 2015-07-21
2015-07-21 3074
3074Структурная схема РЛС с частотной модуляцией непрерывного зондирующего сигнала показана на рис.8.3.
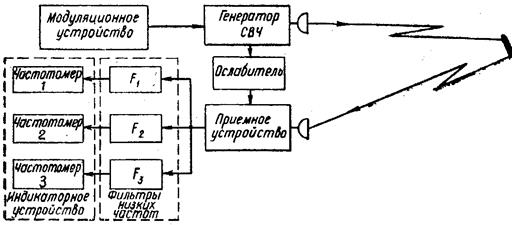
Рис.8.3. Структурная схеме РЛС с частотной модуляцией
непрерывного зондирующего сигнала.
Модулятор передатчика осуществляет частотную модуляцию генератора, изменяя частоту непрерывного зондирующего сигнала от fmin до fmax. На вход приемного устройства поступают зондирующие сигналы c частотой f1 и отраженные от цели сигналы с частотой f2. Отраженные сигналы повторяют закон изменения частоты зондирующих сигналов со сдвигом на время запаздывания tD (рис.8.4,а).
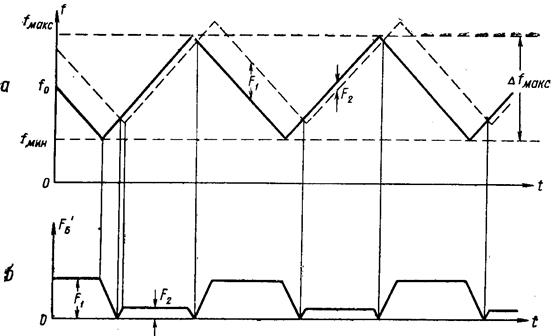
Рис.8.4. Измерение радиальной скорости цели в РЛС
с частотной модуляцией непрерывного зондирующего сигнала:
а – график изменения частоты излучаемого и принимаемого сигналов;
б – график изменения разностной частоты (частоты биений).
В результате сложения зондирующих и отраженных от цели сигналов в смесителе приемника возникают биения с частотой FB = f1 – f2, которая пропорциональна дальности до цели. В результате изменения расстояния между РЛС и целью возникает дополнительная доплеровская составляющая частоты биений FV.
Тогда результирующая частота биений (рис.8.4,б):
F’B = FB ± FV,
где: FB – частота биений, пропорциональная дальности до цели;
FV – частота Доплера, пропорциональная радиальной скорости цели.
На выходе приемного устройства установлены узкополосные фильтры, которые обеспечивают разделение сигналов по радиальной скорости. Измерение радиальной скорости цели осуществляется частотомерами, отградуированными в единицах скорости.
Так как практически всегда выполняется условие FB min ≥ FV max, то:
FB = (F1 + F2)/2
FV = (F1 – F2)/2
Следовательно, измеряя разностные частоты F1 и F2, можно определить дальность и радиальную скорость цели.
Радиальная скорость цели:
Vr =  =
=  ,
,
где: f0 = (fmax + fmin)/2 – средняя частота передатчика.
Достоинства частотного метода непрерывного излучения:
- большая дальность действия РЛС;
- возможность одновременного измерения радиальной скорости целей, находящихся в одном направлении, но на различных дальностях.
В этом случае возникает несколько частот биений. Частоты биений от разных целей выделяют с помощью узкополосных фильтров.
- высокая точность измерения скорости;
- небольшой вес и габариты измерительной аппаратуры.
Данное обстоятельство способствует размещению РЛС с частотной модуляцией непрерывного зондирующего сигнала на борту летающих объектов (космических аппаратов, самолетов, ракет и т.д.).
Недостатки метода:
- технические трудности эффективного разделения зондирующего и отраженного от цели сигналов;
- высокие требования к стабильности параметров модуляции, что необходимо для обеспечения однозначности при измерении радиальной скорости;
- трудности частотной селекции сигналов, отраженных от нескольких целей, находящихся на различных дальностях.
Они обусловлены большим количеством узкополосных фильтров.

