2014-02-03
2014-02-03 1990
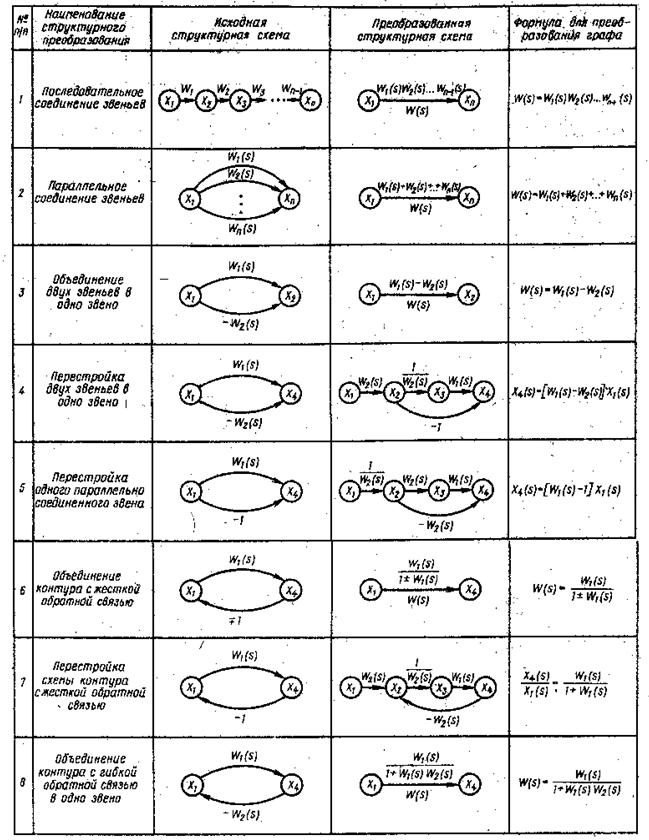
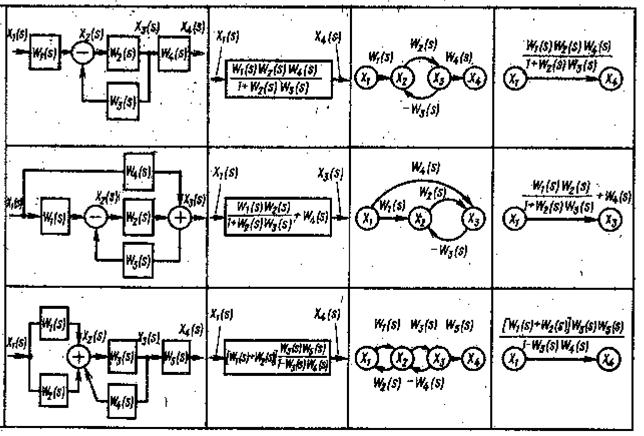
1990Таблица соответствия структурных схем графам
Таблица 2.15
Рис.2.37.Схема замены недетектирующего звена детектирующим с обратной связью
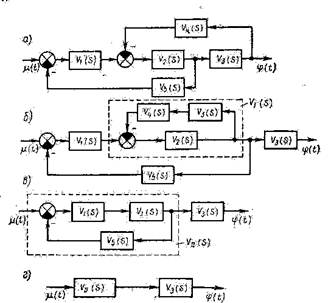
Рис.2.34.Преобразование структурной схемы сложной системы
Раздел 2. Лекция 5. Преобразование структурных схем
Во многих случаях ТОУ, как видно из предыдущего параграфа, и САУ в целом состоят из многих динамических звеньев со сложными связями, что требует для проведения их анализа определённых преобразований.
 Звено с дополнительными связями по своим статическим и динамическим эквивалентно некоторому (обычно более сложному) звену без дополнительных связей. Подобное звено называется условным, или эквивалентным. Некоторые сложные соединения звеньев могут быть заменены сочетанием параллельно м (или) последовательно соединённых звеньев. Такие сложные звенья называются составными. Очень часто нужно решить задачу преобразования сложных систем в эквивалентные им (по динамическим свойствам) более простые, более удобные для анализа, расчёт и синтеза, например, многоконтурные системы привести к одноконтурным.
Звено с дополнительными связями по своим статическим и динамическим эквивалентно некоторому (обычно более сложному) звену без дополнительных связей. Подобное звено называется условным, или эквивалентным. Некоторые сложные соединения звеньев могут быть заменены сочетанием параллельно м (или) последовательно соединённых звеньев. Такие сложные звенья называются составными. Очень часто нужно решить задачу преобразования сложных систем в эквивалентные им (по динамическим свойствам) более простые, более удобные для анализа, расчёт и синтеза, например, многоконтурные системы привести к одноконтурным.
Во всех перечисленных и подобных случаях осуществляются преобразования структурных схем с соблюдение единственно необходимого и достаточного условия: равенства передаточных функций исходной и преобразованной систем.
Рассмотрим для примера преобразование многоконтурной системы (рис.2.34, а) в одноконтурную. Преобразуем её без всякого нарушения путей сигналов в систему, изображённую на рис.2.34, б. Далее заменим систему звеньев, окружённых пунктирным прямоугольником, эквивалентным звеном с передаточной функцией 
Для эквивалентной одноконтурной системы (рис.2.34, в) передаточная функция эквивалентного звена (пунктирный прямоугольник)

Передаточная функция всей системы (рис.2.34, г)

Общая теория преобразования структурных схем была разработана Б.Н. Петровым. На рис. 2.;35 и 2.36 показаны несколько весьма распространённых простейших преобразований структурных схем систем и звеньев.
Следует обратить внимание на следующее обстоятельство. Допустим, что имеется два последовательно соединённых звена, из которых второе – недетектирующее, т.е. оно не только воспринимает воздействие от предыдущего звена, но и само воздействует на него. Схема воздействия двух звеньев (первого – детектирующего и второго – недетектирующего) представлена на рис.2.37. С выхода второго звена (теперь превращённого в детектирующее) воздействие поступает на вход первого, т.е. оба звена теперь охвачены как бы обратной связью и обладает детектирующим воздействием, таким образом, не детектирующее звено по своим динамическим свойствам всегда может быть заменено детектирующим (с обратной связью, подаваемой на вход предыдущего звена).
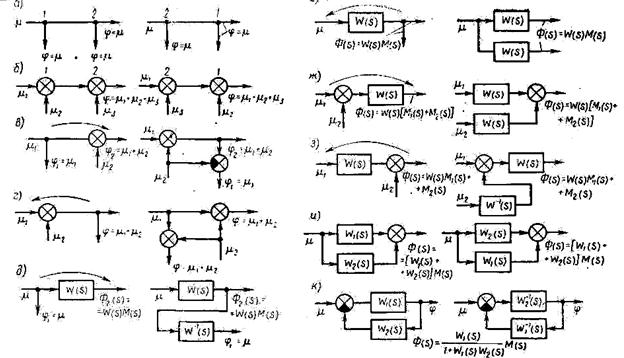 Рис.2.35. Схемы перемещения узлов суммирования и разветвления
Рис.2.35. Схемы перемещения узлов суммирования и разветвления
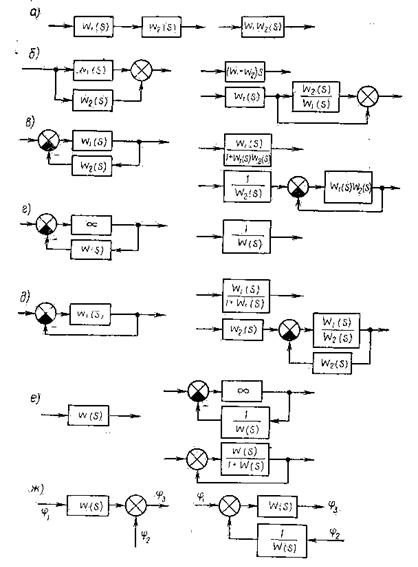 Рис.2.36.Распространённыые простейшие преобразования структурных схем
Рис.2.36.Распространённыые простейшие преобразования структурных схем
Используя передаточные функции для различных типов соединённых звеньев, можно получить передаточные функции соединений звеньев, можно получить передаточные функции весьма сложных систем. В качестве примера рассмотрим получение передаточной функции системы, изображённой на рис.2.38.
Заменим звено 2, охваченное отрицательной обратной связью в виде звена 7, эквивалентным звеном II с передаточной функцией  . Соединённые параллельно звенья 4 и 5 заменим эквивалентным звеном IV с передаточной функцией
. Соединённые параллельно звенья 4 и 5 заменим эквивалентным звеном IV с передаточной функцией  Теперь вся система может быть представлена как последовательное соединение звеньев I, II, III, IV и V, и её передаточная функция равна:
Теперь вся система может быть представлена как последовательное соединение звеньев I, II, III, IV и V, и её передаточная функция равна:  .Подставив в предыдущее выражение значения
.Подставив в предыдущее выражение значения  и
и  , окончательно получим
, окончательно получим
 .
.
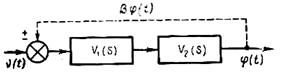
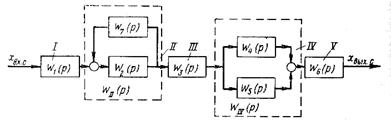 Рис.2.38.Система соединения звеньев
Рис.2.38.Система соединения звеньев  - функции звеньев 1-7
- функции звеньев 1-7
Большинство САР (САУ) при управлении по отклонению можно представить в виде цепочки последовательно соединённых звеньев, охваченных отрицательной обратной связью. На рис.2.39,а значение хвых 4 подано на вход первого звена с отрицательным знаком; передаточная функция обратной связи  Система такого вида называется замкнутой САР.
Система такого вида называется замкнутой САР.
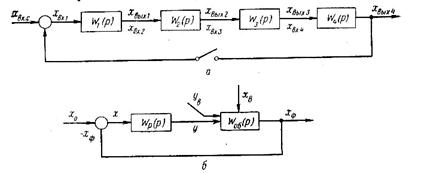 Рис.3.39.Замкнутые системы автоматического регулирования
Рис.3.39.Замкнутые системы автоматического регулирования
Если нарушить обратную связь (разомкнуть выключатель в цепи обратной связи на рис.2.39,а), то получается разомкнутая система. Передаточная функция разомкнутой САР равна произведению передаточных функций отдельных звеньев: 
В общем случае в качестве входной и выходной величин системы, изображённой на рис.2.39, можно рассматривать любые из отмеченных на схеме величин. Допустим, что вход первого звена, а выходной величиной системы является хвых с= хвых 2. При отрицательной обратной связи хвх1= хвых с - хвых 4.
Используя общее выражение передаточной функции, запишем: хвых1(р)= хвх 1  ;
;
хвых2(р) = хвх 2  ; хвых3(р) = хвх 3
; хвых3(р) = хвх 3  ; хвых4(р) = хвх 4
; хвых4(р) = хвх 4  .
.
Из рис.2.39 следует хвых 1(р) = хвх 2(р); хвых 2(р) = хвх 3(р); хвых 3(р) = хвх 4(р). Так как
хвых с(р) = хвых 2(р) = хвх 1 .и учитывая, что хвх1(р)= хвых с(р) - хвых 4(р) получим
хвых с(р) = [хвх c(р) - хвых 4] ..
Подставляя последовательно хвых 2(р)= хвых с(р) вместо хвх 3(р), а хвх 3(р) вместо хвх 4(р), находим: хвых3(р) = хвых с ; хвых 4(р) = хвых с .. Тогда
хвых с(р) = [хвх c(р) - хвых с . ] ; преобразуя это выражение, находим передаточную функцию замкнутой системы:

Использовав передаточную функцию разомкнутой системы запишем:
Получим аналогичным образом передаточные функции замкнутой системы при хвых с, равном хвых1, хвых 2, хвых3, мы смогли бы сделать заключение, что передаточная функция замкнутой системы равна дроби, в числителе которой стоит произведение передаточных функций звеньев, расположенных между входной величиной системы, считая по ходу сигнала, а в знаменателе – сумма из единицы и передаточной функции разомкнутой системы.
При анализе и расчёте САР удобно представлять систему только двумя звеньями: ТОУ и регулятором (рис.2.39, б). В ТОУ входят: регулирующий орган, собственно регулируемый участок, чувствительный элемент (датчик) и измерительный прибор. Входной величиной ТОУ являются: положение регулирующего органа, выражаемое обычно в процентах его хода (полного перемещения), расход энергии или вещества. Примем для этой величины обозначение хвых.об=у. Выходной величиной ТОУ и всей системы САР является регулируемая величина хвых.об= хвых.с= хф. Часто под хф понимают не абсолютное значение регулируемой величины, а её отклонение от первоначального значения в положении равновесия.
В регулятор входят: регулирующее устройство и исполнительный механизм. Входной величиной регулятора является рассогласование (ошибка регулирования) х:  , где хо и хф – заданное и фактическое (действительное) значения регулируемой величины.
, где хо и хф – заданное и фактическое (действительное) значения регулируемой величины.
Выходная величина регулятора, как правило, представляет собой угол поворота выходного вала исполнительного механизма. Так как обычно перемещение регулирующего органа пропорционально перемещению исполнительного механизма, то  . Часто
. Часто  .
.
Для систем, состоящих из ТОУ и регулятора, передаточная функция разомкнутой системы имеет вид 
 ;
;  - передаточные функции объекта и регулятора.
- передаточные функции объекта и регулятора.
Наиболее часто в системах автоматического регулирования рассматривают два типа возмущающих воздействий:
1)возмущающее воздействие по нагрузке ТОУ, т.е. изменяющее подачу в ТОУ энергии или вещества. Это возмущение  обычно можно выразить в эквивалентном перемещении регулирующего органа (в % хода регулирующего органа), и поэтому его также называют также возмущением по положению регулирующего органа;
обычно можно выразить в эквивалентном перемещении регулирующего органа (в % хода регулирующего органа), и поэтому его также называют также возмущением по положению регулирующего органа;
2)возмущение, вызываемое изменением заданного значения регулируемой величины, называют возмущением по заданию.
При возмущении по нагрузке входной величиной системы (рис.2.39, б) между входной и выходной величинами системы по ходу сигнала расположено два звена – регулятор и объект. Поэтому передаточная функция замкнутой системы при возмущении по заданию

Если за выходную величину системы считать ошибку регулирования  , то передаточная функция замкнутой системы при возмущении по заданию имеет вид
, то передаточная функция замкнутой системы при возмущении по заданию имеет вид

Частные передаточные функции замкнутых систем могут быть получены подстановкой в приведённые выше формулы величины  . В табл.2.14 приведено сопоставление преобразований в структурных схемах линейный элементов (объектов) и САР (САУ).
. В табл.2.14 приведено сопоставление преобразований в структурных схемах линейный элементов (объектов) и САР (САУ).
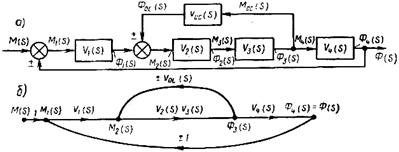 Рис.2.40.Структурная схема (а) и эквивалентный ей сигнальный граф (б)
Рис.2.40.Структурная схема (а) и эквивалентный ей сигнальный граф (б)
Для характеристики структуры САР (САУ) широко используются так называемые сигнальные графы. Они состоят из узлов и ветвей (рис.2.40) и представляют собой топологическую структуру систем. При этом ветви описывают передаточные функции по пути следования сигнала, а узлы характеризуют появление сигналов, описываемых изображениями по Лапласу. Поэтому точки разветвления пути следования сигнала (в них не образуются новые сигналы) не являются узлами сигнального графа. На рис.2.40 показаны как структурная схема, так и эквивалентный её сигнальный граф автоматической системы с местной (дополнительной) и общей замыкающей обратными связями. В табл.2.15 показаны преобразования графов линейных элементов (объектов) и САР.
У многоёмкостных объектов, состоящих из  ёмкостей, имеется выходных координат
ёмкостей, имеется выходных координат  и возможно воздействие внешних воздействий
и возможно воздействие внешних воздействий  , из которых некоторых некоторые могут равняться нулю. При этом в силу принципа аддитивности воздействий для линейных систем выходная координата каждой ёмкости линейно зависит от всех возмущений, приложенных к ёмкостям объекта. Иначе говоря, для изображений выходных координат
, из которых некоторых некоторые могут равняться нулю. При этом в силу принципа аддитивности воздействий для линейных систем выходная координата каждой ёмкости линейно зависит от всех возмущений, приложенных к ёмкостям объекта. Иначе говоря, для изображений выходных координат  и возмущений
и возмущений  можно написать линейных уравнений:
можно написать линейных уравнений:
или в общем виде
 где участвуют
где участвуют  передаточных функций, образующих матрицу
передаточных функций, образующих матрицу
Первая цифра индексов относится к номеру выходной координаты (к данной ёмкости), вторая – к возмущениям, приложенным к соответствующим ёмкостям.
Для двухёмкостного гидравлического объекта, рассмотренного выше, можно, очевидно, написать (с учётом принятой здесь индексацией арабскими цифрами):
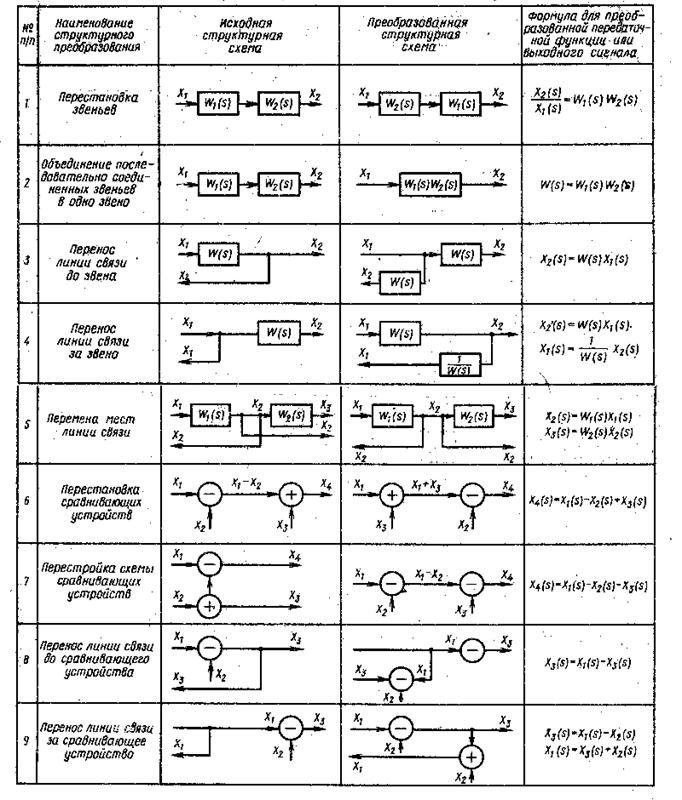 Таблица 2.4
Таблица 2.4
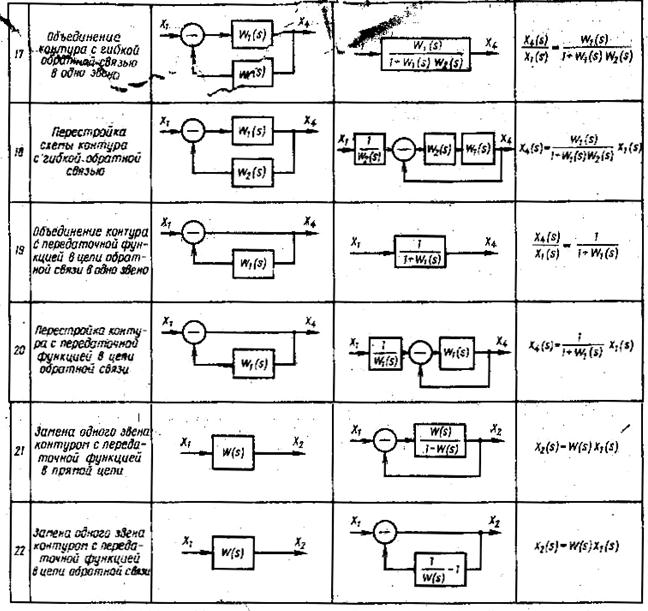
Преобразования в структурных схемах линейных элементов (объектов) и САР
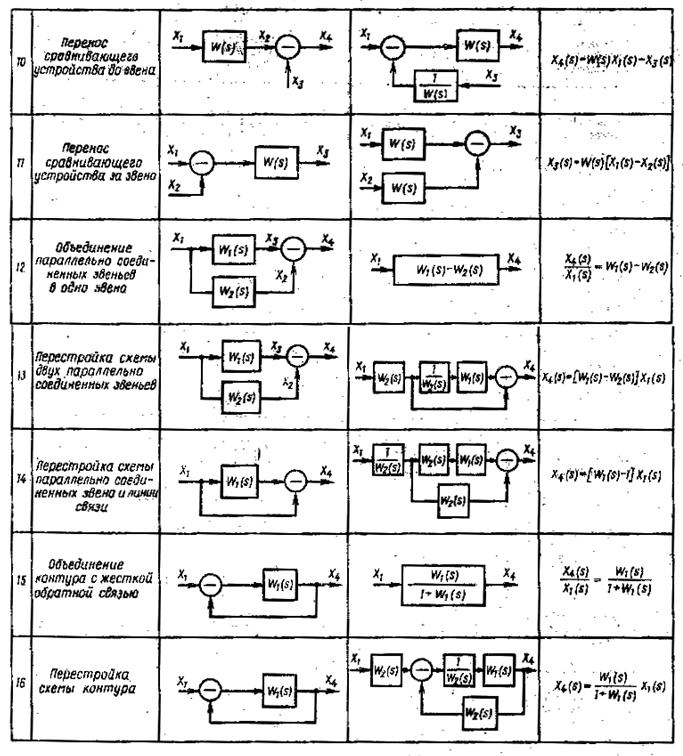 Продолжение табл.2.14
Продолжение табл.2.14
 Продолжение табл.2.14
Продолжение табл.2.14
После преобразования по Лапласу обеих частей уравнений получим (при нулевых начальных условиях):
или
Из последней линейной системы уравнений найдём:
Преобразования графов линейных элементов (объектов) и САР
 Продолжение табл.2.15
Продолжение табл.2.15
Сопоставляя эти значения изображений выходных координат ёмкостей с полученными в системе уравнений  -
-  , можем записать
, можем записать
Пример. Преобразовать структурную схему сложного динамического объекта (рис.2.55, а), имеющей несколько пересекающихся обратных связей.
Рис.2.41.Структурная схема сложного одномерного динамического объекта с перекрещивающимися связями: а – исходная; б – преобразованная
Воспользуемся структурными преобразованиями, указанными в табл.2.14. В результате получим структурную схему (рис.2.41, б), где нет перекрещивающихся обратных связей. Для каждого её контура можно записать передаточные функции в виде
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 . Результирующую передаточную функцию (последнее соотношение) определяют путём подстановки в неё последовательно предыдущие передаточные функции.
. Результирующую передаточную функцию (последнее соотношение) определяют путём подстановки в неё последовательно предыдущие передаточные функции.
Пример. Преобразовать структурную схему двухмерного линейного объекта с перекрёстными связями. Исходная схема с двумя замкнутыми контурами показана на рис.2.42, а.
Рис.2.42.Структурная схема сложного двухмерного динамического объекта с пересекающимися связями: а -исходная; б 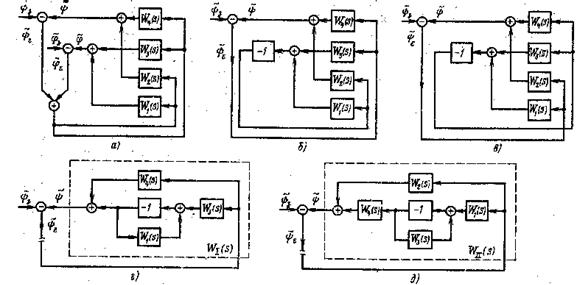 и в – преобразованные путём введения передаточной функции равной -1; г - для передаточной функции
и в – преобразованные путём введения передаточной функции равной -1; г - для передаточной функции  ; д – для передаточной функции
; д – для передаточной функции 
Для определения по ней передаточной функции первого канала  примем, что
примем, что  =0, т.е.
=0, т.е.  = - и
= - и  .
.
Введём данную передаточную функцию в исходную схему; тогда получим схему, изображённую на рис.2.42, б. Эту схему можно привести к двум схемам, приведённым на рис.2.42, в и г. Выделим на них штриховыми прямоугольниками разомкнутые передаточные функции  . Результирующую передаточную функцию
. Результирующую передаточную функцию  найдём из условия её линейности, а следовательно, справедливости принципы суперпозиции, т.е.
найдём из условия её линейности, а следовательно, справедливости принципы суперпозиции, т.е.
 .
.
Пользуясь передаточной функцией, анализируют устойчивость рассматриваемого линейного объекта.
Пример. Преобразовать граф объекта (рис.2.43, а) к более простому виду. Воспользуемся для этого схемами табл.2.15. На рис.2.43, б показан первый этап преобразования графа, а на рис.2.43, в – второй. В результате выполнения второго этапа преобразования получен граф с меньшим числом вершин и рёбер, что упрощает исследование объекта и позволяет получить результирующую передаточную функцию объекта в виде
 .
.
Применение структурных преобразований обеспечивает получение таких результирующих схем и графов, пользуясь которыми можно достаточно просто без каких-либо вспомогательных вычислительных находить передаточные функции сложных динамических элементов (объектов), используемых для построения частотны характеристик.
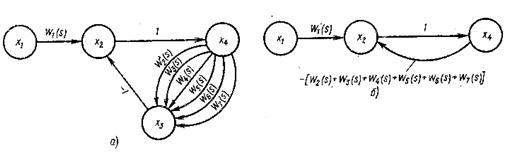
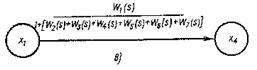
Рис.2.43.Преобразование графа объекта к расчётному виду: а – исходная схема; б – первый этап; в – второй этап
Следует отметить, что между структурными схемами и графами существует однозначное соответствие, которое хорошо можно проследить с помощью таблицы соответствий структурных схем графам (табл.2.16).
Внутреннее строение элементов (объектов) САР наиболее просто определяется с помощью структурных схем и графов. Последние могут составляться по дифференциальным и разностным уравнениям, записанным с использованием изображения функций или с помощью передаточных функций типовых звеньев. При этом удаётся оценить влияние параметров уравнений или типовых звеньев и связей между ними на динамические характеристики элементов. В результате проектировщик могут упрощать структуру исследуемого элемента и находить в нём сильные и слабые связи. Исключая из структурных схем и графов слабые связи, нетрудно выполнить операции декомпозиции.
На структурных схемах, полученных с помощью дифференциальных и разностных уравнений, динамические элементы выделяют прямоугольниками, а их взаимосвязи – прямыми линиями. Каждая взаимная связь представляет собой переменную уравнений. При составлении структурных схем с помощью передаточных функций типовые звенья изображают на схемах также прямоугольниками, а связи – прямыми линиями. В графах переменные указывают в виде вершин, а дуги обозначают или параметры, или передаточные функции типовых звеньев. На дугах ставят стрелки, указывающие направление передачи сигнала.
 Таблица 2.16
Таблица 2.16
 Продолжение табл.2.16
Продолжение табл.2.16
Контрольные вопросы.