 2015-09-06
2015-09-06 10515
10515Принцип работы приборов индукционной системы основан на действии вращающегося, бегущего или переменного магнитного поля переменного тока (создаваемого одним или несколькими неподвижными электромагнитами) на подвижную часть, представляющую собой чаще всего металлический диск. Укрепленный на одной оси с указательной стрелкой алюминиевый диск помещается между электромагнитами таким образом, что их магнитные потоки, пронизывая диск, индуцируют в нем ЭДС и токи. Взаимодействие между индуцированными токами и переменными потоками электромагнитов вызывает вращение диска.
Индукционные приборы разделяются на однопоточные, вращающий момент которых создается взаимодействием одного потока и тока, и многопоточные, вращающий момент которых создается взаимодействием нескольких (не менее двух) потоков и токов.
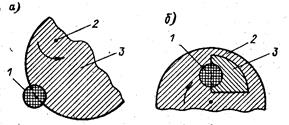 |
| Рис. 2.3.1. Схема измерительного механизма индукционных приборов: а – однопоточного; б – двухпоточного |
В однопоточных приборах (рис. 2.3.1, а) создаваемый катушкой 1 переменный магнитный поток пронизывает алюминиевый диск 3, индуцируя в нем ЭДС и токи. Укрепленный на асимметрично расположенной оси 2 диск перекрывает (экранирует) часть силовых линий магнитного поля катушки. Под влиянием сил взаимодействия потока и индуцированных токов диск поворачивается в сторону уменьшения его площади, находящейся в зоне действия магнитного поля. На рис. 2.3,1, б приведена принципиальная схема устройства простейшего двухпоточного прибора с одним электромагнитом и медным экраном. Переменный магнитный поток катушки 1 частично перекрывается экраном 3 и разбивается на две части: 1) пронизывающую часть диска 2, расположенную против экрана, и 2) пронизывающую часть диска, не закрытую экраном. Наличие экрана создает два пронизывающих диск потока, смещенных в пространстве. Кроме того, вследствие дополнительных потерь на вихревые токи в экране первый поток отстает по фазе от второго потока. Оба потока, сдвинутые по фазе и в пространстве, создают бегущее поле, поворачивающее диск в сторону направления вращения поля (от части полюса, не закрытой экраном, к закрытой). Иногда вместо медных экранов применяют короткозамкнутые медные витки (кольца), которые надеваются на катушки с таким расчетом, чтобы они перекрывали часть полюсных наконечников. Одно и двухпоточные приборы с экраном обладают сравнительно небольшим вращающим моментом и в настоящее время не применяются.
На рис. 2.3.2 приведены принципиальная схема устройства и векторная диаграмма двухпоточного индукционного прибора с бегущим полем. Укрепленный симметрично на оси 2 алюминиевый диск 3 пронизывается двумя смещенными в пространстве потоками Ф1 и Ф2.
Если переменные токи I1 и I2, протекающие по обмоткам двух катушек 4 и 5, сдвинуты по фазе на угол y, то из предположения, что сердечники катушек не насыщены, а потери на гистерезис и вихревые токи в них отсутствуют, следует, что и потоки Ф1 и Ф2 будут сдвинуты по фазе на тот же угол y. Потоки Ф1 и Ф2, пронизывая диск, будут индуцировать в нем ЭДС Е1 и Е2, вызывающие в диске токи I'1 и I'2. Электродвижущие силы Е1 и Е2 и совпадающие с ними по фазе токи I'1 и I'2 будут отставать от своих потоков на угол p/2.
Результирующий момент слагается из двух моментов: момента М1, возникающего от взаимодействия потока Ф1 с током I'2, и момента М2, создаваемого взаимодействием потока Ф2 с током I'1. Значения моментов, возникающих от взаимодействия между собственными потоками и токами (Ф1 с током I'1 и Ф2 с током I'2), незначительны, а если принять, что диск имеет только активное сопротивление, то они равны нулю (так как угол сдвига между потоком и током, им индуцированным, равен p/2). Подвижная часть приборов, обладающая значительной инерцией, не будет реагировать на изменения мгновенных значений вращающего момента в течение каждого периода переменного тока, и отклонение ее вместе со стрелкой 1, а, следовательно, и показания прибора будут зависеть от среднего значения вращающего момента. Как известно, среднее за период значение вращающего момента МВР от взаимодействия переменного потока Ф с индуцированным им в диске током I пропорционально значениям взаимодействующих потока Ф и тока I, а также косинусу угла g сдвига по фазе между ними, т.е.
 .
.
Моменты М1 и М2 могут быть определены по следующим формулам:
 ;
;  .
.
На основании данных векторной диаграммы, приведенной на рис. 2.3.2, б, эти равенства могут быть представлены в следующем виде:
 ;
;
 .
.
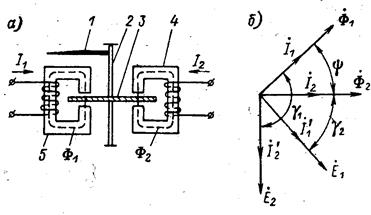 |
| Рис. 2.3.2. Двухпоточный прибор индукционной системы: а – принципиальная схема устройства; б – векторная диаграмма |
Противоположные знаки моментов М1 и М2 указывают на то, что один контур тока (I'1) втягивается во взаимодействующее с ним поле (Ф2), а другой (I'2) выталкивается из взаимодействующего с ним поля (Ф1). Оба момента совпадают по направлению и поворачивают диск в одну и туже сторону, что подтверждается проверкой по правилу левой руки с учетом сдвига фаз между потоками и токами.
Поэтому результирующий момент, действующий на диск, равен  . Результирующий момент направлен в сторону от опережающего по фазе потока (в данном случае Ф1) к отстающему. При неизменном сопротивлении диска и синусоидальном характере изменения потоков с частотой f токи равны:
. Результирующий момент направлен в сторону от опережающего по фазе потока (в данном случае Ф1) к отстающему. При неизменном сопротивлении диска и синусоидальном характере изменения потоков с частотой f токи равны:  ;
; 
 . Тогда выражение для результирующего момента примет следующий вид:
. Тогда выражение для результирующего момента примет следующий вид:
 .
.
Вращающий момент индукционных приборов пропорционален произведению магнитных потоков, пронизывающих контур, синусу угла сдвига между ними и зависит от частоты тока. Из последней формулы следует, что для создания вращающего момента необходимо иметь не менее двух переменных потоков (или двух составляющих одного потока), сдвинутых по фазе и смещенных в пространстве. В случае совпадения потоков по фазе y = 0 и siny = 0 вращающий момент равен нулю. Максимальный вращающий момент будет при наибольших значениях магнитных потоков и сдвига фаз между ними в ¼ периода (y = 90° и siny = 1). При ненасыщенных сердечниках потоки Ф1 и Ф2 прямо пропорциональны токам I1 и I2, протекающим по обмоткам катушек 4 и 5 (рис. 2.3.2) и, следовательно, значение результирующего момента равно
МВР = k f I1 I2 sin y.
Противодействующий вращению подвижной части момент МПР может быть создан пружиной (при использовании в качестве ваттметра), и в этом случае он будет пропорционален углу закручивания a: МПР = DКР a. Для момента равновесия МВР = МПР или
k f I1 I2 sin y = DКР a, откуда угол поворота подвижной части прибора равен
 ,
,
т.е. пропорционален произведению токов, проходящих через катушки (либо пронизывающих диск потоков), синусу угла сдвига между ними и зависит от частоты тока.
К числу достоинств индукционных приборов следует отнести большой вращающий момент (до 5 г·см), малое влияние внешних магнитных полей, стойкость к перегрузкам (подвижная часть приборов не требует подвода тока и выполняется весьма прочной), надежность в работе. Изменение температуры окружающей среды вызывает изменение активного сопротивления диска, что в некоторой степени влияет на показания приборов.
В отличие от приборов переменного тока других систем индукционные приборы могут применяться в сетях с одной определенной частотой: на приборах обычно указывается номинальная частота измеряемой величины. Даже небольшое изменение частоты, как в сторону ее увеличения, так и в сторону уменьшения приводит к большим погрешностям измерений. В связи с этим амперметры и вольтметры индукционной системы не получили широкого распространения.
Индукционные измерительные механизмы используются преимущественно в счетчиках электрической энергии для цепей переменного тока промышленной частоты.

