 2015-10-13
2015-10-13 6653
6653НАЗНАЧЕНИЕ: предназначен для дистанционного ручного управления реверсорами, регулирования силы тяги и торможения.
УСТРОЙСТВО: является групповым аппаратом с ручным управлением. Состоит из двух переключателей кулачкового типа: реверсивного 3 и главного 1 и датчика скорости 9.
В основаниях 2, 5 и 10 установлены:
- Реверсивный вал имеет 4 кулачковых элемента и служит для изменения направления движения электровоза и имеет следующие позиции:
«В» - вперед;
«0» - нулевое положение;
«Н» - назад.
-
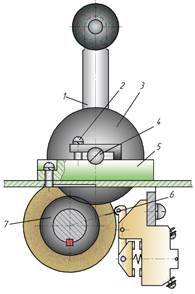 Главный вал имеет 6 кулачковых элемента и служит для управления электровозом в режимах «Тяга» и «Торможение» и имеет следующие позиции:
Главный вал имеет 6 кулачковых элемента и служит для управления электровозом в режимах «Тяга» и «Торможение» и имеет следующие позиции:
«Тяга» - зона задания силы тяги;
«П» - подготовка схемы в режиме «Тяга»;
«0» - нулевое положение;
«П» - подготовка схемы в режиме «Рекуперация»;
«Рекуперация» - зона задания силы торможения.
- Датчик скорости служит для задания максимальной скорости движения электровоза.
На верхней раме 6 расположены рукоятки реверсивного вала 7, штурвала главного вала 8 и задатчика скорости 9. Фиксация валов на позициях осуществляется при помощи фигурных дисков и рычагов с пружинами. Рукоятка реверсивного вала извлекается в положении «0».
Реверсивный и главный валы имеют механизм блокирования, состоящий из дисков и рычага, который обеспечивает невозможность установки штурвала в рабочее положение при положении «0» реверсивной рукоятки.
РАБОТА: при перемещении рукоятки штурвала 1, вращается и зубчатое колесо 3, закрепленное на оси 4 в корпусе 5. Зубчатое колесо входит в зацепление с шестерней 7 на главном валу и поворачивает ее. При повороте кулачковых шайб 6 главного вала переключаются кулачковые элементы, обеспечивая сбор цепей управления.








