 2018-02-13
2018-02-13 224
224КДАВТ ім. гетьмана П. Конашевича-Сагайдачного
Кафедра технічних засобів судноводіння
Лабораторна робота № 1
По курсу «ДОСЛІДНИЦЬКИЙ ПРАКТИКУМ»
Створення імітаційної моделі судна. Визначення динамічних характеристик моделі. Перевірка адекватності моделі реальному об’єкту.
Виконав: студент 6 курсу гр. 0816
П.І.Б. студента
Комареус М.Ю.
Прийняв: к.т.н., доц. Iванов С.В
Київ, 2013.
Завдання.
Згідно варіанту створити лінійну та нелінійну імітаційні моделі судна. Перевірити моделі на адекватність реальному об’єкту, визначити похибку моделювання.
 |
| Варіант | Судно | Коефіцієнт 
|  , град , град
|  , град , град
|  , с , с
|
| 1 | стійке | 1 | 12 | -12 | 104 |
Короткі теоретичні відомості.
При моделюванні систем керування морськими та річковими суднами перш за все необхідно визначитися з моделлю судна, яка буде використовуватись для аналізу такої складної технічної системи, як система керування судном.
За даними, наведеними в [1], модель судна як об’єкта керування в системі автоматичного керування зазвичай описується у виді
 , (1)
, (1)
де  - кутова швидкість зміни курсу судна,
- кутова швидкість зміни курсу судна,  - кут перекладки стерна;
- кут перекладки стерна;  ,
,  ,
,  , а
, а  ,
,  ,
,  - гідродинамічні коефіцієнти судна і стерна. Ці коефіцієнти взагалі не є сталими і суттєво залежать від завантаження і швидкості судна.
- гідродинамічні коефіцієнти судна і стерна. Ці коефіцієнти взагалі не є сталими і суттєво залежать від завантаження і швидкості судна.
Функція  є нелінійною, її вид визначається безпосередньо по діаграмі керованості судна – його статичній характеристиці. Для моделювання поведінки судна з достатньою точністю можна вважати, що
є нелінійною, її вид визначається безпосередньо по діаграмі керованості судна – його статичній характеристиці. Для моделювання поведінки судна з достатньою точністю можна вважати, що  або ж (за даними зарубіжних авторів)
або ж (за даними зарубіжних авторів)  (с і
(с і  - сталі коефіцієнти).
- сталі коефіцієнти).
Тоді, підставивши в (1) вираз для і перейшовши до операторного запису ( ), отримаємо, що
), отримаємо, що
 , (2)
, (2)
або
 , (3)
, (3)
де  ,
,  ,
,  ,
,  ,
,  ,
,  . Для неасимптотично стійких на курсі суден в лівій частині (2) і (3) ставимо знак «+», для нестійких – «-».
. Для неасимптотично стійких на курсі суден в лівій частині (2) і (3) ставимо знак «+», для нестійких – «-».
Попередньо стійкість судна можна визначити за видом діаграми керованості  або за критерієм, запропонованим Г.В. Соболєвим [2]: асимптотично стійким на курсі вважаємо судно, параметри якого задовольняють нерівність
або за критерієм, запропонованим Г.В. Соболєвим [2]: асимптотично стійким на курсі вважаємо судно, параметри якого задовольняють нерівність  , де
, де  - коефіцієнт повноти корпуса,
- коефіцієнт повноти корпуса,  - ширина судна,
- ширина судна,  - осадка судна.
- осадка судна.
За останніми даними, XIV Міжнародною конференцією дослідних басейнів рекомендовано для вирішення ряду практичних задач використовувати модель судна в формі (за даними [3]):
 (4)
(4)
де – кутова швидкість повороту судна; – кут відхилення стерна;  – нелінійна функція, зв’язана з функцією керованості судна;
– нелінійна функція, зв’язана з функцією керованості судна;  ,
,  ,
,  ,
,  ,
,  ,
,  – параметри моделі.
– параметри моделі.
Модель (4) фактично є розширеною моделлю (2) для неасимптотично стійкого судна; зв’язок між параметрами моделей (2) і (4) визначається формулами
 ,
,  ,
,  ,
,  ,
,  . (5)
. (5)
Для нестійкого судна знак перед в лівій частині змінюється на «-».
Моделі (2) і (3) дають за даними [1] близькі результати для неасимптотично стійких та нестійких суден як при малих, так і при великих кутах перекладки стерна. Однак нелінійні моделі виду (2), (3), (4) не зручні для аналізу і синтезу систем керування судном. Для аналізу і синтезу систем керування по курсу, основним режимом роботи яких є режим стабілізації судна на прямому курсі, можна користуватись лінеаризованою моделлю, що визначається рівнянням
 (6)
(6)
Знак у лівій частині (6) визначається стійкістю судна.
Прийнявши за вихідну функцію в (6) кут відхилення від курсу  , маємо, що
, маємо, що
 .
.
Перейшовши до передаточної функції по керуючій дії, отримуємо, що судно має наступну передаточну функцію по керуючій дії:
 (7)
(7)
Знак у знаменнику (7) знов-таки визначається стійкістю судна. Така система може бути представлена як послідовне з’єднання трьох ланок – коливальної, форсуючої та інтегратора. Ці ланки також можна замінити одною, з передаточною функцією  .
.
Основною задачею при виборі моделі судна є визначення коефіцієнтів моделі в залежності від умов плавання. Далі викладено методику визначення параметрів моделі (5), запропоновану в [3].
З роботи Г.В. Соболєва [2] відомо, що кутова швидкість судна на циркуляції зв’язана з кутом перекладки стерна залежністю
 , (8)
, (8)
яка по суті є рівнянням кубічної параболи, що проходить через початок системи координат (СК)  . Розділивши (8) на
. Розділивши (8) на  , і провівши нескладні перетворення, маємо рівняння
, і провівши нескладні перетворення, маємо рівняння
 (9)
(9)
де  ,
,  ,
,  . (10)
. (10)
Залежність  , яка називається діаграмою керованості судна, будують за результатами натурних випробувань. Для визначення коефіцієнтів
, яка називається діаграмою керованості судна, будують за результатами натурних випробувань. Для визначення коефіцієнтів  проведемо наступну процедуру. Розділимо інтервал робочих частот , знятий з діаграми направленості, на
проведемо наступну процедуру. Розділимо інтервал робочих частот , знятий з діаграми направленості, на  рівних відрізків ширини
рівних відрізків ширини  . Тоді кожному значенню
. Тоді кожному значенню  відповідає своє значення величини
відповідає своє значення величини  . Різниця значень на кінцях інтервалу визначається формулою
. Різниця значень на кінцях інтервалу визначається формулою
 (11)
(11)
Ввівши позначення  ,
,  ,
,  ,
,  , можна (11) записати в формі
, можна (11) записати в формі  . Визначивши коефіцієнти
. Визначивши коефіцієнти  та
та  шляхом лінійної апроксимації залежності даних
шляхом лінійної апроксимації залежності даних  від
від  методом найменших квадратів, легко отримати значення
методом найменших квадратів, легко отримати значення  ,
,  .
.  визначимо як середнє арифметичне
визначимо як середнє арифметичне  значень
значень  , визначених з рівності (9). Далі, за формулами (10) можна визначити , і .
, визначених з рівності (9). Далі, за формулами (10) можна визначити , і .
Для визначення коефіцієнтів , , необхідно скористатись графіком зміни курсу судна при виконанні судном маневру «Зигзаг». Як аналітичне представлення цієї залежності використаємо представлення графіку як сукупності кількох парабол виду
 . (12)
. (12)
Коефіцієнти  ,
,  ,
,  для параболи, проведеної через три експериментально визначені точки
для параболи, проведеної через три експериментально визначені точки  ,
,  ,
,  визначаються з системи рівнянь
визначаються з системи рівнянь
Кутова швидкість судна визначається за залежністю  . Оскільки кінематичні параметри судна при виконанні маневру «Зигзаг» визначались за початкових умов
. Оскільки кінематичні параметри судна при виконанні маневру «Зигзаг» визначались за початкових умов  ,
,  ,
,  ,
,  , то проінтегрувавши (4) за даних початкових умов, отримаємо
, то проінтегрувавши (4) за даних початкових умов, отримаємо
 (13)
(13)
де  ,
,  ,
,  . Для визначення
. Для визначення  , згідно [3], необхідно розв’язати систему рівнянь, отриману з (13) і трьох умовно введених моделюючих функцій
, згідно [3], необхідно розв’язати систему рівнянь, отриману з (13) і трьох умовно введених моделюючих функцій  :
:
 (14)
(14)
Моделюючі функції задано наступним чином:
 ; ;
|
|
 ; ;
|
 . (15)
. (15)В (15)  – час закінчення маневру «Зигзаг». Визначити значення коефіцієнтів
– час закінчення маневру «Зигзаг». Визначити значення коефіцієнтів  ,
,  ,
,  можна з системи лінійних рівнянь
можна з системи лінійних рівнянь
 (16)
(16)
Де  ,
,  ,
,  – значення допоміжної функції
– значення допоміжної функції  , що визначаються з формул
, що визначаються з формул
 (17)
(17)
Провівши обчислення за формулами (14) – (17) і визначивши коефіцієнти  ,
,  ,
,  , значення , , визначаємо з формул:
, значення , , визначаємо з формул:
 (18)
(18)
На відміну від класичного методу, заснованого на інтегруванні рівняння (4), поданого в [5], даний метод потребує набагато менше часу на проведення натурного експерименту (необхідна умова його застосування – наявність не менше 2 зафіксованих періодів коливального руху судна при виконанні маневру «Зигзаг»).
Можливе також визначення параметрів моделі за теоретичними залежностями, наведеними в [4]; відхилення параметрів моделі, визначених з експериментальних даних, від теоретично розрахованих значень, за даними авторів [3] незначне (не більше 2-3%).
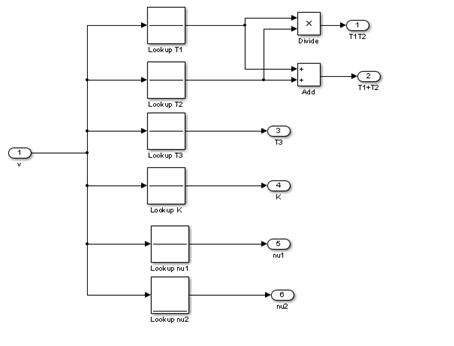
Однак, визначені параметри моделі придатні для моделювання судна лише за певних умов плавання (оскільки і діаграма керованості, і поведінка судна на маневрі «Зигзаг» зняті за певних умов завантаження судна, швидкості судна і т.п.). Для створення моделі, яка враховуватиме поведінку судна за різних умов плавання слід використати діаграми для найбільш характерних та екстремальних режимів і визначити коефіцієнти для них. Для проміжних режимів можна скористатись лінійною інтерполяцією коефіцієнтів моделі (в залежності від основних величин, що визначають ці умови). В середовищі Simulink таку можливість дають блоки «Interpolation using prelookup», «Lookup table 2-D» та «Lookup table n-D» (група «Lookup table»). Ці блоки дають змогу моделювати функції за визначеними даними у вузлових точках, причому в межах таблиці даних – шляхом інтерполяції, а за її межами шляхом екстраполяції. Значення матриць можна як ввести вручну за допомогою редактора таблиць («Lookup table editor»), який викликається кнопкою «Edit…» у вікні властивостей блоку, що реалізує інтерполяцію, так і задати в середовищі MATLab і потім ввести у властивостях блока назву матриці.
Як основні динамічні характеристики моделі для даних умов плавання слід визначити передаточну функцію (для лінійної моделі), а також перехідну функцію АФЧХ системи. З метою визначення перехідної функції на вхід системи слід подати одиничний стрибок; для визначення АФЧХ моделі судна можна в першому (лінійному) наближенні скористатись інструментом «LTI Viewer» (меню «Tools\Linear analysis» вікна моделі).
Для перевірки адекватності моделі необхідно визначити різницю між вихідним сигналом реального об’єкту (судна) і моделі за однакових умов плавання і вхідної дії на модель і судно. Як вихідну величину для судна і моделі варто прийняти кутову швидкість повороту судна , як вхідну – кут відхилення стерна . Це дає змогу безпосередньо порівнювати результати моделювання з діаграмою керованості судна та графіком виконання маневру «Зигзаг». Похибку моделювання  в порівнянні з даними натурного експерименту можна оцінити за коефіцієнтом кореляції виміряних на судні і модельованих даних за формулою [6]:
в порівнянні з даними натурного експерименту можна оцінити за коефіцієнтом кореляції виміряних на судні і модельованих даних за формулою [6]:
 ,
,  (19)
(19)
де  - виміряне значення вихідної величини моделі,
- виміряне значення вихідної величини моделі,  - розраховане за моделлю значення вихідної величини моделі, – кількість точок, за якими побудовано модель,
- розраховане за моделлю значення вихідної величини моделі, – кількість точок, за якими побудовано модель,  та
та  – середні значення величин.
– середні значення величин.
При хорошій якості моделювання похибка складає не більше 5%, тобто коефіцієнт кореляції лежить в межах  .
.
Отриманi результати:
 - 0.02551
- 0.02551
 = 0.02553
= 0.02553
n=31
 =0.00165
=0.00165
 =1.8166*
=1.8166* 
 =-4.7099*
=-4.7099* 
 =8.6772*
=8.6772* 
 =2.0950*
=2.0950* 
a=24.114
b=-9.0960*
 =14662
=14662
 =-0.55237
=-0.55237
 =10.969
=10.969
k=0.91163
Схема системи, створена в Simulink 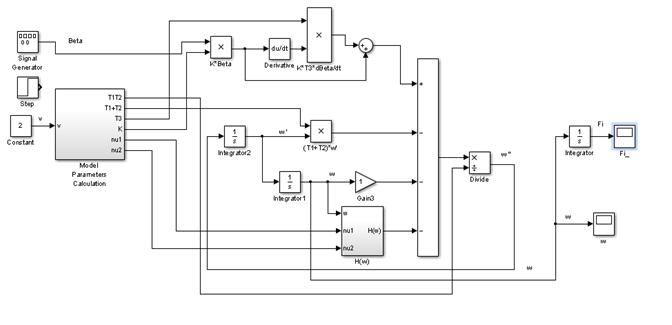

, град
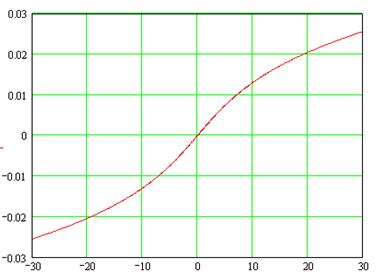
Рис. 1. Діаграма керованості судна.
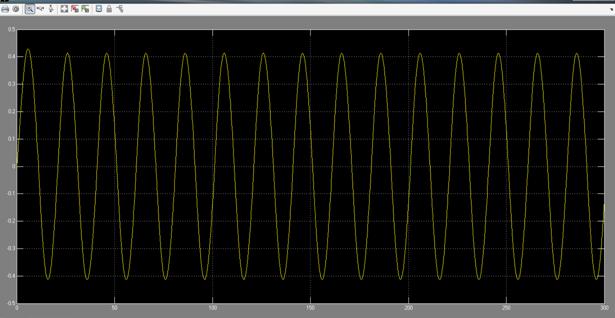
Періоди
Рис. 2. Виконання маневру «Зигзаг» ( відповідає кінцю другого періоду).
Висновки:
Побудували діаграму керованості моделі за формулою (8) і визначити похибку моделювання по діаграмі керованості.
Визначили перехідну функцію та АФЧХ для лінеаризованої моделі судна за різних умов плавання (для типових режимів).
Визначили динамічнi характеристики моделі. Перевірили адекватность моделі реальному об’єкту.








