 2015-09-07
2015-09-07 1104
1104Для керування виконавчими органами зі зворотно-поступальним рухом застосовують гідропідсилювачі. Існує багато типів гідропідсилювачів, що відрізняються числом каскадів підсилення, кількістю дроселів, їх взаємним розташуванням, методом керування і конструктивним виконанням.
Найбільше широко в гідроприводі машин, затворів і підіймачів використовують гідропідсилювачі з золотником і зворотно-поступальним рухом поршня (рис. 3.3).
Вхідним сигналом у підсилювачі є переміщення золотника 1, а вихідним - переміщення поршня 2. При переміщенні золотника вправо рідина під тиском Рн надходить по каналу А у гідроциліндр 3 і на поршні створюється зусилля  , де w — площа поршня. Рідина з лівої частини циліндра по каналу В; надходить на злив при тиску Рс. Під дією сили F поршень переміщується вліво доти, поки існує вхідний сигнал. Після повернення золотника у вихідне положення канали А і В перекриваються і рух поршня припиняється.
, де w — площа поршня. Рідина з лівої частини циліндра по каналу В; надходить на злив при тиску Рс. Під дією сили F поршень переміщується вліво доти, поки існує вхідний сигнал. Після повернення золотника у вихідне положення канали А і В перекриваються і рух поршня припиняється.
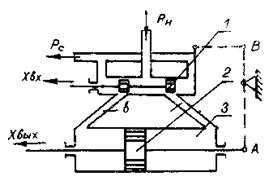
Рис.3.3. Принципова схема гідравлічного підсилювача.
Зв'язок між вихідною і вхідною величинами визначається залежністю
 , /3.2/
, /3.2/
де k — коефіцієнт пропорційності.
При xвx = const рішенням рівняння /3/ є лінійна функція:
 , /3.3/
, /3.3/
де ν — швидкість переміщення поршня.
Залежність /3.3/ показує, що при сталому вхідному сигналі поршень переміщується з постійною швидкістю, яка залежить від хвх і коефіцієнта k.
Золотники підсилювача виконують відсічними або проточними. У гідропідсилювачі з відсічним золотником ширина буртика золотника більше висоти вікна в гільзі і тому підсилювач має зону нечутливості. Перекриття вікна дозволяє фіксувати положення поршня. У гідропідсилювачі з проточним золотником ширина буртика дорівнює висоті вікна в гільзі і це підвищує чутливість підсилювача. Однак через витікання рідини може відбутися самовільне переміщення поршня під дією навантаження. Цей недолік усувають введенням зворотного зв'язку за положенням поршня (рис. 3.3, штрихова лінія).
У підсилювачі зі зворотним зв'язком переміщення золотника щодо каналів а і b дорівнює різниці переміщень самого золотника і гільзи
 , /3.4/
, /3.4/
де l1 і l2 - довжина пліч важеля АВ, і залежність між вихідною і вхідною величинами матиме вид
 . /3.5/
. /3.5/
Після диференціювання вираз /3.5/ приводиться до виду
 , /3.6/
, /3.6/
де  - коефіцієнт підсилення підсилювача;
- коефіцієнт підсилення підсилювача;  - стала часу підсилювача.
- стала часу підсилювача.
Отже, гідропідсилювач зі зворотним зв'язком є інерційним і переміщення поршня пропорційне переміщенню золотника.








