 2015-09-06
2015-09-06 1262
1262Метою роботи є вивчення принципу дії, побудови, основних характеристик, методики лабораторної перевірки блоку Р27 та набуття навичок його налаштування на задані параметри.
1 Завдання до роботи
1.1 Збалансувати вимірювальний модуль.
1.2 Перевірити градуювання органів налаштування вимірювального модуля И001: потенціометрів «α 2», «α 3», «α 4», «α ЗУ», діапазон дії потенціометра «Корректор».
1.3 Перевірити градуювання органів налаштування регулюючого модуля Р027: потенціометрів «Δ», «tИ», «α П», «τ И», «τ Д», «τ ДФ».
1.4 Налаштувати блок на задані параметри та визначити похибки виконання динамічних перетворень.
2 Загальні відомості
2.1 Блок регулюючий аналоговий з імпульсним вихідним сигналом типу Р27 призначений для застосування в локальних АСР технологічних параметрів.
Блок виконує функції:
– підсумовування до чотирьох уніфікованих вхідних сигналів постійного струму, а також вхідних сигналів, що надходять від вимірювальних перетворювачів з природними електричними сигналами;
– введення інформації про задане значення регульованої величини. Формування та підсилення сигналу неузгодження;
– формування вихідного імпульсного сигналу у відповідності з одним із законів регулювання: пропорційного (П) при охопленні блока негативним зворотним зв’язком за положенням виконавчого механізму, пропорційно-інтегрального (ПІ) та пропорційно-інтегрально-диференційного (ПІД) разом з виконавчими механізмами постійної швидкості, дво- та трипозиційні;
– незалежне масштабування вхідних сигналів;
– гальванічне розділення вхідних та вихідних ланок, а також вхідних ланцюгів один від одного;
– демпфування (згладжування) сигналу неузгодження;
– індикацію вихідного сигналу;
– введення заборони на керування навантаженням.
У таблиці 2.1 подані види та діапазони вимірювання уніфікованих вхідних сигналів модуля И001.1 блоку Р27, а в таблиці 2.2 – модифікації блоків, що виготовляються на заводі-виготівнику.
Сигнали напруги постійного струму Х 01, Х 02, Х 03 на входах модуля Р027.1 змінюються в межах від -10 до +10 В, вихідні сигнали – імпульси напруги постійного струму =24 В (вихід Z 1) та 10 В (вихід Z2).
Таблиця 2.1
| Позначення вхідного сигналу | Номінальний діапазон вимірювання вхідного сигналу | Вихідний опір, Ом | Масштабний коефіцієнт передачі | ||
| Позна- чення | Величина | Доп. відх.% | |||
| Х 1 Х 2 Х 3 Х 41 Х 42 Х 43 Х 44 Х 45 Х 5 | 0-5 мА 0-5 мА 0-5 мА 0-5 мА 4-20 мА 0-20 мА 0-10 В 0…±10 B 0-10 В | <100 <100 <100 <450 <150 <150 >10000 >10000 >10000 | – α 2 α 3 α 4 α 4 α 4 α 4 α 4 – | 0…1 0…1 0…1 0…1 0…1 0…1 0…1 | ±2 ±2 ±2 ±5 ±5 ±5 ±5 ±5 ±5 |
Таблиця 2.2
| Модифікація блоку | Номінальні діапазони зміни уніфікованих вхідних сигналів | Вид та номінальний діапазон зміни природного сигналу |
| Р27 | 0-5мА, 0-10 В | – |
| Р27.1 | 0-5мА, 0-10 В | Зміна взаємної індуктивності диференційно-трансформатор-ного перетворювача на 10 мГн у межах від -10 до +10 мГн |
| Р27.2 | 0-5мА, 0-10 В | Зміна активного опору термо-перетворювача опору на 20 Ом у межах 0-100 Ом |
| Р27.3 | 0-5мА, 0-10 В | Зміна термоЕРС-перетворювача термоелектричного градуювань ХК, ХА, ПП, ПР-30/6, ВР-5/20-1 на 10 мВ у межах 0-50 мВ |
2.2 Блок Р27 містить три модулі:
И001 – вимірювальний, що виконує гальванічне розділення аналогових вхідних сигналів, підсумовування до чотирьох аналогових сигналів з незалежним масштабуванням, введення сигналу завдання, формування сигналу неузгодження;
Р027 – регулюючий, що виконує перетворення сигналу неузгодження за ПІ- або ПІД-законом разом з виконавчим механізмом постійної швидкості, за П-законом при охопленні блоку жорстким зворотним зв’язком за положенням виконавчого механізму, а також гальванічне розділення вхідних та вихідних ланцюгів, демпфування сигналу неузгодження, індикацію вихідного імпульсного сигналу, введення сигналу заборони на керування навантаженням;
ИПС01 – джерело живлення, що виробляє стабілізовані напруги ±15 В для живлення операційних підсилювачів модулів та нестабілізовану напругу =24 В.
3 Вимірювальний модуль И001
3.1 Функціональну схему модуля И001.1 подано на рисунку 2.1. Модуль містить модулятори 1, 2, 3, підсилювач-модулятор 4, суматор 5, демодулятор-підсилювач 6, генератор 7, джерело опорної напруги 8, вузол коректора 9.
Модуль виконує вказані функції у відповідності з рівнянням статичної характеристики
 (2.1)
(2.1)
де всі сигнали виражені у відносних величинах від номінального діапазону їх зміни.
Модулятори 1, 2, 3 перетворюють вхідні уніфіковані сигнали постійного струму (0-5 мА) X 1, Х 2 та Х 3 у сигнали змінного струму та перемножують їх на масштабні множники 1, α 2 і α 3 відповідно. Підсилювач-модулятор 4 підсумовує вхідні уніфіковані сигнали Х 41- Х 45, перетворює їх алгебраїчну суму на напругу змінного струму та перемножує на масштабний множник α 4.
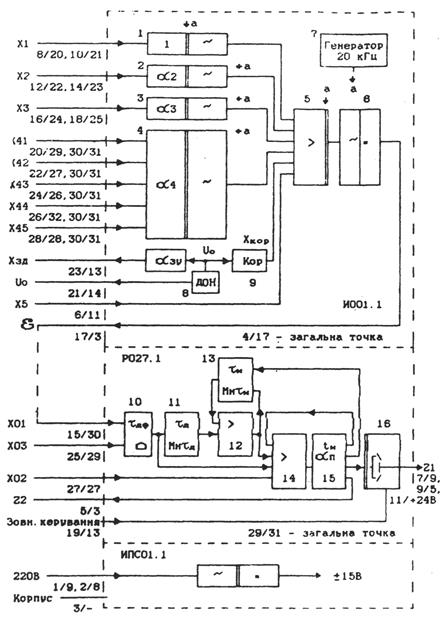
Рисунок 2.1 – Функціональна схема блоку Р27
Суматор 5 виконує гальванічне розділення підсумованих сигналів Х 1- Х 4 з виходів модуляторів 1-4, Хкор з вузла коректора 8 та вхідного сигналу постійної напруги Х 5 (0-10 В) одне від одного та від вихідного сигналу, демодулятор-підсилювач 6 перетворює вихідний сигнал суматора на напругу постійного струму – сигнал неузгодження. Керування ключами модуляторів та демодуляторів виконується напругою змінного струму прямокутної форми з частотою 20 кГц, що надходить від генератора 7. Він же формує й напругу постійного струму, гальванічно ізольовану від загального живлення модуля живлення операційних підсилювачів входів.
Джерело опорної напруги 8 призначено для живлення стабілізованою напругою постійного струму вузла коректора 9 та зовнішнього потенціометричного задатчика (наприклад, ЗУ11).
3.2 Принципову електричну схему модуля И001.1 подано на рисунку 2.2. Модулятори 1-3 виконані на транзисторних збірках (ТЗ) V 9- V 11, що працюють у ключовому режимі. Масштабні коефіцієнти α 2 і α 3 встановлюються потенціометрами R 13, R 14. Конденсатори С 1- С 3 шунтують вхідні ланки модуля щодо змінного струму, а діоди V 1- V 6 замикають ланки вхідних сигналів Х 1- Х 3 при відключенні живлення модуля.
Підсилювач-модулятор 4 виконано на ОП А 1, вихідний сигнал якого модулюється на ТЗ V 12. Підсумовування вхідних сигналів Х 4 i виконується за допомогою резисторів R 1- R 5 відносно загальної точки входу Х 4. ОП А 1 охоплений послідовним негативним зворотним зв’язком (НЗЗ) через резистор R 6, масштабний коефіцієнт ОП α 4 встановлюється потенціометром R 16.
Суматор 5 виконано на трансформаторі Т 1. Вхідні модульовані сигнали подаються на обмотки ІІ-V, вихідний сигнал суматора виділяється на обмотці I.
Демодулятор-підсилювач 6 виконано на ОП А 2. На вході якого встановлений ключовий демодулятор на ТЗ V 13. Підсилювач охоплено паралельним НЗЗ через резистори R 27 та R 30. Загальний коефіцієнт передачі модуля підстроюється змінним резистором R 30.
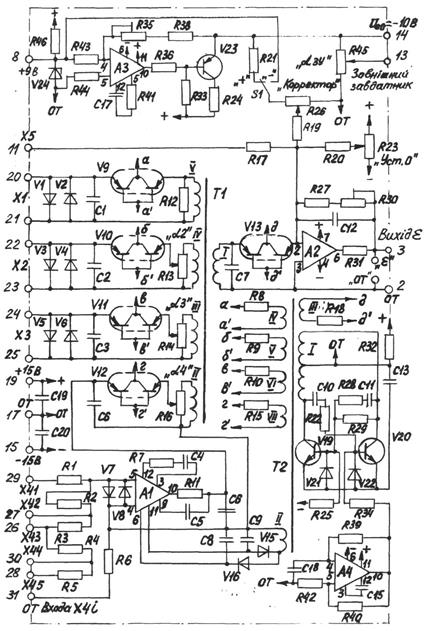
Рисунок 2.2 – Принципова електрична схема модуля И001.1
Вузол коректора 9 складається з потенціометра R 26 («Корректор»), R 23 («Уст. 0»), комутаційних гнізд S з замикачем, за допомогою якого встановлюється полярність сигналу коректора («+», «–»), а також потенціометра R 45 («αЗУ ») для плавного регулювання діапазону дії зовнішнього потенціометричного задатчика.
Джерело опорної напруги 8 виконано на ОП A 3 та транзисторі V 23. Величина стабілізованої напруги на вході ОП задається параметричним стабілізатором на стабілітроні V 24. потім її потужність підсилюється транзистором V 23. Вихідна напруга підстроюється змінним резистором R 35.
Генератор 7 містить автогенератор прямокутної напруги з частотою 20 кГц, виконаний на ОП А 4 та тригер, виконаний на транзистоpax V 19, V 20. Частота напруги, що генерується, визначається постійною часу ланки R 39- C 18 та величиною позитивного зворотного зв’язку (ПЗЗ), що створюється ланкою R 40- R 42. Підсилювачем потужності є тригер, керований вихідною напругою автогенератора. Навантаженням тригера є обмотка I трансформатора Т 2. З вихідних обмоток ІІІ-VІІ Т 2 знімається прямокутна напруга, що керує ключами модуляторів та демодулятора.
Випрямлена діодами V 15, V 16 та згладжена конденсаторами С 8, С 9 напруга з обмотки II Т 2 використовується для формування гальванічно ізольованого живлення ОП А 1.
4 Регулюючий модуль Р027
4.1 Функціональну схему модуля Р027.1 подано на рисунку 2.1. Модуль містить функціональні вузли: демпфер 10, диференціатор 11, суматор каналу зворотного зв’язку 12, інтегратор 13, суматор прямого каналу 14, трипозиційне реле 15 та підсилювач потужності 16.
Сума вхідних сигналів Х 01 та Х 03 модуля згладжується демпфером 10 за аперіодичним законом із сталою часу τДФ та надходить до входу суматора прямого каналу 14, де підсумовується з вхідним сигналом Х 2 модуля. Вихідний сигнал суматора прямого каналу 14 керує трипозиційним реле (тригером) 15 із зоною нечутливості Δ.
Суматор прямого каналу 14 та трипозиційне реле 15 охоплені функціональним НЗЗ через аперіодичну ланку, яку виконано як інтегратор 13 із сталою часу τИ, охоплений жорстким НЗЗ через суматор каналу зворотного зв’язку 12. При наявності сигналів на вході модуля в контурі, що охоплений функціональним НЗЗ, виникає режим періодичних включень, у результаті яких на виході трипозиціиного реле 15 формується послідовність імпульсів, полярність та скважність яких залежить від полярності та величини вхідних сигналів модуля.
Ці імпульси подаються прямо на вихід Z 2 модуля, а на вихід Z 1 – через підсилювач потужності 16. У результаті інтегрування вихідних імпульсів виконавчим механізмом постійної швидкості формується ПІ-закон регулювання. При цьому постійна часу інтегрування дорівнює постійній часу інтегратора 13 τИ, а коефіцієнт передачі αП визначається коефіцієнтом передачі функціонального НЗЗ.
Тривалість імпульсу tИ регулюється шляхом зміни величини коефіцієнта передачі жорсткого позитивного зворотного зв’язку, яким охоплене трипозиційне реле 15 через суматор прямого каналу 14.
У модулі передбачене формування диференційної складової закону регулювання для вхідних сигналів Х 01 та Х 02. Для цього сума вказаних сигналів з виходу демпфера подається на вхід диференціатора 11, виконаного у вигляді реальної диференціюючої ланки з постійною часу τД. Вихідний сигнал диференціатора подається на вхід суматора зворотного зв’язку 12, в результаті чого після інтегрування вихідних імпульсів модуля виконавчим механізмом формується ПІД-закон регулювання.
Передавальні функції модуля разом з інтегруючим виконавчим механізмом описуються рівняннями:
– при ПІ-законі регулювання
 (2.2)
(2.2)
– при ПІД-законі регулюванні
 (2.3)
(2.3)
де TS – час повного ходу виконавчого механізму (час сервомотора), с,
У модулі можливе відключення також інтегральної складової. Уцьому випадку реалізуються три- та двопозиційні закони регулювання.
4.2 Принципову електричну схему модуля P027.1 подано на рисунку 2.3. Суматор прямого каналу 14 побудовано на ОП А 2 з високоомними входами, охопленому НЗЗ через резистор R 6 та конденсатор С 3. На неінвертуючому вході ОП включений демпфер 10 у вигляді аперіодичної ланки R 2- C 2, що перетворює суму сигналів X 01 та Х 03. Постійна часу демпфера плавно регулюється потенціометром R 2 та зв’язана з параметрами схеми залежністю
 (2.4)
(2.4)
де α – положення ручки потенціометра R 2;
R 2 – величина повного опору потенціометра R 2, Мом;
С 2 – величина ємності конденсатора С 2, мкф.
На інвертуючому вході суматора підсумовуються вхідний сигнал Х 2 та сигнал з виходу суматора каналу НЗЗ. Коефіцієнт передачі суматора за всіма трьома входами Х 1- Х З дорівнює 25-35. ОП А 2балансується змінним резистором R 9.
Диференціатор 11 побудовано на ОП А 1 з високоомними входами. Сигнал на його вхід надходить через конденсатор демпфера С 2, який для цього вузла є диференціюючим.
Постійна часу диференціювання τД регулюється плавно потенціометром R10 («τД») та дискретно замикачем S l («×1», «×10», «Выкл»). Величина τД зв’язана з параметрами схеми залежністю
 (2.5)
(2.5)
де α = 0,1...1 – доля вихідної напруги ОП А 1, що знімається з точки з’єднання резисторів R 11 та R 13 відносно загальної точки (ОТ) схеми при даному положенні ручки потенціометра R 10;
RД – величина опору зворотного зв’язку диференціатора, МОм, причому:
 – при положенні замикача S 1 «×1»;
– при положенні замикача S 1 «×1»;
RД = R 7 – при положенні замикача S 1 «×10»;
С 2 – величина ємності, мкф.
Вихідна напруга диференціатора дорівнює нулю при будь-якому вхідному сигналі, якщо замикач S 1 знаходиться в положенні «Выкл». Диференціатор балансується змінним резистором R 5.
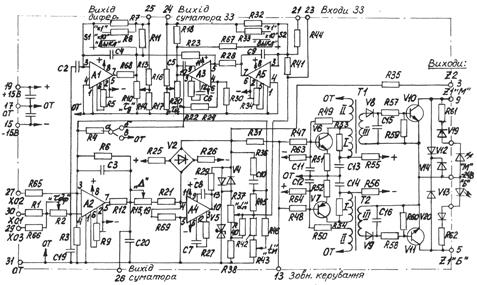
Рисунок 2.3 – Принципова електрична схема модуля Р027.1
Трипозиційне реле 16 (трипозиційний тригер) виконано на ОП А 4, охопленому НЗЗ через нелінійний елемент, що формує зону нечутливості Δ блока. Нелінійний елемент виконано на діодному мості V 2.
Величина Δ плавно регулюється потенціометром R 15 («Δ»). Елементи R 29, V 3, V 4, V 5 призначені для стабілізації вихідних напруг на виході тригера.
Формування закону регулювання виконується з допомогою функціонального НЗЗ модуля, що містить інтегратор 13, побудований на ОП А 5, суматор каналу зворотного зв’язку 12, побудований на ОП A 3 та ланцюг жорсткого НЗЗ інтегратора, що має паралельно з’єднані резистори R 32 та R 33 при положенні замикача S 2 «×1» або резистор R 32 при положенні замикача S 2 «×10».
Постійна часу інтегрування τи регулюється плавно потенціометром R 20 («τи») та дискретно за допомогою замикача S 2 («×1», «×10», «Выкл»). Величина τи зв’язана з параметрами схеми залежністю
 (2.6)
(2.6)
де α = 0,1...1 – доля вихідного сигналу суматора прямого каналу, що знімається з точки з’єднання резисторів R 16, R 18 відносно загальної точки схеми, при даному положенні повзунка потенціометра R 20;
RI – величина опору, МОм, причому
 – при положенні замикача S 2 «×1»;
– при положенні замикача S 2 «×1»;
RI = R 32 – при S 2 «×10»;
С 9 – величина ємності, мкф.
Коефіцієнт передачі модуля αП плавно регулюється потенціометром R 37 («αП»). Величина αП зв’язана з параметрами
схеми співвідношенням
 (2.7)
(2.7)
де β = 0,03...1 – доля вихідного сигналу трипозиційного реле, що знімається з движка потенціометра R 37 відносно ОТ;
R 41, С 9 – величини опору та ємності відповідно, МОм та мкф.
Тривалість інтегральних імпульсів tИ модуля регулюється плавно потенціометром R 43 («tИ»).
Підсилювач потужності містить два канали, що спрацьовують при протилежних полярностях вхідного сигналу. Кожний канал складається з блокінг-генератора (виконаного на транзисторах V 6 та V 7) та транзисторів, що працюють у ключовому режимі (V 10 та V 11). Елементи R 61, R 62, V 19, V 20 призначені для захисту та обмеження струму в світлодіодах, розташованих на передній панелі блока, а елементи V 12- V 14 – для захисту транзисторів V 10, V 11 при індуктивному навантаженні.
При введенні сигналу заборони на керування навантаженням блока бази транзисторів V 6 та V 7 блокінг-генераторів закорочуються з ОТ модуля, імпульси в колекторному ланцюгу блокінг-генераторів відсутні і вихідний сигнал Z 1 дорівнює нулю при будь-якому вхідному сигналу модуля.
5 Органи налаштування та контролю
5.1 На панелі модуля И001.1 розташовані такі органи налаштування та контролю:
– «α 2», «α 3», «α 4» – потенціометри для встановлення масштабних коефіцієнтів передачі за входами Х 2, Х 3, Х 4 і;
– «Корректор» – потенціометр для балансування модуля при ненульових вхідних сигналах;
– «αЗУ» – потенціометр для встановлення діапазону дії зовнішнього потенціометричного задатчика;
– «Уст. 0» – потенціометр для балансування модуля при нульових вхідних сигналах:
– комутаційні гнізда з замикачами для зміни полярності підключення патенціометра «Корректор»;
– «e» – контрольне гніздо для підключення вольтметра при вимірюванні сигналу неузгодження відносно загальної точки «ОТ».
5.2 На панелі модуля Р027.1 розташовані такі органи налаштування та контролю:
– «Δ» – потенціометр для встановлення зони нечутливості в процентах від максимального вхідного сигналу;
– «αП» – потенціометр для встановлення коефіцієнту пропорційності блока, с/(% ходу BМ);
– «τИ», «τД», «τДФ» – потенціометри для встановлення постійних часу інтегрування, диференціювання та демпфування, с;
– «tИ» – потенціометр для встановлення тривалості iмпульсу включення виконавчого механізму, с;
– коммутаційні гнізда з замикачами для дискретної зміни масштабних коефіцієнтів для потенціометрів «τИ» та «τД» або їх відключення «×1», «×10», «Выкл».
5.3 На передній панелі блока розташовані світлодіодні індикатори напряму спрацьовування блоку «Больше» та «Меньше».
6 Порядок виконання роботи
Увага! Невикористані входи модуля И001.1 за струмом залишають вільними, а за напругою – закорочують перемичками! Початковий рівень сигналу 4-20 мА компенсують коректором модуля.
Частина 1. Перевірка градуювання органів налаштування вимірювального модуля И001.1
Дослід 1. Балансування вимірювального модуля
1.1 Встановіть усі органи налаштування модуля на нульові поділки шкали.
1.2 Подайте вихідний сигнал неузгодження модуля e на вхід «Рассогласование» індикатора В12 (клеми 6, 7).
1.3 Збалансуйте модуль за допомогою потенціометра «Уст. 0».
Дослід 2. Визначення градуювання потенціометрів «αі» (і = 2, 3, 4) вимірювального модуля
2.1 Подайте вхідний сигнал Іе = 4 мА від джерела постійного струму ЗУ05 на вхід Х 2 модуля, а вихідний сигнал модуля – на вольтметр з межею вимірювання 5 В.
2.2 Встановіть потенціометр «α 2» у положення «1», виміряйте вихідний сигнал Ua2. Обчисліть дійсне значення коефіцієнта передачі α 2 Д як відношення вихідного сигналу до вхідного. Результат обчислення занесіть до таблиці 2.3.
2.3 Виконайте п. 2.2 для положень потенціометра «α 2» «0,8»; «0,6»; «0,4»; «0,2»; «0».
2.4 Виконайте пп. 2.1-2.3 для входів Х 3, Х 41 та потенціометрів «α 3», «α 4» (за завданням керівника сигнал Іе подавайте на вхід Х 3 або Х 4).
2.5 Побудуйте графіки αіД = f (αіГ).
Таблиця 2.3
| αіГ | 0,2 | 0,4 | 0,6 | 0,8 | 1,0 | |
| α2Д | ||||||
| α3Д | ||||||
| α4Д |
Дослід 3. Визначення діапазону дії потенціометра «Корректор»
3.1 Виконайте пп. 1 та 3 досліду 1.
3.2 Встановіть потенціометр «Корректор» у положення «100 %».
3.3 Визначіть величину вихідного сигналу модуля Ue max та Ue min, змінюючи полярність сигналу коректора замикачем «+», «–». Значення сигналів занесіть до таблиці 2.4.
3.4 Обчисліть діапазон дії коректора за формулою
 (2.8)
(2.8)
Таблиця 2.4
| Ue max | Ue min | Δ UaКОР |
| В | В | В |
Дослід 4. Визначення градуювання потенціометра «α ЗУ»
4.1 Виконайте пп. 1 та 3 досліду 1.
4.2 Підключіть до модуля зовнішній потенціометричний задатчик ЗУ11 (клеми 4, 6, 23).
4.3 Встановіть потенціометр «α ЗУ» у положення «1». Повертаючи ручку задатчика ЗУ11, встановіть вихідну напругу модуля UaЗУ = l0 В.
4.4 Виміряйте величину UaЗУ для положень «1», «0,8»; «0,6»; «0,4»; «0,2»; «0» потенціометра «α ЗУ» результати вимірювань занесіть до таблиці 2.5.
4.5. Побудуйте графік UaЗУ = f (α ЗУ).
Таблиця 2.1
| α ЗУ | – | 0,2 | 0,4 | 0,6 | 0,8 | ||
| UaЗУ | В |
Частина 2. Перевірка градуювання органів налаштування регулюючого модуля Р027
Дослід 5. Визначення градуювання потенціометра «Δ»
5.1 Подайте на вхід Х 2 сигнал від ДС типу ЗУ05.
5.2 Встановіть потенціометр «α 2» у положення, визначене графіком α 2 Д = f (α 2 Г), при якому вхідному сигналу в 1 мА відповідає вихідний сигнал в 1 В. Усі інші потенціометри модуля встановіть у крайні ліві положення.
5.3 Збільшуйте сигнал від ДС до вмикання одного із світлових індикаторів «Больше» або «Меньше». Значення струму спрацювання Іспр 1 занесіть до таблиці 2.6.
5.4 Зменшуйте сигнал від ДС до вимикання світлового індикатора та занесіть до таблиці значення струму відпускання Івід1. Обчисліть відносну величину зони повернення
 (2.9)
(2.9)
5.5 Подайте на той же вхід модуля сигнал протилежної полярності, помінявши місцями провідники від ДС. Виконайте пп. 5.2, 5.3 визначіть Іспр2, Івід2 та обчисліть Δ ПД – , а також величину зони нечутливості Δ Д.
5.6 Виконайте пп. 5.3-5.5 для 3 проміжних положень потенціометра «Δ». Обчисліть відносну похибку встановлення величини зони нечутливості σΔ у процентах. Результати вимірювань та обчислень занесіть до таблиці 2.6.
Таблиця 2.6
| Δ Г | Іспр 1 | Івід1 | Δ Д | Іспр 2 | Івід2 | Δ ПД | σΔ |
| % | мА | мА | % | мА | мА | % | % |
Дослід 6. Визначення градуювання потенціометра «tИ»
6.1 Виконайте п. 1 досліду 5, підключіть блок керування БУ21 до виходів модуля (клеми 7, 9, 11).
6.2 Встановіть потенціометри «αП», «τИ», «τДФ» у положення, відповідно, «1», «10», «10», замикач «τИ» – у положення «×1». Відключіть Д-складову закону замикачем «τД».
6.3 Встановіть перемикачем БУ21 автоматичний режим керування навантаженням. Сигнал по положенню регулюючого органу (клеми Г15 (Г16)) подайте на вхід потенціометра КСП4, встановіть швидкість руху діаграмного паперу 1800 мм/г.
6.4 Включіть протягування діаграмного паперу КСП4, подайте стрибком сигнал від ДС Іе = 0,5 мА та запишіть криву розгону модуля.
6.5 Визначіть за графіком середнє значення тривалості одного імпульсу включення виконавчого механізму tИд. Обчисліть відносну похибку встановлення часу імпульсу σtИ у процентах. Результати вимірювань та обчислень занесіть до таблиці 2.7.
6.6 Виконайте пп. 6.3, 6.4 для положень потенціометра «tИ» «0,8»; «0,6»; «0,4»; «0,2»; «0».
6.7 Побудуйте графік tИ д = f (tИ г).
Таблиця 2.7
| tИ г | tИ д | σtИ |
| с | с | с |
Дослід 7. Визначення градуювання потенціометра «αП»
7.1 Виконайте п. 1 досліду 6, сигнал з виходу Z2 модуля подайте на вольтметр В5 для вимірювання сигналу або на КСП4 для його реєстрації.
7.2 Відключіть замикачами «τИ», «τД» І- та Д-складові закону регулювання, встановіть τДФ = 0.
7.3 Виконайте пп. 3 та 4 досліду 6.
7.4 Визначіть по графіку дійсне значення коефіцієнта прапорційності як відношення тривалості першого імпульсу включення виконавчого механізму до амплітуди вхідного сигналу. Обчисліть відносну похибку встановлення коефіцієнта пропорційності σαП у процентах. Результати вимірювань та обчислень занесіть до таблиці 2.8.
7.5 Виконайте пп. 3 та 4 досліду 6 для 3 проміжних положень потенціометра «αП».
7.6 Побудуйте графік αПд = f (αПг).
Таблиця 2.8
| αПг | αПд | σαП |
| с/% | с/% | % |
Дослід 8. Визначення градуювання потенціометра «τИ»
8.1 Виконайте пп. 1 та 3 досліду 6.
8.2 Встановіть потенціометри «αП» у положення «1», «τДФ» – у крайнє ліве положення, відключіть замикачем «τД» Д-складову закону регулювання.
8.3 Виконайте п. 4 досліду 6 для 3 проміжних значень τИ у межах шкали потенціометра «τИ» при положенні множника «×1».
8.4 Визначіть по графікам дійсне значення постійної часу інтегрування τИ. Обчисліть відносну похибку встановлення постійної часу інтегрування στИ в процентах. Результати вимірювань та обчислень занесіть до таблиці 2.9.
8.5 Виконайте пп. 8.3, 8.4 при значенні множника «τИ» рівним «×10», для вхідного сигналу Іе ≤ 0,1 мА.
8.6 Побудуйте графік τИд =f (τИг).
Таблиця 2.9
| Мн. «τИ» | Іе | τИг | τИд | στИ |
| – | мА | с | с | % |
Дослід 9. Визначення градуювання потенціометра «τД»
9.1 Виконайте пп. 1 та 3 досліду 6.
9.2 Встановіть потенціометри: «Δ» – у крайнє ліве положення, «tИ» – «0,5 c», «αП» – «1», «τДФ» – «10 с» відключіть замикачем «τИ» І-складову закону регулювання.
9.3 Виконайте п.4 досліду 6 для 3 проміжних значень τДг в межах шкали потенціометра «τД» при множникові «×1».
9.4 Визначіть по графікам дійсне значення постійної часу диференціювання τДд. Обчисліть відносну похибку встановлення постійної часу диференціювання σ τД у процентах. Результати вимірювань та обчислень занесіть до таблиці 2.10.
9.5 Виконайте пп. 9.3, 9.4 при значенні множника «τД» рівним «×10», для вхідного сигналу Іе ≤ 0,1 мА.
9.6 Побудуйте графік τДд = f (τДг).
Таблиця 2.10
| Мн. «τД» | Іе | τДг | τДд | στД |
| – | мА | с | с | % |
Дослід 10. Визначення градуювання потенціометра «τДФ»
10.1 Виконайте пп. 1 та 3 досліду 6 та п.2 досліду 9.
10.2 Виконайте п. 4 досліду 6 для 3 проміжних значень τДФг у межах шкали потенціометра «τДФ».
10.3 Визначіть по графікам дійсны значення постійної часу демпфування τДФд. Обчисліть відносну похибку встановлення постійної часу демпфування σ τДФ у процентах. Результати вимірювань та обчислень занесіть до таблиці 2.11.
10.4 Побудуйте графік τДФд =f (τДФг).
Таблиця 2.11
| τДФг | τДФд | σ τДФ |
| с | с | % |
Частина 3. Налаштування блоку на задані параметри
Дослід 11. Визначення точності налаштування блоку на задані параметри
11.1 Визначіть у відповідності з варіантом завдання (таблиця 2.12) по градуювальних графіках, одержаних у дослідах 1-10, розрахункові положення потенціометрів та перемикачів масштабних множників (уставки) «Δ», «tИ», «αП», «τИ», «τД», «τДФ».
11.2 Встановіть розрахункові значення уставок блока.
11.3 Виконайте пп. 1, 3 та 4 досліда 6. (Увага! При встановленні замикача «αП» у положення «×10» на вхід блока необхідно подавати сигнал Іе ≤ 0,1 мА).
11.4 Визначіть по записаному на КСП4 графіком кривої розгону дійсні значення параметрів налаштування блока. Обчисліть відносні похибки встановлення параметрів налаштування блока в процентах.
11.5 Зробіть висновки про дійсну точність встановлення уставок блока.
Таблиця 2.12
| Варіант | КР, %/мА | τИ, с | τД, с | τДФ, с | Δ, мА | tИ, с |
| 0,04 | 1,0 | |||||
| 0,02 | 0,5 | |||||
| 0,05 | 0,8 | |||||
| 4,5 | 0,01 | 0,3 | ||||
| 0,08 | 0,2 | |||||
| 0,02 | 1,0 | |||||
| 1,5 | 0,05 | 0,8 | ||||
| 0,03 | 0,6 | |||||
| 0,04 | 0,4 | |||||
| 0,08 | 0,3 |








