 2015-05-12
2015-05-12 910
910Цель работы
1.1 Исследование характеристик двигателя постоянного тока независимого возбуждения в тормозных режимах работы
Программа работы
2.1 Собрать схему для снятия характеристик тормозных режимов ДПТ
2.2 Снять характеристику при рекуперативном торможении
2.3 Снять несколько характеристик торможения противовключением
2.4 Снять схему для исследования динамического торможения ДПТ
2.5 Провести обработку экспериментальных данных, составить отчет и сделать заключение по работе
Приборы и оборудование
В лабораторной работе используются следующие модули:
- модуль питания стенда (МПС);
- модуль питания (МП);
- модуль добавочных сопротивлений №2 (МДС2);
- силовой модуль (СМ);
- модуль тиристорного преобразователя (ТП);
- модуль тиристорного преобразователя (ТП);
- модуль преобразователя частоты (ПЧ);
- модуль ввода/вывода (МВВ).
4.1 Перед проведением лабораторной работы необходимо привести модули в исходное состояние:
- переключатель SA1 модуля МДС2 установить в положение «∞»;
- кнопку «Сеть» модуля ТП, переключатели SA4, SA6 перевести в нижнее положение, переключатель SA3 перевести в положение «Руч», установить режим регулирования скорости ТП (Приложение Б);
- переключатель SA1 модуля ПЧ перевести в среднее положение, SA1 – в нижнее положение, потенциометр RP1 установить в крайнее положение против часовой стрелки.
4.2 Рекуперативное торможение ДПТ
Рекуперативное торможение двигателя постоянного тока представляет собой способ торможения, при котором энергия торможения отдается обратно в источник питания. В данном случае в качестве источника питания выступает тиристорный преобразователь, который отдает рекуперированную энергию в сеть.
Рекуперативное торможение возможно только в случае, когда частота вращения двигателя превосходит частоту вращения на холостом ходу. При этом ЭДС двигателя оказывается больше ЭДС источника.
Схема для снятия характеристики рекуперативного торможения представлена на рисунке 1.
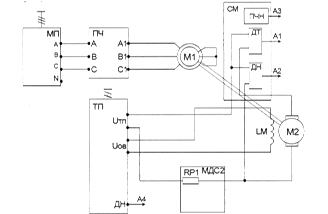
Рисунок 1 – Схема для исследования двигателя независимого возбуждения
Порядок проведения опыта:
- включением автоматических выключателей QF1, QF2 модулей питания стенда и питания подать напряжение на необходимые элементы стенда;
- перевести переключатель SA1 МДС2 в положение «0»;
- включить кнопку «Сеть» ТП;
- подав разрешение на работу ТП, установить выходное напряжение на уровне
120... 150 В;
- выбрав необходимое направление вращения ПЧ, задать момент нагрузки. Если частота вращения ДПТ уменьшается, изменить направление вращения ПЧ (SA1 модуля ПЧ);
- увеличивая момент, снять несколько точек в режиме рекуперации ДПТ, фиксируя необходимые величины в таблице 1. Рекомендуется зафиксировать также точку холостого хода ДПТ и точку перехода в генераторный режим.
Таблица 1 – Данные опыта
| UЯ,В | ||||||
| IЯ,А | ||||||
| n, об/мин | ||||||
| ω, 1/с | ||||||
| РЯ, Вт | ||||||
| ΔРЯ, Вт | ||||||
| РВ, Вт | ||||||
| М, Н•м | ||||||
| ηДПТ |
Расчетные данные.
Частота вращения двигателя,1/с:  .
.
Выходная мощность тиристорного преобразователя, Вт: Ря=Uя·Iя.
Электрические потери в обмотке якоря, Вт: ΔPя=Iя2·rя,
где rя – сопротивление якорной цепи ДПТ (Приложение В), Ом.
Мощность на валу ДПТ, Вт: РВ=Ря – ΔPя – ΔPмех.ДПТ,
где ΔPмех.ДПТ – механическое потери ДПТ (Приложение), Вт.
Момент, развиваемый двигателем, Н·м: М=kФ·Iя, 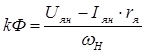 .
.
4.3 Торможение противовключением
Схема для снятия характеристик представлена на рисунке 1.
Порядок проведения опыта:
- включением автоматических выключателей QF1 и QF2 подать напряжение на стенд;
- предварительно установив добавочное сопротивление в цепи якоря ДПТ, включить ТП (кнопка «Сеть»);
- подав разрешение на работу ТП (SA6), установить частоту вращения ДПТ на уровне 350...400 об/мин;
- разрешить работу ПЧ (SA3) и, задав переключателем SA1 модуля направление вращения асинхронного двигателя, изменять момент нагрузки потенциометром RPT модуля. Если частота вращения увеличивается, поменять направление вращения АДКЗ;
- плавно задавая нагрузку, снять механическую характеристику ДПТ, при этом зафиксировав точку короткого замыкания (UЯ > 0, МВ > 0, ω = 0), а также несколько точек режима противовключения. Данные занести в таблицу 2.
Таблица 2 – Данные опыта
| RДОБ= | ||||||
| UТП, В | ||||||
| UЯ, В | ||||||
| IЯ, А | ||||||
| n, об/мин | ||||||
| ω, 1/с | ||||||
| РТП, Вт | ||||||
| РЯ, Вт | ||||||
| ΔРЯ, Вт | ||||||
| ΔРДОБ, Вт | ||||||
| РВ, Вт | ||||||
| М, Н•м | ||||||
| ηДПТ |
Расчётные данные.
Выходная мощность тиристорного преобразователя, Вт: РТП=UТП·IЯ.
Потери в добавочном сопротивлении, Вт: ΔPДОБ=IЯ2·RДОБ.
4.4 Динамическое торможение
Порядок проведения опыта:
- установив по указанию преподавателя добавочное сопротивление в цепи якоря ДПТ, подать напряжение на стенд включением автоматических выключателей QF1 (МПС), QF2 (МП);
- задав переключателем SA1 модуля ПЧ направление вращения асинхронного двигателя, изменять частоту вращения потенциометром RP1 модуля;
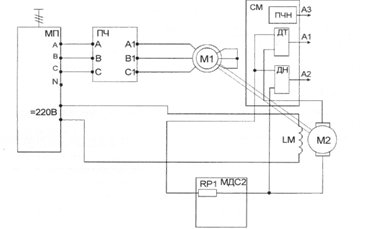
Рисунок 2 – Схема для снятия характеристик динамического торможения
- плавно задавая нагрузку, снять механическую характеристику ДПТ при вращении вперед и назад. Ограничение по току якоря: IЯ < 1,5 А. Данные занести в таблицу 3.
- повторить опыт для другого значения сопротивления в якорной цепи, а также для нулевого значения сопротивления (SA1 МДС2 перевести в положение «0»).
Таблица 3 – Данные опыта
| RДОБ= | ||||||
| UЯ,в | ||||||
| IЯ,А | ||||||
| n, об/мин | ||||||
| ω, 1/с | ||||||
| РЯ, Вт | ||||||
| ΔРя, Вт | ||||||
| ΔРдоб, Вт | ||||||
| РВ, Вт | ||||||
| М, Н·м |
Для осциллографирования переходных процессов необходимо собрать схему, представленную на рисунке 3. Перед проведением опыта перевести ТП в режим регулирования скорости (Приложение Б).
Рисунок 3 – Схема для снятия переходных процессов
Для снятия переходных процессов рекуперативного торможения необходимо:
- включить автоматический выключатель модуля питания стенда QF 1;
- включить кнопку «Сеть» модуля ТП и подать разрешение на работу SA6;
- выбрав направление вращения ДПТ установить потенциометром RP1 частоту вращения на уровне 400...500 об/мин, затем остановить двигатель переведением SA5 в среднее положение. Положение потенциометра не менять;
- выбрав в программе Labdrive масштаб по времени, равный 3 с, произвести пуск/торможение, а затем реверс/торможение ДПТ с помощью переключателя SA5, фиксируя переходный процесс на экране ПК;
- по окончании опыта снять разрешение на работу ТП (SA6).
Обработка результатов опыта заключается в построении фазовой траектории n = f(Iя) в программной оболочке LabShow. На фазовой траектории необходимо указать зоны рекуперативного торможения, двигательного режима.
4.6 Обработка результатов
После проведения опытов необходимо рассчитать необходимые величины, указанные в таблицах, а также построить механические ω = f(M) и электромеханические характеристики ω = f(IЯ). Также необходимо построить энергетические диаграммы для следующих режимов работы:
- холостой ход; двигательный режим; идеальный холостой ход; рекуперативное торможение; точка короткого замыкания; торможение противовключением; динамическое торможение введением RДТ; динамическое торможение при RДТ = 0.
Энергетические диаграммы представляют собой графическое отображение распределения потерь и показывают направление потоков мощностей в электроприводе. Направление потоков мощностей показывается стрелками с указанием величин потерь. Примерный вид диаграммы для двигательного режима представлен на рисунке 4.
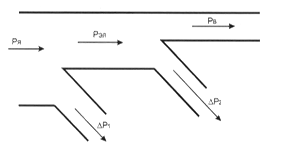
Рисунок 4 – Энергетическая диаграмма ДПТ для двигательного режима
Контрольные вопросы
5.1 Какой из видов торможения ДПТ наиболее оптимален в энергетическом отношении, какой наименее оптимален?
5.2 Какой вид торможения обеспечивает точную остановку электропривода с реактивным статическим моментом на валу?
5.3 Возможно ли динамическое торможение ДПТ параллельного возбуждения и если да, то эффективно ли оно?
5.4 Для каких режимов торможения понятие КПД неприменимо?
Вывод:








