2020-10-10
2020-10-10 1063
1063Введение
Техническая механика — комплексная дисциплина, включающая три раздела:
1. Теоретическая механика (статика, кинематика, динамика).
2. Сопротивление материалов (деформирование тел).
3. Детали машин (конструкция машины и механизмов, принцип их работы).
Раздел 1. Теоретическая механика.
Подраздел «Статика»
Тема: Основные понятия и аксиомы статики
Статика – это наука, изучающая законы равновесия тел под действием сил.
Равновесие – это состояние покоя или равномерного прямолинейного движения.
Материальное тело (точка) – это тело, размерами и формой которого можно пренебречь, но обладающее массой.
Сила — это мера механического взаимодействия материальных тел между собой.
Сила есть величина векторная, характеризующаяся
-
 точкой приложения (А),
точкой приложения (А), - направлением (линией действия),
- величиной (модулем) (рис. 1.1).
Силу измеряют в ньютонах, 1Н = 1кг • м/с2.
Силы, действующие на тело (или систему тел), делятся на:
· внешние и
· внутренние.
- активные и
- реактивные.
Активные силы вызывают перемещение тела,
Реактивные стремятся противодействовать перемещению тела под действием внешних сил.
Внутренние силы возникают в теле под действием внешних сил.
Совокупность сил, действующих на какое-либо тело, называют системой сил.
Эквивалентная система сил – система сил, действующая так же, как заданная.
Уравновешенной (эквивалентной нулю) системой сил называется такая система, которая, будучи приложенной к телу, не изменяет его состояния.
Систему сил, действующих на тело, можно заменить одной равнодействующей, действующей так, как система сил.
Аксиомы статики
Первая аксиома. Под действием уравновешенной системы сил абсолютно твердое тело или материальная точка находятся в равновесии или движутся равномерно и прямолинейно (закон инерции).
Вторая аксиома. Две силы, равные по модулю и направленные по одной прямой в разные стороны, уравновешиваются (рис. 1.2).
Третья аксиома. Не нарушая механического состояния тела, можно добавить или убрать уравновешенную систему сил (принцип отбрасывания системы сил, эквивалентной нулю) (рис. 1.3).
Четвертая аксиома (правило параллелограмма сил). Равнодействующая двух сил, приложенных в одной точке, приложена в той же точке и является диагональю параллелограмма, построенного на этих силах как на сторонах (рис. 1.4).
Пятая аксиома. Силы, с которыми два тела действуют друг на друга, всегда равны по модулю и направлены вдоль одной прямой в разные стороны (рис. 1.5).
Связи и реакции связей
Все тела делятся на свободные и связанные.
Свободные тела — тела, перемещение которых не ограничено.
Связанные тела — тела, перемещение которых ограничено другими телами.
Тела, ограничивающие перемещение других тел, называют связями.
Силы, действующие от связей и препятствующие перемещению, называют реакциями связей.
Реакция связи всегда направлена с той стороны, куда нельзя перемещаться.
Все связи можно разделить на несколько типов.
Связь — гладкая опора (без трения).Реакция опоры приложена в точке опоры и всегда направлена перпендикулярно опоре (рис. 1.7).
Гибкая связь (нить, веревка, трос, цепь)
Реакция нити направлена вдоль нити от тела, при этом нить может быть только растянута. (рис. 1.8).
Жесткий стержень.
Стержень может быть сжат или растянут. Реакция стержня направлена вдоль стержня. (рис. 1.9). Стержень работает на растяжение или сжатие.
Шарнирная опора
Шарнир допускает поворот вокруг точки закрепления. Различают два вида шарниров.
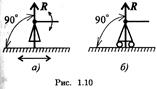
Подвижный шарнир. Стержень, закрепленный на шарнире, может поворачиваться вокруг шарнира, а точка крепления может перемещаться вдоль направляющей (площадки) (рис. 1.10).
Реакция подвижного шарнира направлена перпендикулярно опорной поверхности, т. к. не допускается только перемещение поперек опорной поверхности.
Неподвижный шарнир. Точка крепления перемещаться не может. Стержень может свободно поворачиваться вокруг оси шарнира. Реакция такой опоры проходит через ось шарнира, но неизвестна по направлению. Её принято изображать ввиде двух составляющих: горизонтальной и вертикальной (Rx, Ry) (рис. 1.11).
Защемление или «заделка». Любые перемещения точки крепления невозможны.
Под действием внешних сил в опоре возникают реактивная сила и реактивный момент МR, препятствующий повороту (рис. 1.12).
Реактивную силу принято представлять в виде двух составляющих вдоль осей координат
R = Rx + Ry