 2014-02-24
2014-02-24 1988
1988Примечание
Примечание
В некоторых случаях задающее устройство конструктивно объединено с регулятором.
Регулятор (Р) с помощью элемента сравнения определяет отклонение текущего значения регулируемого параметра от заданного значения и формирует командный сигнал в соответствии с заложенным в нем алгоритмом регулирования. Сигнал, формируемый регулятором, по мощности не всегда достаточен, чтобы управлять ИУ, поэтому регулятор часто снабжается усилителем мощности.
Устройство автоматической системы управления, воздействующее на технологический процесс в соответствии с полученным от регулятора командным сигналом, называется исполнительным устройством (ИУ). Как правило, в нем можно выделить два функциональных элемента: регулирующий орган и исполнительный механизм.
Исполнительный механизм (ИМ) предназначен для усиления мощности командного сигнала, получаемого от регулятора, и воздействия на регулирующий орган (РО).
Исполнительный механизм, перемещающий затвор регулирующего органа, часто называют исполнительным двигателем, или серводвигателем (сервомеханизмом).
Регулирующий орган (РО) — техническое средство изменения материального или энергетического потока, влияющего на регулируемую величину в ОУ. Это устройство, непосредственно воздействующее на ОУ для поддержания заданного значения регулируемой величины или изменения ее по заданному закону.
При исследовании динамических свойств системы регулирования по каналу задающего воздействия (вход — задающее воздействие  , выход — регулируемая величина
, выход — регулируемая величина  , возмущающее воздействие отсутствует или является постоянной величиной), систему автоматического управления удобно изображать упрощенной структурной схемой, представленной на рис. 15.
, возмущающее воздействие отсутствует или является постоянной величиной), систему автоматического управления удобно изображать упрощенной структурной схемой, представленной на рис. 15.
При исследовании динамических свойств системы регулирования по каналу возмущающего воздействия (вход — возмущающее воздействие  , выход — регулируемая величина , задающее воздействие является постоянной величиной) САР обычно изображают упрощенной структурной схемой, представленной на рис. 16.
, выход — регулируемая величина , задающее воздействие является постоянной величиной) САР обычно изображают упрощенной структурной схемой, представленной на рис. 16.
Для повышения устойчивости и улучшения динамических свойств системы управления в нее вводят корректирующие устройства (на рис. 14 не показаны). В зависимости от способов подключения корректирующие устройства делятся на последовательные и параллельные. С помощью последовательных корректирующих устройств происходит преобразование сигнала ошибки, и в управляющее воздействие вводятся составляющие, пропорциональные производной и интегралу от ошибки по времени. Параллельные корректирующие устройства (местные дополнительные обратные связи) подают сигнал с выхода элемента на вход одного из предыдущих. Функции корректирующих устройств могут выполнять компьютеры.
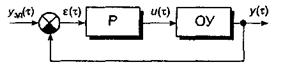
Рис. 15. Структурная схема САР по каналу задающего воздействия
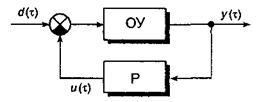 Рис. 16. Структурная схема САР по каналу возмущающего воздействия
Рис. 16. Структурная схема САР по каналу возмущающего воздействия
Технической базой построения АСУ ТП и АСУП в различных отраслях промышленности является Государственная система промышленных приборов и средств автоматизации (ГСП). В основу построения и развития ГСП положены следующие принципы:
1. выделение типовых функций автоматического контроля, регулирования и управления;
2. минимизация номенклатуры технических средств;
3. построение технических устройств на основе типовых унифицированных блоков и модулей;
4. агрегатное построение сложных систем управления на основе унифицированных приборов и устройств;
5. совместимость приборов и устройств ГСП на основе:
а) унификации сигналов связи, используемых для обмена ин
формацией между изделиями ГСП в системах управления (информационная совместимость);
б) унификации конструкций (конструктивная совместимость);
в) унификации эксплуатационных требований (эксплуатационная совместимость);
г) унификации метрологических характеристик средств измерений (обеспечение единства измерений или метрологическая совместимость).
По функциональному признаку технические средства ГСП разделяются на средства:
• получения информации о состоянии ХТП (к ним относят первичные измерительные преобразователи, нормирующие преобразователи, формирующие унифицированный сигнал, измерительные приборы, устройства алфавитно-цифровой информации). Устройства этой группы предназначены для преобразования измеряемой физической величины в удобный для восприятия, передачи и обработки сигнал измерительной информации;
• приема, преобразования и передачи информации по каналам связи (к ним относят различные преобразователи сигналов и кодов, коммутаторы измерительных цепей, шифраторы и дешифраторы, согласующие устройства, устройства для дистанционной передачи и т. д.). Эти средства используют для приема, преобразования и передачи сигналов, содержащих измерительную информацию и несущих команды управления;
• преобразования, обработки, хранения информации и формирования управляющих воздействий, представления информации операторам (к ним относят функциональные и операционные преобразователи), а также логические устройства, анализаторы сигналов, запоминающие устройства, регуляторы (контроллеры), задатчики, управляющие вычислительные устройства. Эти средства представляют центральную часть ГСП;
• использования командной информации для воздействия на технологический процесс (к ним относят исполнительные устройства, состоящие из исполнительных механизмов и регулирующих органов, усилители мощности и вспомогательные устройства к ним).
По роду энергии, используемой в качестве носителя информации при передаче сигналов, устройства ГСП делятся на:
• электрические (обладают быстродействием, высокой точностью, способностью передачи информации на большие расстояния, а также большой «емкостью» каналов передачи информации);
• пневматические (способны работать во взрыво- и пожароопасных производствах);
• гидравлические (обеспечивают точные перемещения исполнительных устройств и большие перестановочные усилия).
Для обеспечения информационного сопряжения в ГСП применяют унифицированные сигналы. Унифицированный сигнал ГСП — сигнал дистанционной передачи информации с унифицированными параметрами. Вид носителя информации и параметры унифицированного сигнала не зависят от вида измеряемой величины, метода измерения и диапазона изменения измеряемой величины. Обычно унифицированные сигналы получаются в результате преобразования и нормирования сигналов первичных измерительных преобразователей при помощи встроенных в датчики или внешних нормирующих преобразователей. В зависимости от вида унифицированных параметров в ГСП применяют унифицированные сигналы четырех групп:
• сигналы тока и напряжения электрические непрерывные;
• сигналы частотные электрические непрерывные;
• сигналы электрические кодированные;
• пневматические сигналы.
Основные виды унифицированных сигналов ГСП приведены в табл. 1.
Таблица 1. Основные виды унифицированных сигналов ГСП
| Электрические сигналы | Пневматический сигнал | ||||
| Постоянныйток | Напряжение постоянного тока | Напряжение переменного тока | Частота | ||
| мА | мВ | В | В | кГц | кПа |
| 0...5 | 0...10 | 0...10 | 0...2 | 4...8 | 20... 100 |
| 0...20 | 0...20 | 0...1 | |||
| 4...20 | -10... 0...+10 | -1...0...+1 | -1...0...+1 | 2...4 | |
| -5...0...+5 |

