 2015-10-13
2015-10-13 532
532На відміну від двопозиційної (бінарної) дискретної ЧМ, де використовується ансамбль, що складається з двох сигналів s 1(t) і s 2(t), при багаточастотному методі по лінії (каналу) передають т сигналів з ансамблю n сигналів, які визначаються кількістю використовуваних частот:
| s 1(t), s 2(t), …, sn (t). | (7.1) |
Для розрізнення приймачем сигналів на фоні завад, що діють в каналі, задають статистику перешкод і апріорні ймовірності Р 1, Р 2..., Рn посилання всіх n сигналів. Приймач розрізняє сигнали на заданому інтервалі спостереження [ T 1, Т 2] і за прийнятою реалізацією u (t)приймає рішення про те, який з n сигналів було передано.
Вектори багаточастотних сигналів зображено на рис. 7.3, де геометрично кожному одночастотному сигналу з ансамблю (7.1) відповідає вектор в просторі.
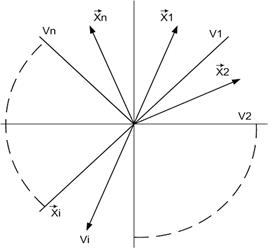
Рис. 7.3. Вектори багаточастотних сигналів
Вектори сигналів, що займають в просторі певне положення, можуть бути визначені в деякому вирішальному об'ємі Vi простору. Об'єм, в якому діє сигнал, визначається взаємодією векторів сигналу й завади. Об'єми Vi в загальному випадку можуть накладатися один на одного. Для розрізнення сигналів в приймачі кожному вектору сигналу si (t)ставиться у відповідність свій об'єм Vi. При попаданні результуючого вектора прийнятого сигналу si (t)і завади ζ (t)в об'єм Vi, що відповідає сигналу, цей сигнал буде прийнято правильно. Якщо результуючий вектор дії сигнала й завади потрапить в сусідній об'єм Vj, j ≠ i, то приймач видасть помилкове рішення. Припустимо, що сигнали ансамблю (7.1) мають однакові тривалість Т = t 2 – t 1і спектр частот F. Тоді відстань між двома сигналами залежатиме від довжин векторів і кута між ними. Через випадковий характер вектора завади його взаємодія з вектором сигналу дає результуючий вектор, який може мати будь-яку величину й напрям. При цьому виникає область невизначеності, в яку потрапляють прийняті сигнали x (t) = s (t) + ζ (t). Взаємодію сигналу й завади зручно виразити оператором
x (t) = ψ (s (t), ζ (t)),
де ψ — оператор, що перетворює простір сигналів s (t)в простір прийнятих сигналів x (t).
Під дією завад може спостерігатися помилкове відтворення прийнятого повідомлення. Якщо прийнятий вектор x (t)виявиться ближче до кінця того вектора s (t), який в даний момент часу не передається, то приймач зафіксує помилку. Ймовірність виникнення помилки залежатиме від відстані dij між сигналами і зменшується із збільшенням dij. Відстань dij, у свою чергу, залежить від методу модуляції й тривалості повідомлення. Розрізнення сигналів можливе лише при dij > 0. Відстань між будь-якою парою векторів сигналів запишеться як
 . .
| (7.2) |
Зведемо цей вираз до вигляду
| (7.3) |
або
 ,
,
де Еi, Еj — енергія сигналів si (t)і sj (t)відповідно, а останній доданок визначає взаємну кореляцію між цими сигналами.
Якщо Еi = Еj = Е, то
 ,
,
де  — коефіцієнт кореляції сигналів.
— коефіцієнт кореляції сигналів.
З виразу (7.3) випливає, що ступінь розрізнення сигналів повністю визначається коефіцієнтом взаємної кореляції pij. Для розрізнення сигналів достатньо, щоб вони були ортогональними. При цьому виконується умова
Для ансамблю (7.1), що складається з двох сигналів (бінарні системи), максимальна розрізнюваність достягається використанням протилежних сигналів, тобто
si (t) = – sj (t).
Для розрізнення сигналів, спектри яких під дією завад частково перекриваються, необхідно обчислити коефіцієнти рij для всіх можливих сигналів. Зразки цих сигналів мають знаходитися в приймачі.
Максимальну завадостійкість при прийомі сигналів, спотворених завадами, можна отримати при використанні ідеального приймача Котельникова. В основі його дії під час приймання дискретних сигналів лежить порівняння прийнятого сигналу зі всіма можливими значеннями переданого сигналу, не спотвореного перешкодою, тобто із зразками сигналу, і обчислення енергії різниці між ними. Приймач відносить прийнятий сигнал до того з них, для якого ця енергія буде мінімальною. Реалізація ідеального приймача Котельникова пов´язана з багатьма труднощами. Тому на практиці застосовуються так звані квазіоптимальні приймачі, що мають простіше схемне рішення й забезпечують завадостійкість, близьку до потенційної.
При будуванні приймачів багаточастотних сигналів необхідно забезпечити не тільки взаємодію великої кількості смугових фільтрів, але й упевнений прийом різних за рівнем частотних сигналів. Як приклад наведемо приймач з узагальненою диференційною схемою (УДС), структурну схему якого показано на рис. 7.4.
Рис. 7.4. Структурна схема приймача багаточастотних сигналів
Багаточастотні сигнали, що містять т частот
(де т =1, 2,..., n/2) з ансамблю n частот (7.1), які використовуються для передачі інформації, надходять на входи смугових фільтрів(СФ).Частотні сигнали появляються на виходах т з n смугових фільтрів і подаються на випрямлячі Вi. З виходу випрямлячів сигнали надходять на УДС, яка виконується у вигляді матриці.
При цьому випрямлені m -частотні сигнали подаються на диференційну схему так, щоб з корисного сигналу відбиралася найбільша випрямлена напруга завади, що надходить від одного з (n – т) неробочих СФ, резонансні частоти яких не збігаються з частотами m -частотного сигналу, що приймається в даний момент. Це дає можливість протягом часу прийому m -частотного сигналу виключити помилкові спрацьовування (n – т) порогових елементів, установлених на виході приймача.
Структурна схема УДСбудується так, щоб усі порогові елементи (ПЕi, i =  ) смугових фільтрів, резонансні частоти яких не збігаються з робочими, були замкнені на час прийому m -частотного сигналу. Реалізація УДС залежить від загальної кількості частот n і кількості частот т у багаточастотних сигналах, що приймаються і поступають на вхід приймача.
) смугових фільтрів, резонансні частоти яких не збігаються з робочими, були замкнені на час прийому m -частотного сигналу. Реалізація УДС залежить від загальної кількості частот n і кількості частот т у багаточастотних сигналах, що приймаються і поступають на вхід приймача.
Застосування приймача з УДС єбажаним у тих випадках, коли потрібно отримати високу завадостійкість. Проте виграш в завадостійкості веде до зниження швидкості передавання інформації. Для підвищення швидкості оброблення багаточастотних сигналів широко застосовують цифрові методи.








