 2015-07-03
2015-07-03 4197
4197Исполнительные механизмы предназначены для преобразования изменений давления воздуха Р на выходе регулятора в перемещение h регулирующего -органа - клапана, заслонки, шибера, крана и т. п. Регулирующий орган изменяет расход потока жидкости, газа, пара и т.п. вводимого в объект управления, и тем самым вызывает изменение регулируемой выходной координаты. По типу привода пневматические исполнительные механизмы делятся на мембранные и поршневые.
Мембранный исполнительный механизм
Схема мембранного исполнительного механизма (МИМа) показана на рис. 2.1, а. Перемещение выходного штока 2, соединенного с регулирующим органом, в одну сторону осуществляется силой, которая создается давлением Р, в другую - усилием пружины 3. Сигнал Р поступает в герметичную мембранную «головку», в которой находится мембрана из прорезиненной ткани толщиной 2-4 мм с жестким центром. Снизу на мембрану давит пружина 3. МИМы классифицируют, по размерам мембранных «головок». МИМы поставляются обычно совместно с регулирующими органами. Так как при снятии давления Р мембрана всегда перемещается вверх, то в зависимости от конструкции регулирующего органа различают нормально открытые и нормально закрытые клапаны.
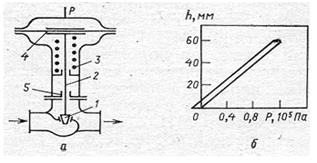
Рис.2.1. Мембранный исполнительный механизм:
а - принципиальная схема, б - статическая характеристика
1 - регулирующий орган; 2 - шток; 3 - пружина; 4 - мембрана; 5 - сальник.
Статические характеристики большинства МИМов близки к линейным (рис.2.1,6), однако они обладают зоной гистерезиса, составляющей 2—15% от наибольшего значения Р. Эта величина зависит от усилий трения в сальнике 5, от перепада давлений на регулирующем органе, от характеристик пружины и эффективной площади мембраны. Перемещения штока h в среднем достигают 50 - 70мм, поэтому эффективная площадь Рэ мембраны зависит от Н. По мере возрастания Рэ зона гистерезиса уменьшается до 2—3% и практически не влияет на качество переходных процессов в АСР. Однако при этом возрастает объем надмембранной камеры и ухудшаются динамические характеристики цепочки «пневмолиния - МИМ».
Для уменьшения зоны гистерезиса и улучшения динамических характеристик МИМов на исполнительный механизм устанавливают дополнительные усилители мощности, называемые позиционерами. Различают позиционеры, работающие по схеме компенсации перемещений и по схеме компенсации сил; в позиционерах обоих типов МИМ охватывается отрицательной обратной связью по положению штока, что исключает влияние на статические характеристики сил трения в сальнике, перепад давлений на регулирующем органе и т.п. Одновременно с этим увеличение расхода воздуха, подаваемого в МИМ, заметно улучшает динамические характеристики последнего.
Поршневые следящие приводы
Поршневые следящие приводы (ПСП) применяют в тех случаях, когда требуется перемещать шток исполнительного механизма на большое расстояние h (0<=h<=300мм). Для повышения точности и улучшения динамических характеристик поршневые приводы снабжают позиционерами, а сами приводы называют следящими.
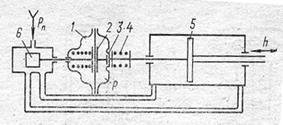
Рис.2.3. Принципиальная схема пневматического поршневого следящего привода:
1 - исполнительный механизм; 2 - большая мембрана; 3 - малая мембрана;
4 - пружина обратной связи; 5 - поршневой механизм; 6 - золотник.
На рис. 2.3 показана принципиальная схема такого следящего поршневого привода. Он состоит из мембранного блока 7 с большой 2 и малой 3 мембранами; золотника 6 с тремя щелями; поршневого механизма 5 и пружины отрицательной обратной связи 4. При увеличении Р золотник смещается влево, и давление питания Рп поступает в левую полость цилиндра 5, перемещая поршень вправо и увеличивая натяжение пружины отрицательной обратной связи до тех пор, пока не наступит равновесие сил, действующих на мембранную систему 2,3. Следящие приводы обладают зоной нечувствительности (не выше 1%), полное время перемещения составляет несколько секунд (при отсутствии нагрузки); в области частот w<wн=0,6 рад/с их можно рассматривать как усилительные звенья.

