходных функций;
− таблицу результатов расчетов;
− выводы.
Контрольные вопросы
1. Найдите для своего варианта передаточную функцию САР по каналу задание-выход.
2. Найдите для своего варианта передаточную функцию САР по каналу внешнее возмущение-выход.
3. Поясните принцип регулирования по отклонению.
4. Приведите две формы представления ПИ-регулятора и поясните смысл параметров, входящих в передаточные функции.
5. Охарактеризуйте особенности работы П-регулятора.
6. Охарактеризуйте особенности работы И-регулятора.
7. Покажите влияние настроек П-регулятора на качество переходного процесса.
8. Покажите влияние настроек И-регулятора на качество переходного процесса.
9. Покажите влияние настроек ПИ-регулятора на качество переходного процесса.
10. Приведите последовательность расчета ПИ-регулятора по методу Копеловича.
11. Приведите прямые показатели качества переходного процесса при возмущении по заданию.
12. Приведите прямые показатели качества переходного процесса при внешнем возмущении на объект.








