 2015-10-13
2015-10-13 2633
2633В схеме коррекции с обратной связью (рис. 7-6,а) КУ вводится в систему, охватывая обратной связью часть системы с передаточной функцией  . Поскольку отрицательная корректирующая обратная связь уменьшает влияние охваченной частина характеристики системы, то стремятся охватывать обратной связью элементы с наименее стабильными характеристиками (электронные усилители, коллекторные двигатели и т. п.).
. Поскольку отрицательная корректирующая обратная связь уменьшает влияние охваченной частина характеристики системы, то стремятся охватывать обратной связью элементы с наименее стабильными характеристиками (электронные усилители, коллекторные двигатели и т. п.).
Различают коррекцию жесткими и гибкими обратными связями. Жесткая обратная связь (ж.о.с.) действует как в переходных, так и в установившихся режимах, а гибкая обратная связь (г.о.с.) — только в переходных режимам (рис. 7-6,б). Ввиду того, что при отрицательной ж.о.с, статический коэффициент усиления охваченной части системы уменьшается, это приводит к увеличению (см. пример 6-2) ошибок скорректированной системы, что порой нежелательно. Вследствие этого получила на практике большое распространение коррекция с помощью г. о. с. Рассмотрим методику нахождения КУ. Из схемы рис. 7-6,а имеем

|
|
|
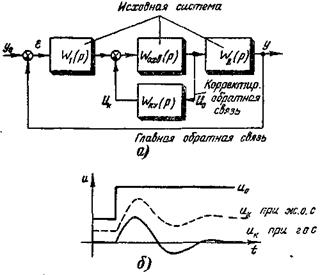
Рис. 7-6
Как видим из последнего выражения, оно неудобно для использования ЛАЧХ. Однако, если в некотором диапазоне частот требуется обеспечить
 , (7-7)
, (7-7)
то это возможно, когда
 или
или  (7-8)
(7-8)
Наоборот, если в другом диапазоне частот
 или
или  , (7-9)
, (7-9)
то
 .
.
Таким образом, действительно, характеристики скорректированной системы могут не зависеть от охваченной части системы, при определенных выше условиях. Из (7-10) получаем возможность найти  . Частоты
. Частоты  ,
,  , при которых
, при которых  , т. е. границы диапазонов частот, в которых выполняется или (7-8), или (7-9), называются сопрягающими при коррекции обратной связью. Удобно воспользоваться таким порядком построения :
, т. е. границы диапазонов частот, в которых выполняется или (7-8), или (7-9), называются сопрягающими при коррекции обратной связью. Удобно воспользоваться таким порядком построения :
1. Строится ЛАЧХ исходной системы  .
.
2. Строится по ТЗ ЛАЧХ скорректированной системы  .
.
3. Находится в соответствии с (7-10), т. е. при условии (7-9) для некоторого диапазона частот [ , ], суммарная ЛАЧХ

4. Намечается, исходя из технических возможностей и нестабильности характеристик, охваченная часть системы и строится для нее  .
.
5. Находится для диапазона частот [ , ]

и достраивается вне этого диапазона таким образом, чтобы выполнялось условие (7-8).
6. По подбирается само КУ. Если оно оказывается нереализуемым, то выбирается другой вариант охваченной части системы.
Пример 7-2. Рассмотрим коррекцию следящей системы (рис. 1-10,б). Структурная схема ее показана на рис. 7-4. Исходная система имеет те же характеристики, что и в примере 7-1; условия ТЗ те же. Тогда, найдя координаты контрольной точки, увеличиваем /коэффициент усиления в исходной системе так, чтобы полученная  не заходила в запретную область (рис. 7-7,а). Строим
не заходила в запретную область (рис. 7-7,а). Строим  по ТЗ. Очевидно, что в диапазоне частот,
по ТЗ. Очевидно, что в диапазоне частот,  . В области средних частот асимптоту с наклоном
. В области средних частот асимптоту с наклоном  дб/дек проводим по запретной области с одной стороны и до пересечения с — с другой. Сопрягающую асимптоту проводим по границе запретной области. Тогда получаем сопрягающие частоты при коррекции обратной связью
дб/дек проводим по запретной области с одной стороны и до пересечения с — с другой. Сопрягающую асимптоту проводим по границе запретной области. Тогда получаем сопрягающие частоты при коррекции обратной связью  . В этом диапазоне находим
. В этом диапазоне находим  . Охватываем тахометрической обратной связью усилитель, ЭМУ и двигатель. Следовательно,
. Охватываем тахометрической обратной связью усилитель, ЭМУ и двигатель. Следовательно,
|
|
|
 ,
,
где  .
.
Строим  и находим
и находим  в диапазоне частот
в диапазоне частот  . Наиболее простое КУ получится, если вне указанного диапазона проходит, как на рис. 7-1,а (пунктир). В этом случае удовлетворяется и условие (7-8).
. Наиболее простое КУ получится, если вне указанного диапазона проходит, как на рис. 7-1,а (пунктир). В этом случае удовлетворяется и условие (7-8).
Таким образом, останавливаемся на этом варианте, тогда
 ,
,
что соответствует гибкой обратной связи. Реализация КУ показана на рис. 7-7,б, при этом, ввиду того что  , обратная связь осуществляется без усилителя. Сигнал и к подается с КУ н точки
, обратная связь осуществляется без усилителя. Сигнал и к подается с КУ н точки  исходной схемы (рис. 1-10,б).
исходной схемы (рис. 1-10,б).
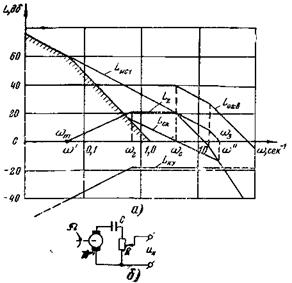
Рис 7-7

