 2015-07-14
2015-07-14 500
500Билет 22
1.
2. Режими роботи електродвигунів у квадрантах системи координат кутова швидкість - момент ω (M)
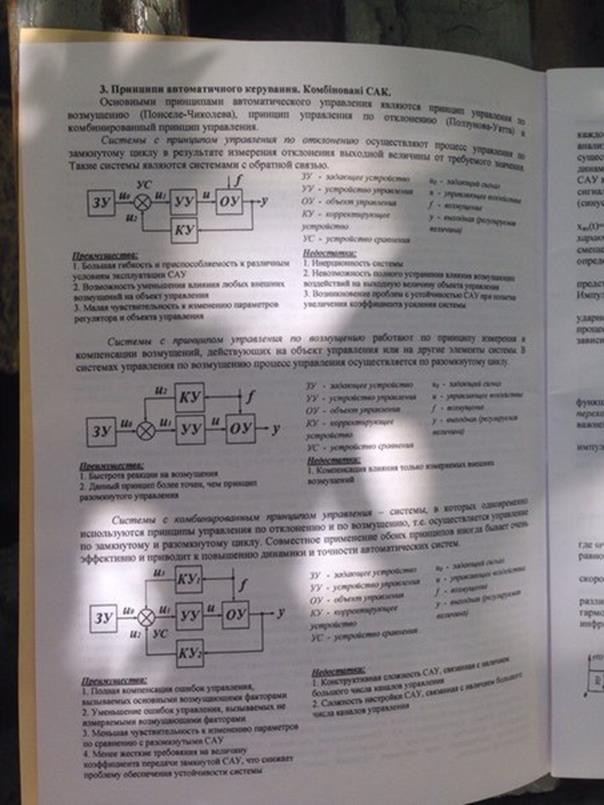
Как указывалось выше направление статического момента механизма 
 противоположно направлению электромагнитного момента двигателя
противоположно направлению электромагнитного момента двигателя  .
.
За положительное направление статического момента механизма принято отрицательное направление момента двигателя.
Механические характеристики изображают на плоскости в прямоугольной системе координат с осями  и
и  (рис. 4.5). Положение точки на плоскости, характеризуемое двумя координатами
(рис. 4.5). Положение точки на плоскости, характеризуемое двумя координатами  и ,
и ,  определяет режим работы электродвигателя.
определяет режим работы электродвигателя.
При принятых положительных направлениях для  и
и  точка установившегося режим а определяется точкой пересечения характеристик двигателя и механизма за исключением осей координат.
точка установившегося режим а определяется точкой пересечения характеристик двигателя и механизма за исключением осей координат.
Любая точка квадрантов I и III, где знаки скорости и момента одинаковы, соответствует положительному значению мощности, то есть полезной работе, совершаемой двигателем (произведение момента на скорость получается положительным  ).
).
Двигатель, при полжительной мощности  ω > 0 (
ω > 0 ( потребляет электрическую энергию из сети и преобразует электрическую энергию в механическую (то есть работает в двигательном режиме).
потребляет электрическую энергию из сети и преобразует электрическую энергию в механическую (то есть работает в двигательном режиме).
Наоборот, точки квадрантов II и IV, где знаки скорости и момента не совпадают, относятся к потреблению двигателем механической энергии ( ω < 0).
В случае отрицательной мощности  ω < 0 двигатель преобразует механическую энергию в электрическую энергию, то есть работает в режиме генератора электрической энергии.
ω < 0 двигатель преобразует механическую энергию в электрическую энергию, то есть работает в режиме генератора электрической энергии.
Электрическая машина в двигательном режиме развивает движущий момент, а в генераторном тормозной момент.
Рис. 4.5 Области двигательного и генераторного режимов электропривода на плоскости  и
и  .
.
В отличие от двигательного режима, генераторных режимов может быть несколько, в зависимости от того, как используется преобразованная электрическая энергия.
Преобразованная электрическая энергия — это энергия, полученная при переходе механической энергии двигателя в электрическую энергию (например при спуске груза или движении транспортного средства под уклон).
Генераторные режимы энергетически классифицируются следующим образом.
1. Генераторный режим с отдачей энергии в сеть — это режим рекуперативного торможения (рекуперация отдача энергии в сеть)
В этом случае преобразованная электрическая энергия за вычетом потерь отдается машиной в сеть. Баланс мощностей выражается следующим образом:
РМ = РЭ + 
где: РМ – механическая мощность на валу двигателя;
РЭ – электрическая мощность, поступающая в сеть;
– мощность потерь в силовых цепях двигателя.
Переход из двигательного режима в режим рекуперативного торможения возможен при повышении скорости двигателя сверх скорости, идеального холостого хода, (идеальный холостой ход при = 0). Факт получения тормозного момента в двигателе с одновременной отдачей им энергии в сеть позволяет считать данный режим торможения экономичным.
2. Режим торможения противо-включением.
В этом случае электрическая машина потребляет как механическую энергию с вала, так и электрическую энергию из сети. Суммарная энергия расходуется в силовых цепях двигателя в виде потерь мощности , т. е.
РМ + РЭ =
Этот режим характеризуется большими электрическими потерями.
3.Режим динамического торможения. В этом случае на потери в силовой цепи двигателя расходуется только преобразованная электрическая энергия. Энергию из сети машина не получает она отключена от сети, т. е.
РМ =
Вся механическая мощность РМ – на валу двигателя превращается в – мощность потерь в силовых цепях двигателя.
Для осуществления режима динамического торможения двигатель обычно отключают от сети и в его силовую цепь вводят дополнительное сопротивление.
В отдельных случаях электрическая машина, подключенная к питающей сети, может, тем не менее, не обмениваться с ней активной мощностью, а потреблять механическую мощность с вала и преобразовывать ее в потери, т. е. также работать в режиме динамического торможения.
Выражения (1–40)—(1–42) учитывают мощности и потери только в процессе электромеханического преобразования энергии из электрической в механическую.
Потери, связанные с созданием магнитного потока машины, не включены в балансы мощностей. На рис. 4.6 показаны возможные энергетические режимы двигателя.
Граничные режимы, отделяющие двигательные режимы от генераторных, соответствуют определенным точкам на координатных осях (рис.4.5).
Там, где = 0 при  , имеет место так называемый идеальный холостой ход двигателя. Чтобы машина могла работать в данном режиме, требуется к ее валу подвести небольшую мощность, компенсирующую механические потери и дополнительные потери вне силовых цепей.
, имеет место так называемый идеальный холостой ход двигателя. Чтобы машина могла работать в данном режиме, требуется к ее валу подвести небольшую мощность, компенсирующую механические потери и дополнительные потери вне силовых цепей.
При  = 0 и
= 0 и  имеет место так называемый режим короткого замыкания. В этом случае механическая мощность равна нулю, а потребляемая из сети электрическая энергия полностью расходуется на электрические потери.
имеет место так называемый режим короткого замыкания. В этом случае механическая мощность равна нулю, а потребляемая из сети электрическая энергия полностью расходуется на электрические потери.
Рис. 4.6 Энергетические диаграмм режимов работ двигателя 
3. Структурная схема электропривода
Электрический привод представляет собой электромеханическую систему, предназначенную для приведения в движение исполнительных органов рабочей машины и управления этим движением.
В общем случае электропривод состоит из 4-х устройств (рис.1.1):
1. преобразовательное;
2. электродвигательное;
3. передаточное;
4. управляющее.
Преобразовательное устройство предназначено для преобразования рода тока, напряжения и частоты тока питающей сети и передачи преобразованных параметров сети в электрическую часть электропривода. Поэтому оно включается между питающей сетью и электрической частью электропривода.
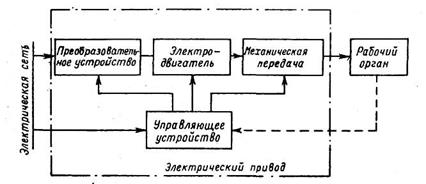
Рис. 1.1. Структурная схема электропривода
В качестве преобразовательных устройств используются:
1. для преобразования рода тока – выпрямители, преобразующие переменный ток в постоянный;
2. для преобразования напряжения – трансформаторы, преобразующие переменное напряжение одного значения в переменное напряжение другого значения той же частоты;
3. для преобразования частоты тока – преобразователи частоты, преобразующие переменный ток одной частоты в переменный ток другой, регулируемой частотыт и амплитуды.
4. для преобразования напряжения – инверторы, преобразующие постоянное напряжение в пременное регулируемой амплитуды и частоты
Рассмотрим поочередно преобразовательные устройства.








