 2015-07-03
2015-07-03 1134
1134Автоматическая система регулирования ТОУ, построенная на ПСА, состоит в общем случае (рис. 3.1) из датчика (Д), вторичного прибора (ВП), задатчика (ЗД), пневматического регулятора (ПР), линии связи (ЛС), исполнительного механизма (ИМ) и регулирующего органа (РО). Датчик Д вырабатывает унифицированный пневматический сигнал, пропорциональный значениям координаты у ТОУ; при использовании в АСР датчика с электрическим выходом необходима установка дополнительного электропневмопреобразователя (ЭПП). Пневматический сигнал от Д вводят в регулятор ПР и одновременно - во вторичный показывающий (и регистрирующий) прибор, ВП, снабженный станцией управления СУ для задания автоматического, программного или ручного дистанционного режима работы системы регулирования. Регулятор ПР в соответствии с одним из типовых законов регулирования вырабатывает командный сигнал, поступающий по линии связи (пневмопроводу длиной до 250-300 м) на пневматический мембранный исполнительный механизм.
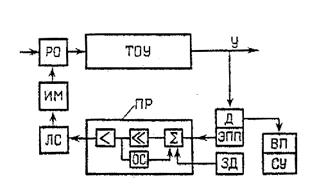
Рис.3.1. Структурная схема пневматической АСР.
В динамическом отношении мембранные ИМ в области частот [0; 0,3] рад/с рассматривают как последовательное соединение апериодического звена с малой (порядка нескольких секунд]) постоянной времени и усилителя с зоной гистерезиса 2-10%. При длине пневмолинии более 100-150 м ИМ оборудуют усилителям мощности и охватывают жесткой отрицательной обратной связью по перемещению РО. При использовании таких позиционеров ИМ притекают за линейное усилительное звено, не влияющее на динамические характеристики пневматического регулятора и всей АСР.








