 2015-10-22
2015-10-22 1245
1245Рассмотрим основные термины.
Звено механизма твердое тело,входящее в состав механизма.Звено может содержать одну или несколько деталей, соединенных жестко между собой.
Стойка неподвижное звено механизма.
Входное звено звено,которому сообщается движение,преобразуемое механизмом в требуемые движения других звеньев.
Выходное звено звено,совершающее движение,для выполнения которогопредназначен механизм.
Кинематическая пара соединение двух соприкасающихся звеньев,допускающее их относительное движение.
Элемент кинематической пары совокупность поверхностей,линий и отдельных точек звена, по которым оно соприкасается с другим звеном.
В высших кинематических парах элементом соприкосновения является линия или точка.
В низших кинематических парах элементом соприкосновения является поверхность.
Числом степеней свободы механической системы называется число независимых параметров, определяющих положение системы.
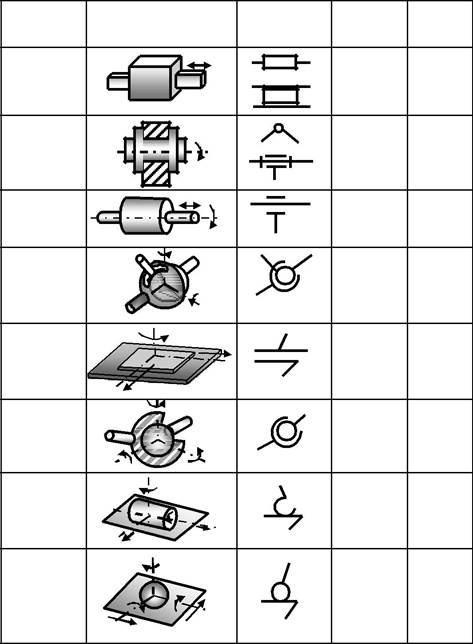
По числу степеней свободы в относительном движении звеньев кинематические пары делятся на одно -, двух -, трех -, четырех и пятиподвижные, которые налагают на относительное движение звеньев соответственно пять, четыре, три, две и одну связь. Изображения и характеристики некоторых кинематических пар приведены в таблице 1.1.
|
|
|
В плоских механизмах траектории движения точек всех звеньев находятся в параллельных плоскостях. В противном случае механизм является пространст-
венным.
| Виды кинематических пар | Таблица 1.1 | ||||
| Название | Конструктивное | Условное | Число | Число | |
| изображение | изображение. | степеней | связей | ||
| свободы | |||||
| Поступа- | |||||
| тельная | 1 | 5 | |||
| Враща- | |||||
| тельная | 1 | 5 | |||
| Цилиндри- | 2 | 4 | |||
| ческая | |||||
| Сфериче- | |||||
| ская с | 2 | 4 | |||
| пальцем | |||||
| Плоскост- | |||||
| ная | 3 | 3 | |||
| Сфериче- | |||||
| ская | 3 | 3 | |||
| Цилиндр | 4 | 2 | |||
| плоскость | |||||
| Шар – | |||||
| плоскость | 5 | 1 |
| Число степеней свободы пространственного механизма без избыточных | |||||||
| связей определяют по формуле А.П. Малышева: | |||||||
| W 6 n 5 p 14 p 23 p 32 p 4 p 5, | |||||||
| где n – число подвижных звеньев; | |||||||
| р 1 | число одноподвижных кинематических пар; | ||||||
| р 2 | число двухподвижных кинематических пар; | ||||||
| р 3 | число трёхподвижных кинематических пар; | ||||||
| р 4 | число четырёхподвижных кинематических пар; | ||||||
| р 5 | число пятиподвижных кинематических пар. | ||||||
| Число степеней свободы плоского механизма определяют по формуле | |||||||
| П.Л. Чебышева: | |||||||
| W = 3n 2p1 | p2. | ||||||
| Рычажные механизмы содержат только низшие кинематические пары. | |||||||
| В состав рычажных механизмов могут входить следующие звенья. | |||||||
| Кривошип звено,которое может совершать полный оборот вокруг стойки. | |||||||
| Коромысло звено, | образующее вращательную пару со стойкой и не спо- | ||||||
| собное проворачиваться на полный оборот. | |||||||
| Шатун звено,не входящее в кинематическую пару со стойкой. | |||||||
| Ползун звено,образующее поступательную пару со стойкой. | |||||||
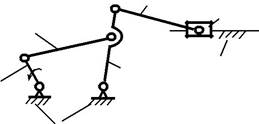
| При изображении механизма на чертеже применяют структурную схему с | |||||||
| использованием условных изображений звеньев без соблюдения их размеров и | |||||||
| кинематическую схему с соблюдением размеров звеньев,необходимых для кине- | |||||||
| матического исследования. На рис. 1.2 приведён пример структурной схемы ме- | |||||||
| ханизма качающегося конвейера с указанием названий звеньев. | |||||||
| D | 4 (шатун) | ||||||
| 2 (шатун) | В | Е | 5 (ползун) | ||||
| А | 0 (стойка) | ||||||
| 1 (кривошип, | О | С | 3 (коромысло) | ||||
| начальное | |||||||
| звено) | 0 (стойка) | ||||||
| Рис. 1.2. Механизм качающегося конвейера | |||||||
| Обобщенными координатами механизма называют независимые между со- | |||||||
| бой координаты (угловые или линейные), определяющие положения всех звеньев | |||||||
| механизма относительно стойки. | |||||||
| Начальным звеном механизма называется звено,которому приписывается | |||||||
| одна или несколько обобщенных координат. |
|
|
|
Структурной группой (группой Ассура) называется элементарная кинема-
тическая цепь, число степеней свободы которой относительно элементов её внешних кинематических пар равно нулю.
Образование сложных плоских рычажных механизмов осуществляется путем присоединения к начальному звену и стойке одной или нескольких струк-турных групп (принцип Ассура).
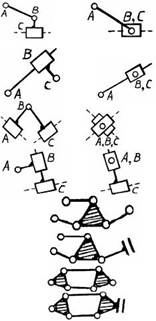
Структурные группы делятся между собой на классы. В таблице 1.2 пока-заны пять видов структурной группы второго класса и некоторые виды структур-ных групп третьего и четвертого классов.
| Классификация структурных групп | Таблица 1.2 | ||||||
| Класс | Вид | Схема | Число | Число | |||
| звеньев | пар | ||||||
| В2-2В | |||||||
| В2-2П | |||||||

 Класс механизма определяется наивысшим классом структурной группы,входящей в его состав.
Класс механизма определяется наивысшим классом структурной группы,входящей в его состав.








