 2015-01-30
2015-01-30 5026
5026Лекция 14.
Управление арматурой в зависимости от задач, которые она выполняет, от степени автоматизации системы, обслуживаемой арматурой, от места ее расположения и используемого источника энергии может осуществляться различными способами. Привод по месту его расположения относительно арматуры может быть местным (насадным, встроенным) и дистанционно расположенным (колонковым), т. е. соединенным с арматурой дистанционной механической передачей. В зависимости от источника движения приводы делятся на ручные и механические. Механические приводы могут быть электрическими (электромоторные, электромагнитные), пневматическими и гидравлическими, которые, в свою очередь, по конструкции делятся на поршневые и мембранные.
Ручные приводы. Ручное управление арматурой является наиболее простым и надежным видом управления. В зависимости от диаметра маховика и места его расположения относительно корпуса оператора усилие, которое может приложить к маховику физически нормально развитой человек, находится в пределах от 200 до 750 Н.
Помимо роли основного привода ручной привод имеет широкое применение как вспомогательный (ручной дублер) во всех механических приводах.
Ручные дистанционные приводы (рис. 1) применяют для управления арматурой любого диаметра, работающей при любых параметрах среды, которая установлена в местах, недоступных для непосредственного управления.
Электромоторные приводы. Эти приводы нашли самое широкое применение для управления арматурой. Они достаточно экономичны, имеют компактную конструкцию, простую электрическую схему. Приводы могут быть встроенными, т. е. установленными на самой арматуре, или колонковыми, установленными отдельно от арматуры.

Рис. 1. Дистанционный ручной привод:
1 - штанга; 2 - коробка перемены направления; 3 -колонка
Кинематическая схема электропривода (рис. 2) состоит из электродвигателя 1, двухступенчатого зубчатого редуктора, включающего блок шестерен 2, червячного редуктора, состоящего из червяка 5 и червячного колеса 6. Червячное колесо 6 насажено на приводной вал 7 запорного органа. На валу 7 также размещен червяк 8, который образует с червячным колесом 9 передачу, связанную с блоком концевых выключателей 10. Привод снабжен маховиком 4 для управления арматурой вручную. При полном открывании арматуры электродвигатель отключается концевым выключателем. При полном закрытии отключение электродвигателя производится: у электроприводов, управляющих регулирующей арматурой — концевым выключателем; у электроприводов, управляющих запорной арматурой, — с помощью токового реле, настраиваемого на срабатывание при определенной силе тока, соответствующей заданному крутящему моменту на шпинделе арматуры.
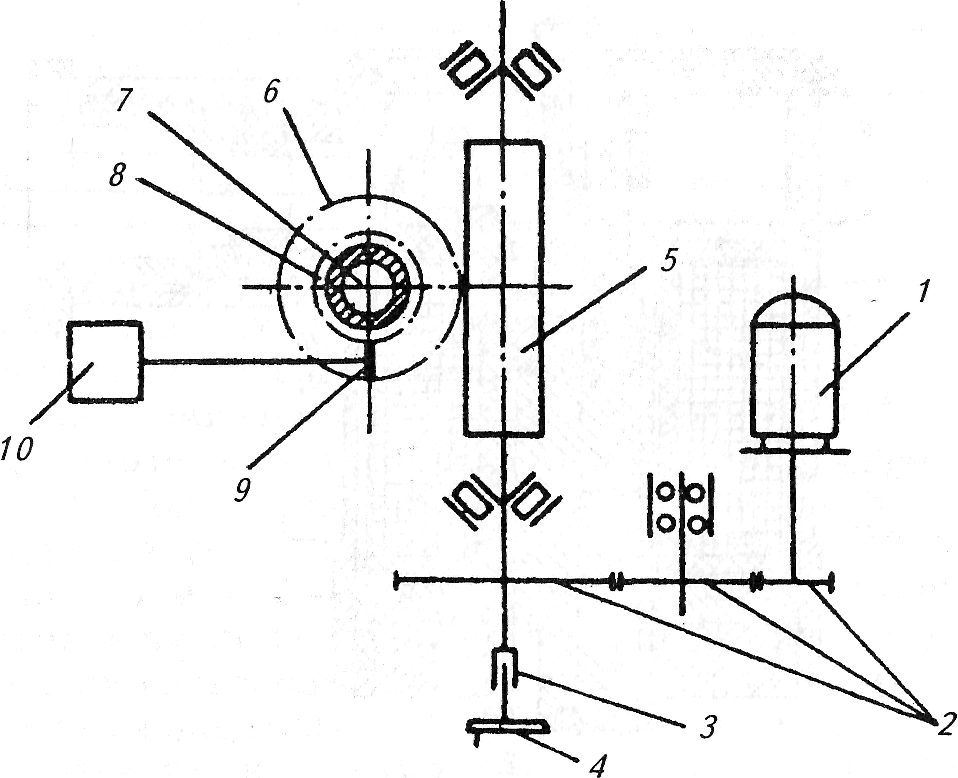
Рис. 2. Кинематическая схема электропривода:
1 -электродвигатель; 2 - блок шестерен; 3 - муфта ручного привода;
4 -маховик; 5,8 - червяк; 6,9 - червячное колесо; 7 - приводной вал
запорного органа; 10 - блок концевых выключателей
В конструкции электроприборов предусмотрена блокировка ручного управления: при переходе на ручное управление цепь электродвигателя разрывается.
Электроприводы, предназначенные для управления регулирующей арматурой, снабжены специальным потенциометрическим датчиком, сигнализирующим на пульт управления о степени открытия арматуры.
Встроенные электроприводы применяют для арматуры, в которой температура протекающей среды не выше допустимой температуры для электродвигателей встроенного типа. Встроенные электроприводы поставляют комплектно с арматурой, которая выбирается по параметрам среды и условному проходу.
Колонковые электроприводы устанавливают в том случае, когда не может быть установлена арматура с встроенным электроприводом или когда для арматуры с ручным приводом требуется дистанционное или автоматическое управление (в основном для запорной арматуры, имеющей приводную головку). Колонковый электропривод в зависимости от принятой схемы состоит из колонки и размещенного на ней электродвигателя с редуктором, а также из шарнирных узлов, коробок перемены направления, соединительных штанг.
Электромагнитные приводы. Они применяются наиболее часто в конструкциях запорной и распределительной арматуры с условными диаметрами прохода от 0,8 до 250 мм и давлением рабочей среды от 1·10-7 Па до 20 МПа и более при рабочей температуре среды от -200 до + 500 °С.
Электромагнитные приводы могут быть тянущего, толкающего, поворотного и реверсивного действия. Они обладают высоким ресурсом, быстродействием, без затруднений согласуются с другими элементами систем автоматического управления. Основными элементами электромагнитного привода являются катушка и магнитопровод (рис. 3, 4).
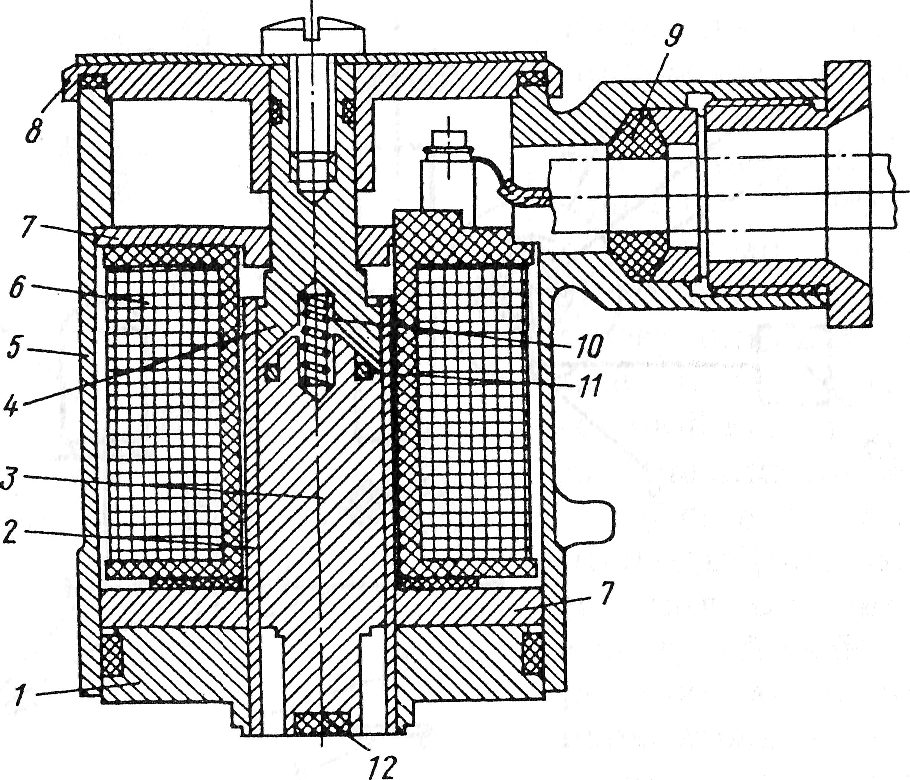
Рис. 3. Электромагнитный привод тянущего типа:
1 - фланец; 2 - разделительная трубка; 3 -сердечник; 4 - полюс; 5 - кожух; 6 - катушка; 7 - шайбы; 8 - крышка; 9 - сальник кабеля; 10 - пружина; 11 - короткозамкнутое кольцо
Поршневые приводы. В арматуре поршневые приводы применяются для управления кранами, заслонками, клапанами и задвижками. Наиболее существенными достоинствами этих приводов являются следующие: возможность получения больших ходов и усилий при прямолинейном ходе штока; простота конструкции и ограниченное число деталей; простота ограничения усилия путем ограничения давления управляющей среды; быстродействие.
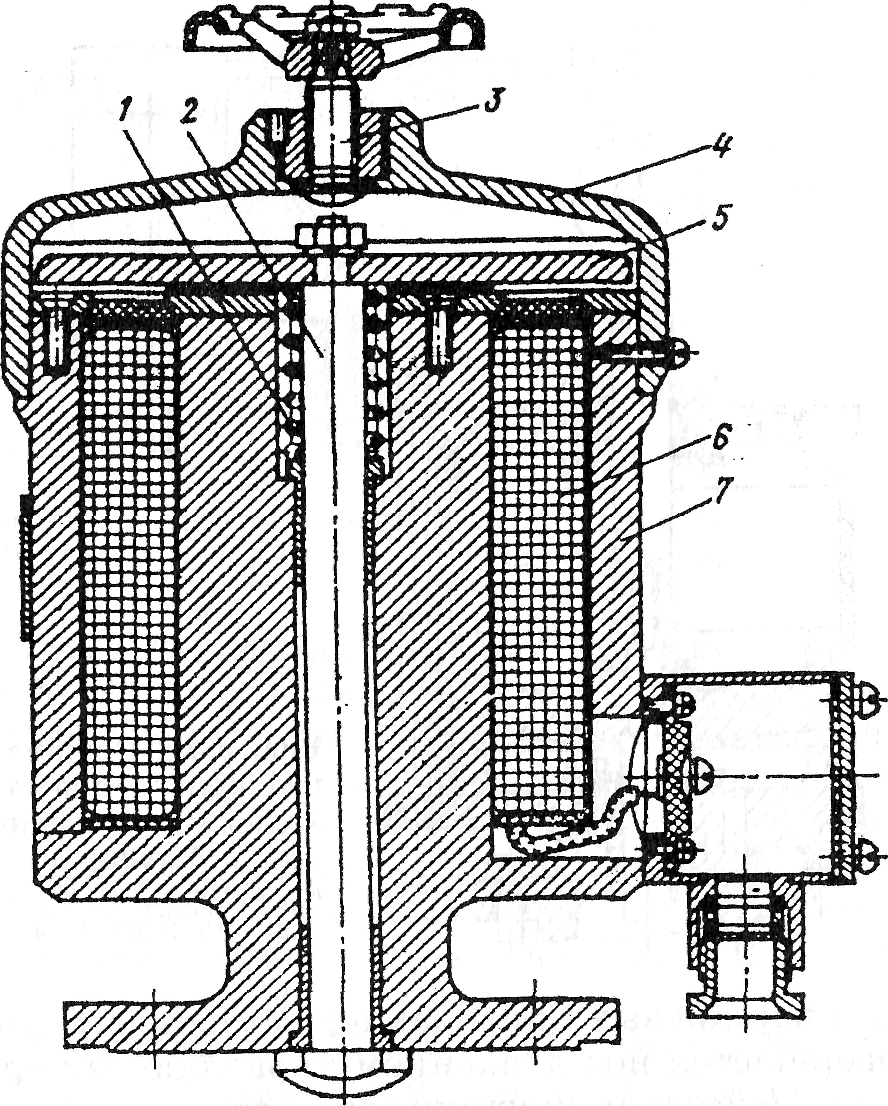
Рис. 4. Блочный электромагнитный привод толкающего типа с внешним притягивающимся дисковым сердечником для клапанов с малым ходом
затвора:
1 - пружина; 2 - шток; 3 - ручной дублер привода; 4 - крышка корпуса; 5 - сердечник; 6 - катушка; 7 - корпус
По свойствам управляющей среды поршневые приводы арматуры можно разделить на пневмоприводы, гидроприводы и пневмо-гидроприводы; по циклу срабатывания — на приводы двустороннего и одностороннего действия.
В поршневых приводах двустороннего действия прямой и обратный ходы совершаются под давлением управляющей среды (рис. 5). В поршневых приводах одностороннего действия прямой ход совершается под давлением управляющей среды; обратный ход — под действием пружины возврата, предварительно сжатой при прямом ходе поршня (рис. 6).
По характеру движения выходного звена поршневые приводы Можно разделить на прямоходные и поворотные. В прямоходных выходной шток совершает поступательное прямолинейное движение, в поворотных — вращение, обычно на 90°.
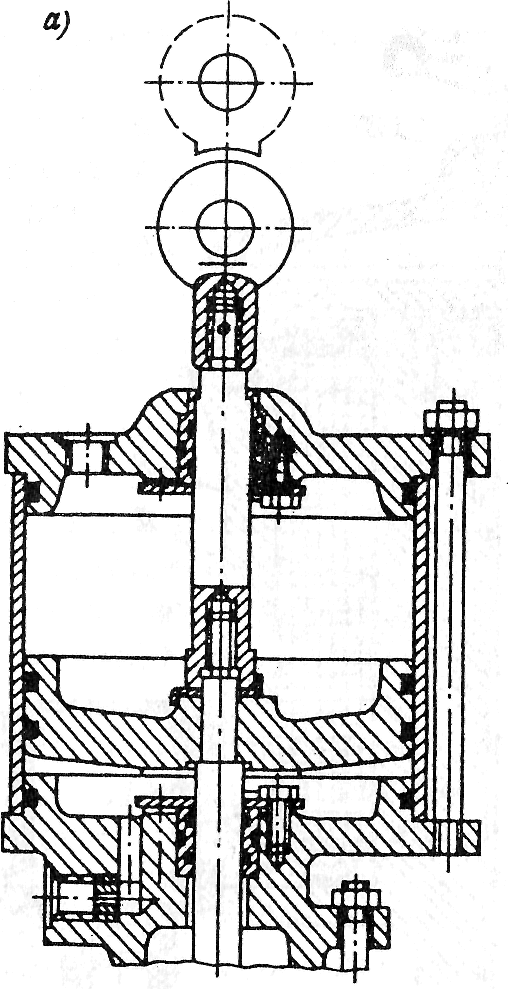
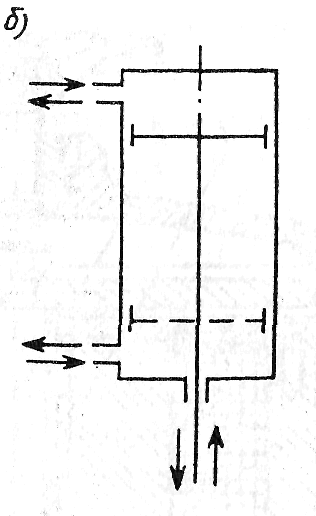
Рис. 5. Поршневой привод прямоходный двустороннего действия:
а – конструкция, б – схема действия
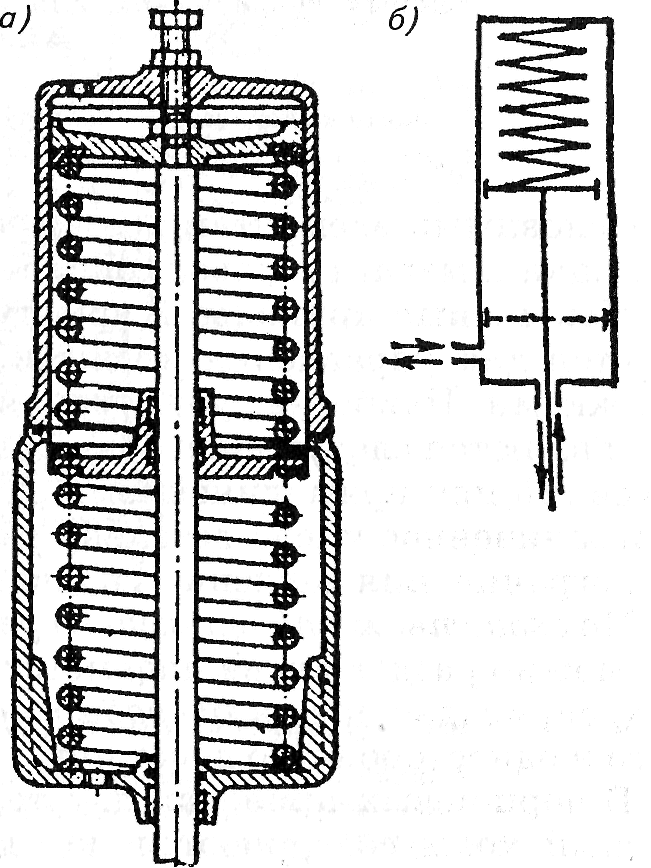
Рис. 6. Поршневой привод прямоходный одностороннего действия:
а - конструкция; б - схема действия
В поворотных поршневых приводах для преобразования поступательного движения поршня во вращательное движение выходного вала применяются рычажная передача, кривошипно-шатунный механизм, реечно-зубчатая передача (рис. 7) и винтовой преобразователь (рис. 8).
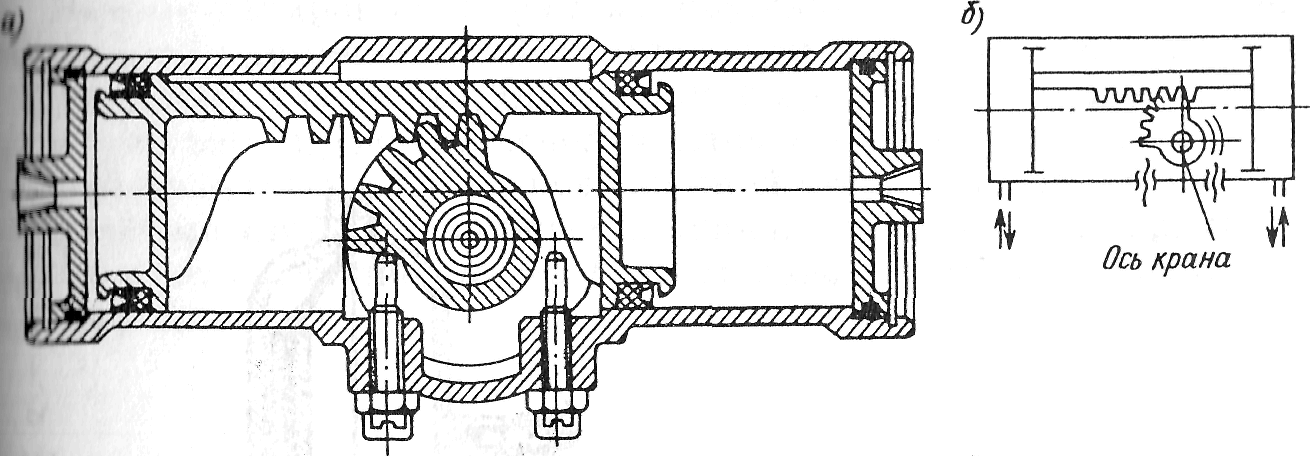
Рис. 7. Поршневой привод поворотный двустороннего действия с реечно-зубчатой передачей: а — конструкция; б — схема действия
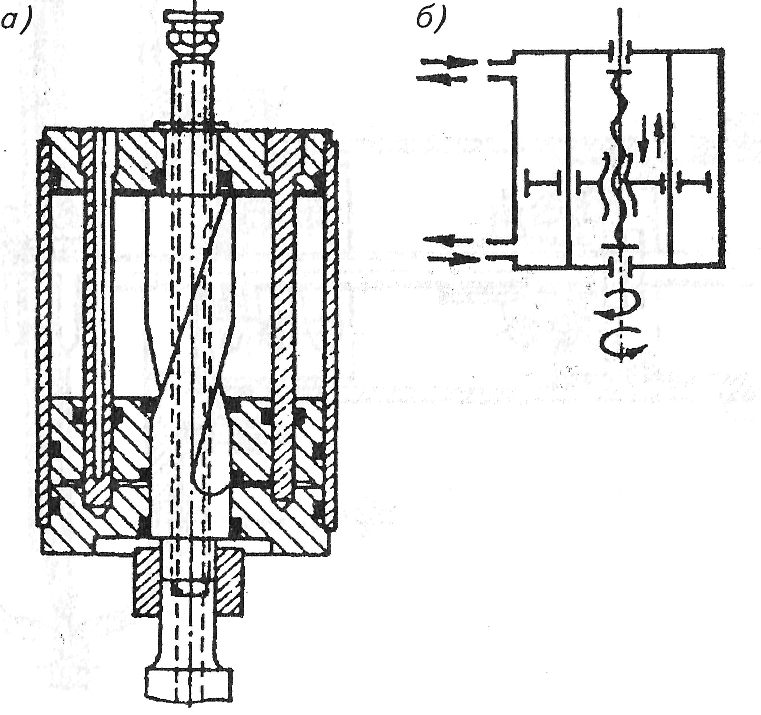
Рис. 8. Поршневой привод двустороннего
действия с винтовым преобразователем:
а — конструкция; б — схема действия
Мембранные приводы. Мембранный привод представляет собой устройство, в котором движение ведомому звену передается под действием давления газа или жидкости на упругую (эластичную) мембрану из резины, полиэтилена, фторопласта или металла.
Наиболее широко мембранный пружинный привод с резиновой мембраной применяется в регулирующей арматуре, а именно в регулирующих клапанах. Для запорной арматуры и для двухпозиционного регулирования используются мембранно-пружинные исполнительные механизмы повышенной мощности (рис. 9).
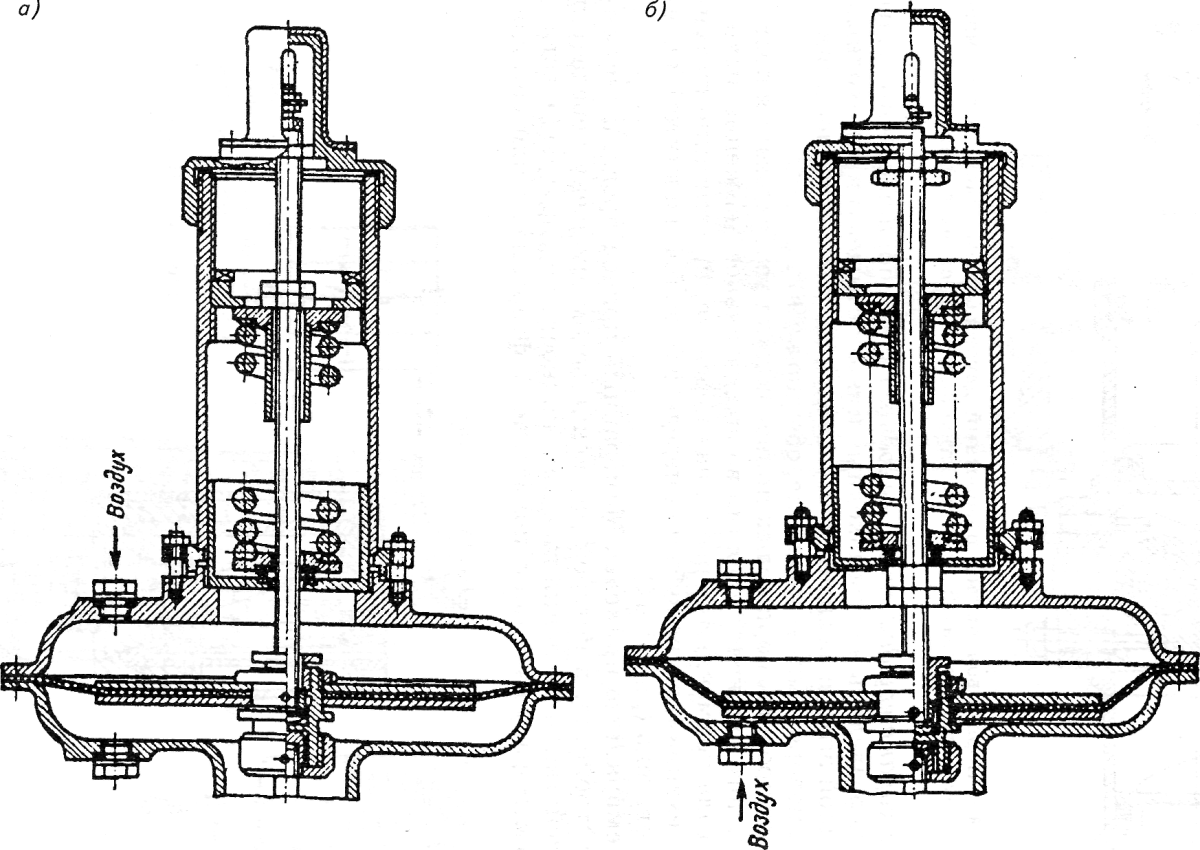
Рис. 9. Мембранный привод с перенастраиваемой пружиной:
а — вид действия НО; б — вид действия НЗ








