 2015-09-06
2015-09-06 1439
1439ИСАВП-РТ интегрирует в единую систему технические решения, имеющие самостоятельное значение:
- унифицированная система автоматизированного вождения одиночного
грузового поезда (УСАВПГ), обеспечивающая энергооптимальную
траекторию движения и улучшающая условия работы локомотивной
бригады.
- система передачи управляющих и диагностируемых команд и
параметров по защищенному цифровому радиоканалу, разрешенному ГКРЧ, с
использованием радиомодемов, резервированием его по низкочастотному
радиоканалу и поездной радиосвязи;
- система дистанционного автоматического управления тормозами
соединенного поезда по индивидуально рассчитанному для каждого
локомотива алгоритму с учетом профиля пути и ограничений скорости;
- унифицированная кабина управления тяговым подвижным составом;
- электронная система управления тяговыми и вспомогательными цепями
локомотива;
- программное средство ограничения продольных динамических сил по
условиям недопущения выдавливания вагонов и обрывов автосцепок;
|
|
|
- алгоритмы управления распределенными по составу локомотивами в
соединенном поезде с расчетами до 80% управляющих команд в системе
УСАВПГ каждого локомотива, обеспечивающие энергооптимальные и
безопасные режимы вождения, в том числе с учетом нештатных ситуаций.
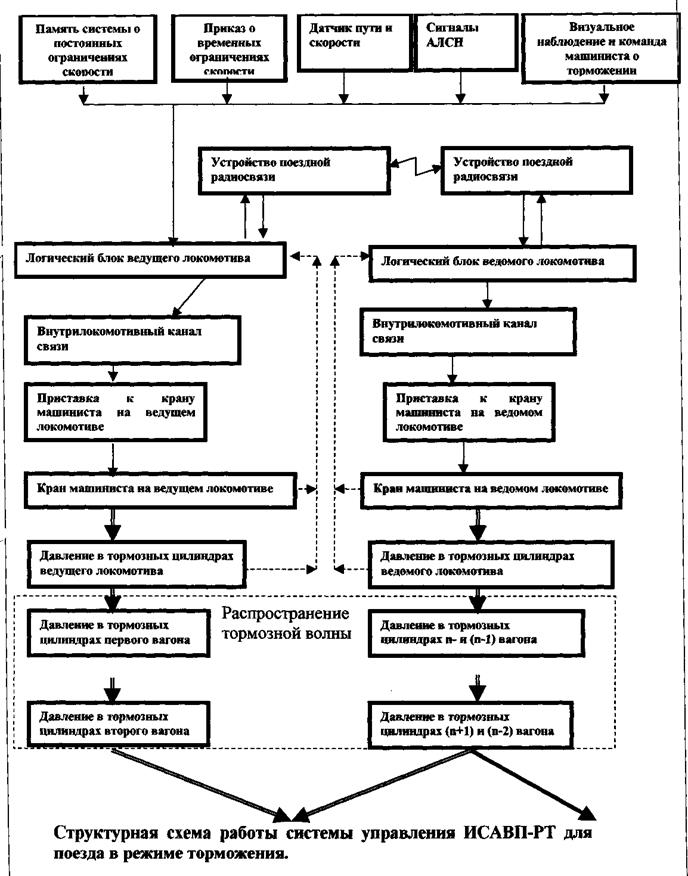
Интеллектуальная система автоматического ведения грузового поезда позволяет управлять разгоном, поддержанием допустимой скорости движения поезда, рекуперативным и пневматическим торможением вплоть до полной остановки, как одиночного, так и длинносоставного тяжеловесного поезда с объединенной тормозной магистралью и распределенными по длине поезда локомотивами.
При этом второй и последующие локомотивы управляются с головного по радиоканалу.
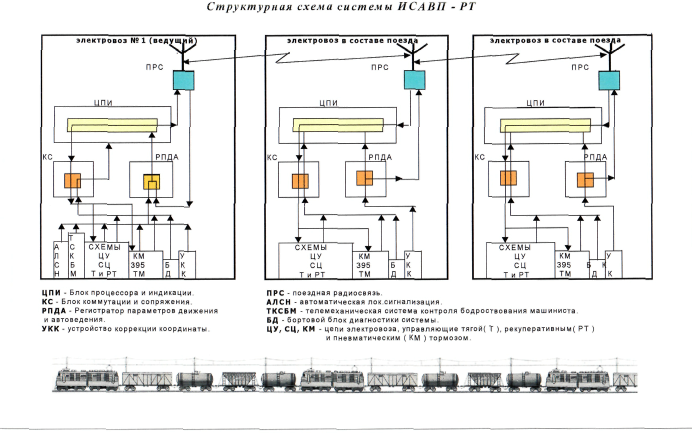
Управляющие команды вырабатываются на борту головного электровоза блоком центрального процессора и индикации (ЦПИ) с учетом параметров длинносоставного поезда, места и количества в составе поезда электровозов,
допустимой скорости движения, показаний автоматической локомотивной сигнализации, обеспечения продольных сил в составе поезда в пределах
допустимых по безопасности движения значений, оптимального использования электроэнергии на тягу поезда при выполнении заданных графиком движения времен хода.
Особенностью автоматизированного управления длинносоставным тяжеловесным поездом является асинхронная работа в режиме тяги электрических силовых цепей головного и последующих электровозов, как в текущем времени, так и по токовым нагрузкам при согласованной работе в режиме торможения кранов машиниста объединенной пневматической тормозной магистрали поезда.
|
|
|
Информация о параметрах поезда, допустимых скоростях, и расписании движения с помощью блока клавиатуры (БК) вводится машинистом в блок центрального процессора и индикации — ЦПИ.
Блок центрального процессора и индикации ЦПИ путем увязки поступившей информации вырабатывает адресуемый для каждого электровоза алгоритм автоведения, передает его в блок коммутации и сопряжений - КС, обеспечивает визуальную и речевую информацию машиниста об исправности электровозов, и условиях ведения поезда. Блок КС после приема алгоритмов автоведения от ЦПИ формирует сигналы управления электровозами и передает в бортовые цепи для головного электровоза по проводам. Для второго и последующего локомотивов. Управляющая и согласующая информация передается по радиоканалу.
В систему входят:
-блок центрального процессора и индикации — ЦПИ;
-блок коммутации и сопряжения КС;
- блок регулирования возбуждения возбудителя — БРВВ;
- регистратор параметров движения поезда и автоведения—РПДА—ПГ;
- устройство коррекции координаты положения электровоза — УКК;
- блок клавиатуры — БК;
- устройство включения системы — УВС;
- звуковая колонка;
- дистанционно управляемый кран машиниста усл. №395;
-датчики тока, напряжения, давления, пути, скорости, подачи песка;
- соединительные кабели;
- блоки радиоканала;
- программное обеспечение.
Система получает питание от бортовой сети напряжением 35-65В, мощность не более 100 Вт.
Передача данных по цифровому защищенному радиоканалу на несущих частотах диапазона 151 - 152 МГц.
Система ИСАВП-РТ позволяет обеспечить:
• повышение пропускной способности участков
железных дорог до 4-6%;
• кратное повышение производительности труда
локомотивных бригад;
• безопасное вождение соединенных поездов без
локомотивных бригад на втором и третьем
локомотивах;
сокращение оборота подвижного состава до 20% за счет повышения маршрутной скорости до 1000 км/сутки; экономию электроэнергии до 8-10%.
|
ЭММ
Электронный маршрут машиниста поезда пассажирского движения
Подготовка маршрутного листа машиниста является трудоемким процессом, требующим получения информации от целого ряда служб. Программно-аппаратная система и технология формирования электронного маршрутного листа машиниста (ЭММ) обеспечивает исключение человеческого фактора при подготовке и закрытии маршрутного листа. Она позволяет с высокой точностью зафиксировать в нем фактическое исполнение графика движения и потребленную электрическую энергию с разделением суммарной на тягу и отопление по конкретной поездке.
Единая база данных, позволяет получить централизованный доступ к информации из маршрутных листов, исключает неоправданное дублирование этой информации, сокращает временные, трудовые и материальные затраты. Система ЭММ позволяет облегчить подготовку систем автоведения к конкретной поездке, автоматизируя процесс ввода информации в УСАВПП по предстоящему маршруту, включая и список временных ограничений скорости.








