 2015-06-28
2015-06-28 534
534Лабораторна робота №3
Команда проведення розрахунків математичних та тригонометричних виразів (CAL) системи AUTOCAD
Теоретичні відомості.
Синтаксис визначеним
Команда CAL оцінює визначення відповідно до стандартних математичних правил старшинства:
> Визначення в круглих дужках спочатку, старт із самим внутрішнім набором.
> Оператори в стандартному порядку: показники ступеня спочатку, множення і ділення другий, додавання і віднімання остання.
> Оператори рівного старшинства ліворуч праворуч.
Числові визначення - реальні цілі числі і функції, об'єднані з операторами знаходження:
Оператор Операція
() Вираження Groups
А Указує зведення в ступінь
*, / Множить, ділить
+, - додають, віднімають
Приклади знаходження числових виражень:
3+0,6 (5.8Л2) +РІ
Векторні вираження
Векторне вираження - сукуішість точок, векторів, чисел, функції, об'єднані з
операторами знаходження:
Оператор Операція
() Вираження Groups
& Визначає векторний добуток векторів (як вектор)
[a,b,c]&[x,y,z] = [ (b*z) - (с*у), (с*х) - (a*z), (а*у) - (Ь*х) ]
* Визначає скалярний добуток векторів (як реальне число)
[a,b,c]*[x,y,z] = ах + by + cz
*,/ МЕЮЖИТЬ, ділить шкгор реальним числом
a*[x,y,z] = [а*х, а*у, a*z]
+, - Додають, віднімають вектори (точки)
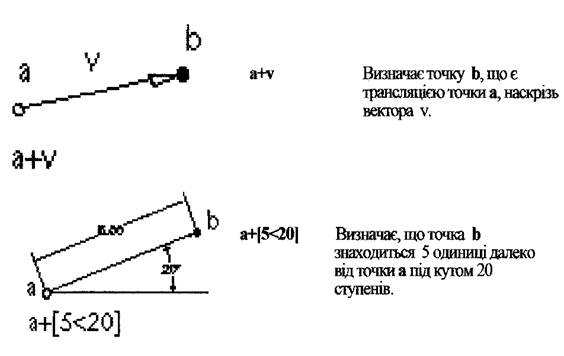
[а,b,с] + [x,y,z] = [а+х, b+y, c+z] Приклади знаходження векторних виразів: А+ [1,2,3] постачає, точка установлена [1,2,3] одиниці щодо точки А
Вираження: [ 2 < 45 < 45] + [2 < 45 < 0] - [1.02,3.5,2]
Додають дві точки і віднімають третю точку. Перш дві точки розташовані в сферичних координатах.
2. Формат КУТІВ
Задані одиниці для кутів є десяткові ступені. Необхідно ввести використовуючи кути в наступному форматі:
degdmin'sec"
Повинно ввести 0 і d(0d) при введенні кута, що є меніш ніж 1 ступінь (тільки хвилини і секунди). Можна опустити хвилини або секунди, якщо вони нульові. Щоб ввести кути в радіанах, необхідно ввести номер і послідовний r. Щоб ввеста кути в градусах, необхідно ввести номер і послідовний g.
Наступні приклади показують шляхи введення кутів:
124.6r
14g
5dl0'20"
OdlO'20"
Кути, введені в будь-який формат перетворені до десяткових ступенів.
РІ радіан рівний 180, і 100 радіан рівний 90 градусом.
3. Точки та вектори.
Точки і вектори - пари або набір трьох реальних чисел. Точка визначає розташування в місці (просторі), а вектор визначає напрямок (або трансляція) у місці (просторі).
Деякі функції CAL, типу pld і plt, повертають точку. Інші функції, типу nor і vec, повертають вектор.
Форміат Точок і Векторів
Точка або вектор - набір трьох реальних виразів, прикладених у квадратних дужках([]):
[r1, r2, r3]
Системи позначень р 1, р2, і т. д визначають точки Система позначень vl, v2 і. т. д. визначає вектори. На малюнках точки відображені як точки, а вектори відображені, як лінії зі стрільцями
Команда CAL підтримує точки, виражені у всіх форматах AutoCAD.
Системи координат Формат точки
Полярний [dist < кут]
Циліндричний [dist < кут, z]
Сферичний [dist < кут 1< кут 2]
Відносний використовує @ префікс [ @ х, у, z]
WCS (замість UCS) використовує * префікс [* x,y,z]
У наступному прикладі, точка введена у відносну сферичну систему координат. Відстань 1+2=3; кути 10+20=30 ступеня і 45 ступенів, 20 хвилину.
Знаходження правильну точку, що містить арифметичні вирази як її компоненти: [2*(1.0+3.3), 0.4-1.1, 2*1.4]
4. Використання AutoLISP змінної.
AutoLISP можна використовувати міняючи в межах арифметичних виразів. Змінна повинна бути одна з наступних типів: реальна, цілочисленна, двовимірна (2D) або тривимірна точка (вектор) (3D).
Цей приклад визначає точку, що знаходиться 5 одиниць у напрямку X і 1 одиниць у напрямку Y, точка збережена в AutoLISP змінна А.
А+[5,1]
Якщо ми використовуємо змінну AutoLISP з назвою, що містить символ зі спеціальним значенням у CAL типу +,-,*, або /, замикаємо ім'я змінної в апострофах 0, наприклад:
'niimbеr-ot-holes'
Визначення цінність до AutoLISP змінної
Щоб визначати цінність до AutoLISP змінної, необхідно надати в арифметичному вираженню ім'я змінної і знак дорівнює.(=). Пізніше уже можна використовувати цінність цієї змінної" для інших обчислень.
Цей приклад зберігає цінність двох виражень в AutoLISP змінні Р1 і R1.
Command: cal
>> Expression: Pl=cen+[1,0]
» Select object for CEN snap: вибір коло або дугу
Command: cal
» Expression: R1=dist(end,end)/3
Цей приклад використовує цінність змінних Р1 і R1:
Command: circle
3P/2P/TTR/<Centerpoint>: 'cal
» Expression: P1 +[ 0,1]
Diameter/<Radius>: 'cal
» Expression: R1+0.5
5. Використання змінної, Системи AutoCAD.
За допомогою використання функцію getvar в AutoLISP можна читати цінність змінної, системи AutoCAD.
Синтаксис функції getvar:
getvar (variable_name) getvar (змінна_ім'я)
Наступний приклад використовує getvar, щоб одержати точку, що є центром представлення:
с = getvar (viewctr)
6. Перетворення одиниць виміру.
Функція cvunit перетворює номер або точку від однієї одиниці виміру до іншого. В файлі з іменем support/acad.unt знаходиться список одиниці, що можуть бути перетворені. Синтаксис функції:
cvunit (value, from_unit, to_uuit)
Наступний приклад перетворює значення від дюймів до сашиметрів:
Cvunit (1, inch, cm)
7. Стандартні числові функції.
CAL підгримує наступні стандартні числові функції:
| Функція | Опис |
| sin (кут) | Синус кута |
| cos(кут) | Косинус кута |
| tang (кут) | Тангенс кута |
| asm (реальний) | Арксинус номера; номер повинний бути між -1 і 1 |
| acos (реальний) | Арккосинус номера;номер повинний бути між -1 і 1 |
| atan (реальний) | Арктангенс номера |
| In (реальний) | Натуральний логарифм реєстрації номера |
| log (реальна) | Логарифм основою 10 реєстраційний з номера |
| ехр (реальний) | Натуральний показник номера |
| ехр10 (реальний) | Базується 10 показника ступеня номера |
| sqr (реальний) | Квадрат (площа) номера |
| Квадратний корінь номера; номер повинен бути ненегативний | |
| abs (реальне) | Абсолютне значення номера |
| round (реальний) | Номер, округлий до найближчого цілого числа |
| trunc (реальний) | Цiлочисленна частина номера |
| r2d(кут) | Кути в радіанах перетворюють до ступенів; наприклад, r2d перетворює постійну рі в 180 ступенів |
| d2r(кут) | Кути в ступенях перетворюють до радіанів; наприклад, d2r (180) перетворює 180 ступенів у радіани і повернення значення константи рі |
| pі | Постійна рі |
8. Обчислення вектора від двох точок.
Функції vec і vec 1 обчислюють вектор від двох точок.
vec(p1,p2) Постачає вектор від точки рі до точки р2
vec1(pl,p2) Постачає одиничний вектор від точки рі до точки р2
Наступний приклад використовує CAL, щоб перемістити вибрані об'єкти три одиниці в напрямок від центра одного вибраного кола до центра іншого вибраного кола:
Command: move
Select objects
Base point or displacemenf:'cal
» Expression: 3*vecl(cen,cen)
Second point of displacement:
Наступні приклади пояснюють значення вектора і обчислення точки:
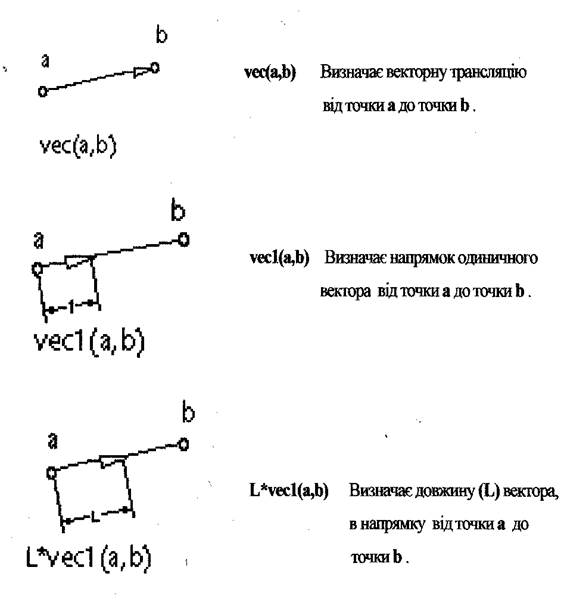
9. Обчислення довжину вектора.
Функція abs обчислює довжину вектора.
abs(v) Обчислює довжину вектора v, ненегативного реального числа. У
сферичних координатах функція (dist<ang<ang), dist є довжиною вектора.
10. Snap режим в системи AutoCAD.
Ми можемо використовувати Snap режими в системи AutoCAD, як частини арифметичних виражень. AutoCAD запитує вибирати об'єкт і повернення координати. Використання арифметичних виразів з Snap режимами значно спрощує введення координат щодо інших об'єктів.
Коли ми використовуємо щ" режими, треба ввести тільки три символьні назви.
Скорочення
Snap режими Snap режим
END Кінцева точка
INS Вставка мережної інформаційної системи
INT Перетинання
МID Середина
CEN Центр
NEA Найближчий
NOD Вершина уклону
QUA У якості сектору
PER У перпендикулярі
TAN Тангенс
Наступний приклад використовує Snap режим кінцевої точки, щоб обчислити центроїду трикутника, визначеного трьома кінцевими точками: (end+end+end)/3
11. Перетворення точок між UCS і WCS.
Звичайно, усі коордищти були відповщними що до поточної UCS. Наступні функції перетворюють точки між UCS i WCS..
Функція Опис
w2u(pl) Перетворює р1 точку із WCS в UCS
u2w(pl) Перетворює р1 точку із UCS в WCS.
Можна використовувати w2u, щоб знайти початок координат в умовах поточних UCS.
w2u([0,0,0])
Фільтрування X, Y і Z компоненти точки або вектора
Наступні функції фільтрують X, Y і Z компоненти точки або вектора:
Функція Опис
xyof(pl) X і Y компоненти точки. Компонент Z прирівняний до 0.0.
xzof(pl) X і Z компоненти точки. Компонент Y прирівняний до 0.0.
yzof(pl) Y і Z компоненти точки. Компонент X прирівняний до 0.0.
хоf(р1) X компонент точки.Y і Z компоненти прирівняний до 0.0.
yoflfpl) Y компонент точки. X і Z компоненти прирівняний до 0.0.
zof(pl) Z компонент точки. X і Y компоненти прирівняний до 0.0.
rхоf(р1) X компонент точки.
ryof(p1) Y компонент точки.
rzof(p1) Z компонент точки.
Наступний приклад постачає Z компонент точки, вираженої в сферичних координатах: zof([2<45<451)
12. Обчислення точки на лінії.
Функції pit і рИ повергають точку на даній лінії. Позиція точки на лінії може бути визначена або її відстанню від першої точки або параметром t.
p1d(pl,p2,dist) Обчислює точку на лінії, що пропускає р1 і р2 точки.. Параметр dist визначає відстань точки вiд точки р1.
р1t(р1,p2,t) Обчислює точку на лінії, що пропускає р1 і р2 точки. Параметр t визначає параметричну позицію точки на лінію. Наступні приклади показують знаходження параметра t Якщо t=0, точка єрі.
якщо t=0.5 точка знаходиться між р1 і р2. якщо t=1 точка є р2.
13. Обертання точки навколо осі.
rot(p,origin,ang) Обертає точку р через кут, навколо осі Z
Функція rot повертає точку, що оберталася навколо осі
rot(p,origin,ang) Обертає точку р через кут, навколо осі Z
rot(р,AхР1,AxP2,ang) Обертає точку р через кут, відносно осі, що пропускає точки АхРІ і АхР2. Вісь орієнтується від першої точки до другої точки.
14. Одержання точки перетинання.
Функції illp визначають точки перетинання.
ill(р1,р2,р3,р4) Визначає точку перетинання між двома лініями
(p1,p2) і (рЗ,р4).Усі точки вважаються у трьох
вимірах. illр(р1,р2,р3,р4,р5) Визначає точку перетинання мiж лініям (p1,p2) і площинам, що пропускає три точки (р3,р4,р5).
15, Обчислення відстані (Distance).
dist(pl,p2) Визначає відстань між двома точками р1 і р2.
dpl(p,pl,p2) Визначає найкоротшу відстань між точкою р і лінією, що пропускає точки р1 і р2.
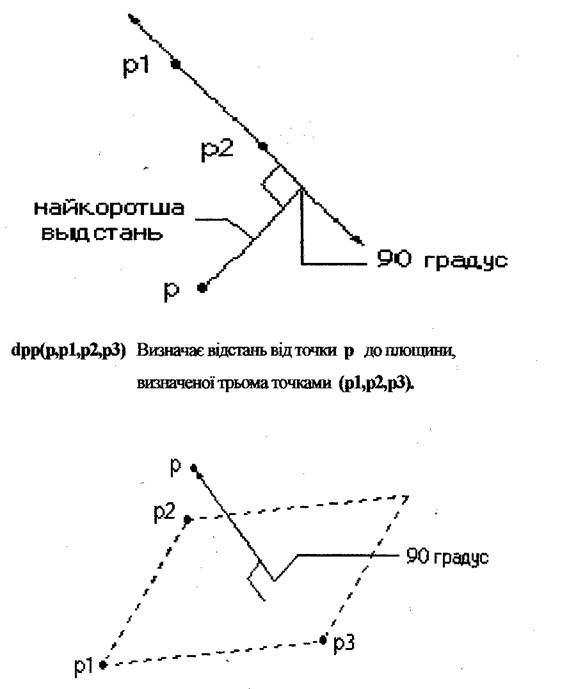
Наступний приклад визначає відстань між точками 3,2,4 і площиною, що визначена трьома кінцевими точками: dpp([3,2,4),end, end, end)
6. Одержання радіуса.
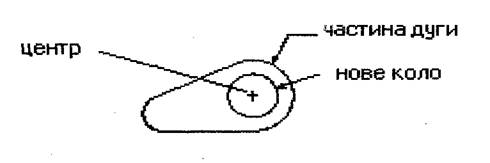
Функція rad визначає радіус вибраного об'єкта.
rad Визначає радіус вибраного об'єкта. Об'єкт може бути коло, дуга або двовимірна (2D) ламана лінія (частина дуги).
Наступний приклад використовує rad з командою CIRCLE. Радіус нового кола дві третини радіуса вибраного частини дуги ламаної лінії:
Command: circle
3Р / 2Р / TTR / <Center point>: cen
Вибору коло
Diameter / <Radius>: 'cal
» Вираження: 2/3*rad
» Вибрати коло, дугу або сегмент ламаної лінії для функції RAD: Select the circle (виберіть коло)
17.0держання кута.
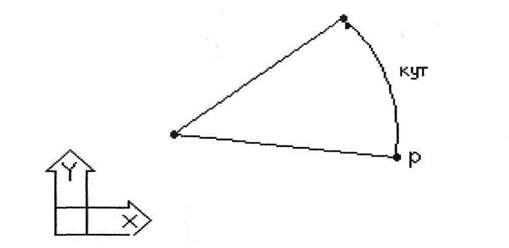
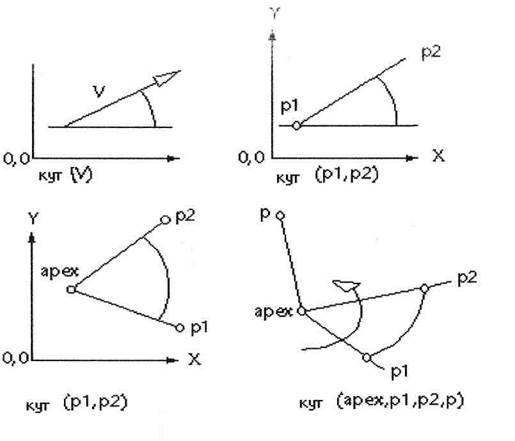
Функція ang визначає кут між двома лініями. Кути вимірюють проти годинникової стрілки або відносно осі X у двовимірному випадку, або до визначеної осі, у випадку трьох вимірів.
ang(v) Визначає кут між віссю X і вектором v. Вектору вважається двовимірним (2D), проектується на XY кофдинатній площині.
ang(p1,p2) Визначає кут між віссю X і лінією (рІ,р2), який визначається від точки р1 до точки р2. Точки вважаються двовимірними (2D), проектуються на
XY координатній площині.
ang(apex,pl,p2) Визначає кут між лініями (apex, p1) і (арех,р2).Точки вважаються двовимірними (2D), проектуються на XY координатній площині.
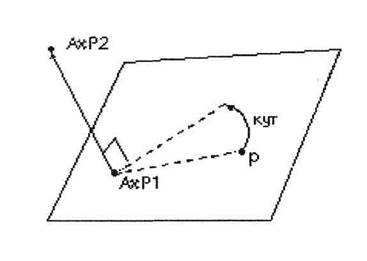
ang(apex,pl,p2,p) Визначає кут між лініями (apex, p1) і
(apex, p2). Лінії вважаються тривимірними (3D). Останній параметр р, використовується для визначення орієнтації кута. Кут вимірюваний проти годинникової стрілки. Наступні приклади показують, як вимірюються кути:
Можна визначати кут між двома сторонами трикутника, використовуючи функцію ang, як показано в наступному прикладі:
Command: cal
» Вираз: ang(end,end,end)
Після задання виразу треба вибрати вершину кута. Тоді необхідно вибрати дві протилежні вершини.
18. Обчислення нормального вектора.
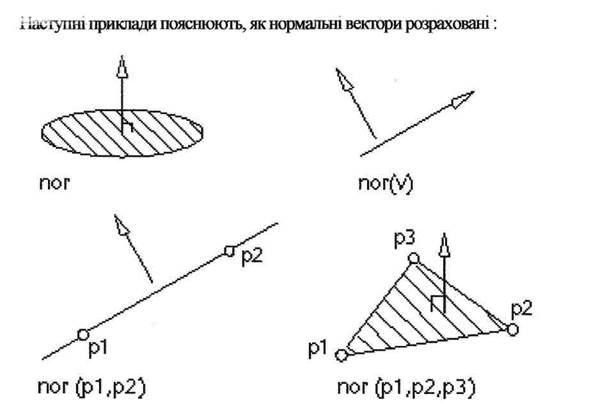
Функція nor обчислює орт нормального вектора (векторний перпендикуляр до лінії або площини). Nor функція обчислює одиничний вектор, не точку. Вектор визначає напрямок нормалі, а не розтангування в просторі Можна додавати цей нормальний вектор до точки, щоб одержати іншу точку.
nor Визначає трьохвимірний орт нормалі вибраного кола, дуги.
Цей нормальний вектор координата Z в об'єктній системі координат (OCS - Object Coordinate System) вибраного об'єкта.
nor(v) Визначає двовимірний орт нормального вектора до вектора v. Обидва вектори вважаються двовимрними, проектуються на ХУ координатній площині.
Орієнтація наступного нормального вектора такий, що вказує ліворуч від вектора v.
nor(p1,p2) Визначає двовимірний орт нормалі до лінії р1, р2. Лінія орієнтується від р1 до р2. Орієнтація наступного нормального вектора така, що вказує ліворуч від лінії (p1,p2).
nor (p1, р2, рЗ) Визначає тривимфний орт нормалі до площини, визначеної трьома точками р1, р2 і р3. Орієнтація нормалі така, що дані точки йдуть проти годинникової стрілки до нормалі
Наступний приклад встановлює перпендикуляр напрямку до вибраного об'єкта Цей об'єкт відображений у виді зверху І не перекручений паралельною проекцією.
Command: v point
Rotate/<View poiin> <0.0000,0.0000,1.0000>: cal
» вираз: nor
» Вибір коло, дугу або ламану лінію для функції NOR.
19. Короткі функції.
Наступні короткі функції використовують для звичайних виразів. Ці функції комбінуються деякими з попередніх визначених функцій і SNAP режимів кінцевої точки:
Функція Скорочення Опис
dee dist(end,end) Відстань між двома кінцевими
точками
ille ill(end,end,end,end) Перетинання двох ліній, визначені
чотирма кінцевими точками.
мее (end+end)/2 Середня точка між двома
кінцевими точками.
nee nor(end,end) Одиничний вектор на XY
координатній площині і нормаль до двох кінцевих точок
vee vec(end,end) Вектор від двох кінцевих точок
vee1 vecl(end,end) Одиничний вектор від двох
кінцевих точок.
Дійсне число може бути любим додатним або відємним числом. Надрукуйте в командній строці яке-небудь велике ціле число(без десяткових точок). AutoCAD вимагатиме, щоб це число належало діапазону від -32768 до +32767.
6. Використання спеціальних функцій команди CAL
Команда CAL володіє спеціальними функціями. В табл. 2 приведені ці функції та їх призначення.
| Функція | Описання |
| Rad | Повертає радіус виділеного об"єкта |
| сur | Повідомляє вказану вами точку |
| ® | Повертає точку, яка розраховувалась останньою |
| Vec(pl,p2) | Обчислює вектор з точки р1 до точки р2 |
| Vecl(pl,p2) | Обчислює одиничний вектор з точки р1 до точки р2 |
| pld(pl,p2,d) | Визначає точку на відрізку, що з"єднує точки р1 та р2. Визначаєма точка знаходиться на відстані d одиниць від точки р1. |
| plt(pl,p2,t) | Визначає точку на відрізку, що з"єднує точки р1 та р2. Визначаєма точка ділить відрізок в співвідношенні t, починаючи від точки р1. |
| Dist(pl,p2) | Вираховується відстань між точками р1 тар2 |
| Dpl(p,pl,p2) | Вираховується відстань від точки р до відрізка, що проходить через точки р1 та р2 |
| Ang (p1, p2) | Вираховується кут між віссю абсцис х та лінією, що проходить через точки р1 та р2 |
| Aug (v) | Вираховується кут між віссю абсцис х та заданим вектором |
| Ang (a, p1, p2) | Вираховується кут між відрізками, один з яких з"єднує точки а та р1, а інший - а та р2 |
| Ill(pl,p2,p3,p4) | Визначає точку пересічення двох відрізків: один відрізок з"єднує точки р1 та р2, а інший - а другий рЗ та р4 |
Вектор - це направлений відрізок. Він виражається через прирощення координат delta x та delta у.
Необхідно мати на увазі, що точки в цих функціях можна завдавати багатьма способами. Найбільш поширеним являється використання об'єктних прив"язок.
Таблиця 1.1. Комбінації «швидких клавіш»
| Комбінац ія клавіш | Додат кові клавіш: і | Дія системи | Установки по умовчанню | Команда або змінна |
| Ctrl + В | F9 | Включення/ виключення режиму кроку | Off | SNAP |
| Ctri+C | буфер обміну Windows | COPYCUP | ||
| Ctri+D | F6 | Включення/ виключення режиму висновку в ря док стану Коирдинат курсора | On | COORDS |
| Ctn+F | FЗ | Включення / виключення OSNAP | Off | OSNAP |
| Ctrl+G | F7 | Включення/ виключення режиму сітки | Off | GRID |
| Ctrl+J | Enter | Повторення останньої команди | ||
| Ctrl + L | F8 | Включення/ виключення режиму ORTHO | Off | ORTHO |
| Ctrl + N | Відкриття діалогового вікна створення нового | NEW | ||
| Ctri+O | Відкриття діалогового вікна вибір раніше твореного креслення | On | OPEN |
Таблиця 1.2. Опції команд об'єктної прив'язки
| Опція | Дія системи |
| Endpoint • | Прив'язка до найближчої кінцевої точки лінії або дуги мультилинии, межі області і тривимірного тіла |
| Midpoint | Середня точка таких об'єктів, як лінія, дуга, |
| Center • | Центр кола, дуга або еліпса |
| Node | Прив'язка до точкового елемента |
| Quadrant | Прив'язка до найближчої точки квадранта на дузі, кола або еліпсі |
| Intersection | Перетин двох ліній, лінії з дугою або колом двох кіл и/или дуг, сплайнов, меж області |
| Extension | Нова функція прив'язки до продовжень об'єктів. Допомагає користувачу будувати об'єкти, спираючись на лінії |
| Insertion | Прив'язка до точки вставки тексту, атрибута, форми X визначення атрибута або блоку |
| Perpendieul * ar | Прив'язка до крапки на лінії, кола, еліпсі, сплайне або дузі, яка утворює спільно з останньою крапкою нормаль до цього об'єкту |
| Tangent * Nearest • | Прив'язка до крапки на колі або дузі, яка при з'єднанні з останньою крапкою утворює дотичну |
| Прив'язка до крапки на лінії, дузі або колі, яке є найближчою до позиції перехрестя | |
| Опція | Дія системи |
| Apparent Intersection *B | Прив'язка до точки уявного перетину |
| ParallelЭ.Д. | Нова функція прив'язки об'єктів до паралелей, що розширює можливості побудови об'єктів, паралельних існуючим |








