 2015-10-22
2015-10-22 5513
5513СОДЕРЖАНИЕ
ПЕРЕЧЕНЬ СОКРАЩЕНИЙ.............................................................................. 5
ВВЕДЕНИЕ................................................................................................... 7
Глава 1 Состояние проблемы информатизации сортировочных станций
и интеллектуализации процессов принятия решений............................... 13
1.1 Современный уровень информатизации отечественных
и зарубежных СС................................................................................................................... 15
1.2 Анализ состояния проблемы интеллектуальной поддержки принятия решений на отечественных СГ.................................................................................................................. 23
1.3 Зарубежный опыт автоматизации и информатизации СГ.......................... 31
1.4 Новый подход к информатизации СС на основе ИВК-АДК........................ 38
Глава 2 Теоретические аспекты построения подсистем информатизации
с интеллектуальной поддержкой принятия решений................................ 41
2. 1 Особенности объекта информатизации как сложной
мультиагентной системы реального времени............................................................... 41
2.2 Методология исследования и разработки ПИ............................................. 44
2.3 Пространственно-временные модели – основа мониторинга оперативно-технологических ситуаций на СС...................................................................................................................... 53
2.4 Методика количественной оценки информационно-логической сложности принятия решений.................................................................................................................................. 61
2.5 Алгоритмы автоматической поддержки принятия решений, реализуемые ПИ ПФ 67
2.6 Алгоритмы автоматической поддержки принятия решений
в процессе роспуска составов............................................................................................ 75
Глава 3 Технические решения и технология создания подсистем информатизации 88
3.1 Техническая структура ПИ на основе ИВК-АДК............................................ 88
3.2 Структурно-функциональная компоновка ПИ на базе одноплатных ПК
и интерфейсных модулей сопряжения с устройствами СЦБ....................................... 92
3.3 Техническая структура интеграции ПИ в ЛВС Ethernet............................. 114
3.4 Окна визуализации технологических ситуаций в ПП и ПО..................... 118
3.5 Отображение результатов информатизации ПФ, СГ и автоматической поддержки принятия решений на АРМах ДСЦ и ДСПГ..................................................................................... 130
ЗАКЛЮЧЕНИЕ......................................................................................... 141
БИБЛИОГРАФИЧЕСКИЙ СПИСОК.............................................................. 143
ПЕРЕЧЕНЬ СОКРАЩЕНИЙ
RL, RT, RП и Rl – отношения в БЗ соответственно пространственные, временные, причинно-следственные и лингвистические.
АДК-СЦБ – система автоматизации диагностирования и контроля устройств СЦБ.
АРМ ДК-ШНГ – АРМ диагностирования и контроля электромеханика горки.
АРМ ДСПГ – АРМ дежурного по горке.
АРМ УП – АРМ удаленного пользователя.
АРС – автоматическое регулирование скоростей.
АСО УП – автоматизированная система оперативного управления перевозками.
АСУ СС – автоматизированная система управления СС.
АЦП – аналого-цифровые преобразователи.
БА – блок автоматики.
ББП – блок бесперебойного питания.
БД, БЗ – соответственно база данных и база знаний.
БЛС – блок локальной сети.
БПК – блок промышленного компьютера.
ГАЦ – горочная автоматическая централизация.
ГАЦ МП – ГАЦ микропроцессорная.
ГИР – график исполненной работы.
ДСО – датчик счета осей.
ДСС – модули дистанционного съема сигналов.
ДСЦ, ДСЦС – соответственно маневровый и станционный диспетчер.
ЕМСС – единая модель СС.
ИВК-АДК – информационно-вычислительный комплекс автомати-зации диагностирования и контроля.
ИНС – искусственная нейросеть.
ИУС-СС – информационно-управляющая система СС.
КГМ ПК – комплекс горочный микропроцессорный на базе ПК.
КДК-СС – контрольно-диагностический комплекс СС.
КДК-ШЧД – контрольно-диагностический комплекс диспетчера ШЧ.
КЗП – контроль заполнения путей.
КСАРМ – комплексная система АРМов.
КСАУ КС – комплексная система автоматического управления компрессорной станцией.
КСАУ СП – комплексная система автоматического управления сортировочным процессом.
КУ – контрольный участок.
ЛВС – локальная вычислительная сеть.
ЛП – лингвистические переменные.
ЛУИК – локальный информационно-управляющий комплекс.
МДВ, МАВ – модули соответственно дискретного и аналогового ввода сигналов.
НЛП – натурный лист поезда.
НМ – нечетное множество.
НО – напольное оборудование.
ОЗ – операторское звено.
ОИ – объект информатизации.
ОСРВ – операционная система реального времени.
ПИ – подсистема информатизации.
ПК – промышленный компьютер.
ПП, ПФ, ПО – парки СС соответственно прибытия, формирования
и отправления поездов.
РИС – радиолокационный измеритель скорости.
РТДС – радиотехнический датчик свободности.
РЦ – рельсовая цепь.
СГ – сортировочная горка.
СКАТИС – система контроля и анализа технологической информации станции.
СПД – система передачи данных.
СС – сортировочная станция.
СТДМ – система технического диагностирования и мониторинга.
СТЦ – станционный технологический центр.
ТНМ – теория нечетких множеств.
ТП – тормозная позиция.
УГР – модуль усиления удаленных сигналов с гальванической развязкой.
ФЭУ – фотоэлектрическое устройство.
ЦБС – центральный блок связи в составе ИВК-АДК.
ВВЕДЕНИЕ
Стратегия развития железнодорожного транспорта, принятия ОАО «РЖД» на заключительном этапе реформирования, предусматривает решение в первую очередь трех ключевых задач, к которым относятся:
- обеспечение роста эффективности, устойчивости и безопасности перевозок;
- развитие новейших систем управления технологическими процессами на основе инновационных технологий;
- снижение негативного влияния «человеческого фактора» за счет внедрения современных информационных и компьютерных технологий.
В такой постановке задач одним из приоритетных направлений работ является повышение эффективности процессов расформирования и формирования поездов на СС за счет совершенствования технологии оперативного управления, а также развития и перевооружения средств автоматизации и информатизации на уровне ХХI века [7, 15].
Для достижения этих целей во ВНИИАС разработана «Программа совершенствования и развития сортировочных станций железных дорог
на 2006 – 2015 годы», которая предусматривает «расширение зоны автоматизации и контроля на всю территорию станции, построение систем мониторинга на базе модульных подсистем реального времени, объединённых
с исполнительными устройствами, разработку АРМов различной ориентации…».
В рамках «Программы информатизации станций» Департаментом управления перевозками ОАО «РЖД» особое внимание уделено вопросам повышения качества первичной информации в АСУ перевозочным процессом на основе автоматического информирования и съёма с устройств СЦБ.
Детализируя задачи информатизации, в числе первоочередных работ можно отметить следующие:
- создание новых интеллектуальных АСУ;
- повышение достоверности информации в реальном масштабе времени о дислокации и наличии подвижных единиц;
- автоматический ввод в АСУ информации о перестановках вагонов на станции;
- создание графических и табличных интерфейсов по дислокации вагонов на путях;
- оборудование АРМов маневрового диспетчера дополнительными мониторами и информационными экранами, дающими достаточную информацию для планирования и управления маневровой работой;
- автоматическое прогнозирование внештатных и опасных ситуаций.
В предлагаемом учебном пособии раскрываются реальные возможности и пути создания нового поколения интегрированной системы информатизации СС, базирующейся на локальных подсистемах сбора, обработки, преобразования и отображения оперативно-технологической информации в реальном масштабе времени. Современный уровень развития интеллектуальных технологий позволяет решать на основе интеграции БД и БЗ задачи автоматической поддержки принятия решений. Это направление работ нашло свое отражение в алгоритмах и моделях автоматического принятия решений в подсистемах информатизации парков СС и СГ.
В первой главе изложены результаты анализа состояния проблемы информатизации СС и СГ на отечественных и зарубежных железных дорогах.
Теоретическое обобщение состояния проблемы комплексной автоматизации и информатизации отечественных СС на базе компьютерных технологий выявило ее нерешенность в контексте достижения единого информационного пространства и ведения непрерывной динамической модели процесса расформирования и формирования поездов в реальном режиме времени.
Анализ зарубежных информационно-управляющих систем СС
Германии, Франции и США выявил общую тенденцию создания распределенных локальных подсистем, ориентированных на сбор первичной информации в парках приема, формирования и отправления поездов. Установлено использование «интеллектуальных узлов», ориентированных
на интеллектуализацию процессов принятия решений.
При высокой функциональной развитости систем автоматизации отечественных горок (КГМ-ПК, ГАЦ-МП и др.) проблема их интеллектуализации остается открытой.
Результаты анализа и обобщения проблемы позволили сформулировать основные направления теоретических и экспериментальных исследований при построении интегрированной с АСУ СС и устройствами СЦБ системы информатизации СС с функциями мониторинга технологических ситуаций в парках, на СГ и автоматической поддержки принятия решений.
Завершает обзорную и постановочную главу впервые предложенная идея нового подхода к информатизации СС на основе широко внедряемого (в рамках АДК-СЦБ) информационно-вычислительного комплекса автоматизации диагностирования и контроля устройств СЦБ ИВК-АДК. Здесь, кроме решаемых «собственных» задач технического диагностирования и мониторинга состояния устройств СЦБ ИВК-АДК, целесообразно «поручить» задачи информатизации, мониторинга реально складывающихся оперативно-технологических ситуаций в парках и на СГ, а также функции автоматического принятия решений и выдачи рекомендаций диспетчерскому (дежурному) персоналу через сеть общего назначения.
Вторая глава содержит теоретические аспекты построения ПИ с интеллектуальной поддержкой принятия решений. С учетом особенностей объекта информатизации как сложной мультиагентной системы реального времени предложена методология и структура этапов теоретических исследований. Показано, что в основу достижения цели положена интеграция БД и БЗ. Под интеграцией понимается комбинированное использование разнотипных моделей и методов обработки информации.
Создание БЗ ставит задачу достижения интеллектуализации системы, под которой понимается использование различных форм знаний при обработке информации и моделей их представления в виде совокупности правил – продукций [2].
В основу мониторинга оперативно-технологических ситуаций на СС положено использование пространственно-временных моделей перемещения подвижных единиц в парках и на спускной части СГ. Теоретической базой исследования такого класса моделей является ситуационное управление [11].
Описание формально-логических моделей на основе машины вывода подкреплено конкретными примерами формализованного представления перемещения вагонов.
Учитывая человеко-машинную структуру создаваемой системы, методология ее построения предусматривает использование инженерно-психологических теоретических подходов оценки предельных информационно-логических возможностей диспетчерских (дежурных) звеньев на этапе принятия решений. Для этого предложена методика количественной оценки сложности реализации алгоритмов действия ДСЦ и ДСПГ. На примерах исследования конкретных алгоритмов установлен перечень задач, решение которых необходимо передать автомату. Для этого в учебном пособии дано описание предлагаемых алгоритмов автоматического выбора очередности роспуска составов, выбора маршрутов заезда маневровых локомотивов в подгорочном парке и выходной горловине парка формирования. Автоматизация процесса принятия решений ДСПГ при выборе путей отсева «чужаков» при сбоях и нарушениях программы роспуска обусловила необходимость разработки алгоритмов ведения ситуационной модели подгорочного парка и автоматического поиска наиболее оптимального варианта нормализации сбоев.
Завершающая глава учебного пособия содержит предлагаемые технические решения и технологию функциональной компоновки ПИ с функциями автоматической поддержки принятия решений.
Практическая реализация ПИ на СС должна предусматривать два варианта технических решений:
- на основе уже функционирующих АДК-СЦБ;
- на базе самостоятельных одноплатных ПК, увязанных с релейно-контактной аппаратурой ЭЦ парков СС и УВК системы автоматизации СГ.
Первый вариант решается без параллельной компоновки технических средств ПИ и предусматривает лишь расширение функций АДК-СЦБ (в частности ИВК-АДК) на алгоритмическом уровне.
Второй независимый вариант требует выбора и компоновки наиболее приемлемых ПК, средств сбора, преобразования, БД каждой ПИ, средств отображения ситуаций и графиков на мониторах АРМов, а также протоколирования результатов работы парков и СГ.
Исходя из такой концепции, ниже рассмотрены оба возможные варианты построения ПИ.
Предложена техническая структура интеграции локальных ПИ на базе современных одноплатных ПК, агрегатируемых с ИВК-АДК, имеющих свою БД и доступ к ЛВС Ethernet.
Для выбора функциональных элементов ввода, вывода, преобразования, отображения первичной информации от устройств СЦБ при независимом варианте построения ПИ в учебном пособии дано описание наиболее «ходовых» модулей, входящих в состав ИВК-АДК. Базовая техническая структура ПИ содержит:
- активную матрицу ввода сигналов от устройств СЦБ;
- контроллер сбора информации на базе ПК «Pentium-4» (2,4 ГГц);
- сервер БД и БЗ;
- АРМ;
- модемы взаимодействия с другими подсистемами;
- сетевой коммутатор.
Чтобы изложенному материалу учебного пособия придать практическую направленность, в последнем разделе дано описание «окон» визуализации оперативно-технологических ситуаций в парках СС и на СГ. К ним
относятся:
- графики обработки составов в ПП и ПО;
- горячие справки по прибывшим поездам;
- ситуационные матрицы с отображением непредвиденных работ
в парках;
- подход поездов;
- заполнение путей и окна, требующие осаживания и подтягивания вагонов;
- текущее накопление составов;
- состояние подгорочного парка;
- накопление составов в ПФ;
- разложение вагонов по путям;
- рекомендации дежурному персоналу на этапе принятия решений;
- итоговые показатели работы парков СС.
Основная направленность разработанных технологических «окон» сориентирована на отображение в реальном времени состояния процесса расформирования и формирования составов и результатов автоматической поддержки принятия решений.
Глава 1 Состояние проблемы информатизации
сортировочных станций и интеллектуализации процессов
принятия решений
Ключевыми задачами заключительного этапа реформирования
железнодорожного транспорта являются: повышение эффективности и безопасности перевозок; внедрение инновационных проектов, а также развитие информационных и компьютерных технологий.
В контексте поставленных ОАО «РЖД» задач самое приоритетное значение для повышения эффективности грузовых перевозок занимает проблема совершенствования процессов оперативного управления СС,
которые являются важнейшим элементом технологического конвейера
перевозочного процесса. Время простоя вагонов на них составляет значительную долю оборота и существенно влияет на себестоимость перевозок.
Научные школы и производственные коллективы ведут непрерывный поиск путей совершенствования процессов расформирования и формирования поездов за счет внедрения новых методов и технологии управления, обновления и развития существующих АСУ и систем автоматики, телемеханики, напольного оборудования и исполнительных устройств [3, 6]. Однако к настоящему времени целый ряд научно-практических вопросов, направленных на использование новых информационных и компьютерных технологий, прогрессивных методов и моделей управления, не решены.
Бурное развитие информационно-вычислительных технических средств, появление мощных ПК, программируемых микроконтроллеров
и модулей сопряжения с устройствами СЦБ в настоящее время открыли широкие возможности создания нового поколения интегрированных систем информатизации, базирующихся на достоверных и своевременных данных «от колеса». Основное назначение такой системы – обеспечение
в рамках единого информационного пространства станции в реальном режиме времени ведения непрерывной динамической модели всего процесса расформирования и формирования поездов, начиная от прибытия составов и завершая отправлением вновь сформированных поездов со станции.
Решение такой глобальной задачи порождает необходимость проведения целого комплекса исследований и экспериментальных работ, обеспечивающих создание систем нового поколения [10].
С учетом уже накопленного опыта создания подобного класса сложных систем в других отечественных и зарубежных отраслях промышленности, транспорта такая система должна обеспечивать:
- на основе доступного интерфейса ПК с устройствами СЦБ непрерывный мониторинг оперативно-технологических (в том числе нештатных) ситуаций в пределах всей СС;
- интеллектуальную автоматическую поддержку принятия решений дежурного и диспетчерского аппарата;
- ведение прогнозирующих моделей состояния парков на этапе краткосрочного планирования маневровым или станционным диспетчерами;
- автоматическую выработку «советов» и рекомендаций руководителю смены в условиях возникающих размытых и нечётких оперативно-технологических ситуаций на СГ и в парках;
- ведение непрерывных локальных моделей перемещения подвижных единиц (вагонов, отцепов, локомотивов);
- автоматическое ведение графиков исполненной работы на основе фактического изменения состояния устройств СЦБ (реле, ДСО, РЦ, КЗП
и др.);
- формирование и отображение на АРМах технологических «окон», а также протоколирование показателей работы на текущей период и по окончанию смены;
- непрерывный обмен необходимыми пакетами данных с АСУ верхних уровней управления (АСУ СС, СКАТИС, АСО УП и др.);
- мониторинг состояния СС на АРМах УП;
- интеграцию с системой АДК-СЦБ.
Создание интегрированной системы информатизации СС с интеллектуализацией процессов принятия решений является важным этапом реализации принятой ОАО «РЖД» «Программы совершенствования и развития СС железных дорог на 2006 – 2015 годы».
Ниже приводится анализ состояния вышеизложенной проблемы и дано теоретическое обобщение направлений исследований в этой области на отечественных и зарубежных железных дорогах.
1.1 Современный уровень информатизации отечественных
и зарубежных СС
1 Идея интеграции существующих АСУ СС с устройствами СЦБ
относится к 90-м годам прошлого столетия [9]. Для ведения динамической модели работы СС специалистами отраслевой НИЛ «Микропроцессорные информационно-управляющие системы» РИИЖТа (ныне РГУПС) предлагалось создание ЛИУКов парков СС, взаимодействующих с устройствами СЦБ. Основные задачи таких комплексов состояли в регистрации временных параметров выполнения операций по обработке составов, подготовки их к роспуску и отправлению соответственно в ПП и ПО. ЛУИК ПФ должен обеспечивать автоматическое накопление составов по весу и длине, исходя из фактических данных скатывания отцепов с горки.
В силу различных причин (1991 год) предлагаемые разработчиками идеи создания ЛУИКов поддержки не получили. Одной из причин явилось отсутствие теоретических проработок и мощных информационно-вычислительных средств, позволяющих решать задачи информатизации в реальном масштабе времени. Теоретическая база и технология построения систем с искусственным интеллектом отсутствовала. Технические средства «МикроДАТ», на которые было сориентировано построение комплексов информатизации, устарели и были сняты с производства.
2 В начале 2000-х годов в публикациях [3] предложена обобщенная структура интегрированной ИУС СС (рис. 1.1), где предусмотрено создание локальных ПИ парков, взаимоувязанных с существующими устройствами ЭЦ и АСУ СС.
На рисунке цифрами обозначены: 1 – ПИ ПП; 2 – ПУ СГ; 3 – ПИ ПФ; 4 – ПИ ПО; 5 – модули сопряжения ПК с релейно-контактной аппаратурой; 6 – устройства ЭЦ; 7 – АРМы дежурных по паркам, ДСПГ и ДСЦ; 8 – АСУ СС; 9 – АСО УП.

Рис. 1.1. Обобщенная структура ИУС СС
По мнению авторов, такая многоуровневая структура должна обеспечить протекание всего процесса расформирования и формирования поездов в едином информационном пространстве. Ядро каждой ПИ (1, 3, 4) должен составлять ПК последнего поколения класса Pentium-4. В состав интерфейсных модулей 5 входят элементы ввода дискретной и аналоговой информации АЦП, оптоизолированные диодные матрицы и др. Цифрой 2 обозначена существующая система автоматизации СГ (например, КМГ ПК). В качестве АРМов могут использоваться персональные компьютеры непромышленного назначения.
Прогрессивным шагом в достижении целей интеллектуализации
такой ИУС-СС явилась постановка задачи интеграции БД и БЗ. Однако
с момента публикации такого подхода до настоящего времени теория
и технология создания ИУС СС остались на уровне идеи. Методология
и теоретические подходы к созданию ПИ, выбор технических средств увязки с устройствами ЭЦ, разработка моделей идентификации ситуаций, требующих интеллектуальной поддержки, системный анализ и исследование объекта информатизации как сложной мультиагентной системы, методы и алгоритмы автоматической поддержки принятия решений и др. остаются нерешенными.
Следует обратить внимание, что кроме теоретических проработок для реализации каждой ПИ необходимо решать следующие задачи:
- выбор информационно-вычислительного ядра (тип ПК, сетевое оборудование, модемы и др.);
- выбор интерфейсных модулей;
- компоновка и монтаж аппаратуры;
- увязка с релейными схемами и напольными датчиками;
- создание программного продукта.
3 Головная организация (Конструкторат) по автоматизации СС ВНИИАС считает проблему совершенствования процессов расформи-рования-формирования поездов самой приоритетной, что нашло свое
отражение в принятой ОАО «РЖД» «Программе совершенствования и развития СС железных дорог на 2006 – 2015 годы» [6]. Здесь предложена техническая структура комплексной системы автоматического управления сортировочным процессом КСАУ СП, представленная в учебном пособии в упрощенном виде (рис. 1.2).
Такая структура предполагает использование УВК со 100 %-ным
резервированием подсистем ГАЦ и АРС на базе современных ПК. Как следует из рисунка 1.2, одной из основных задач КСАУ СП является формирование модели реального времени, чего невозможно достичь без вновь создаваемых ПИ-парков. Прогрессивным шагом в развитии техники и технологии работы СС является использование спутниковой навигации, что поднимает КСАУ СП на принципиально новый уровень.
В подтверждение актуальности разработки ПИ авторы предлагаемой структуры отмечают [6] необходимость «осуществления управления на
основе непрерывного потока информации от датчиков…», а также «непрерывного функционирования систем управления технологическими
цепочками, которые охватывают процедуры расформирования и формирования составов от входной до выходной горловины станции…»
и «распространения зоны автоматизации управления движением вагонов и локомотивов с сортировочной горки на всю территорию станции, создания системы мониторинга и накопления вагонов в сортировочном парке…».
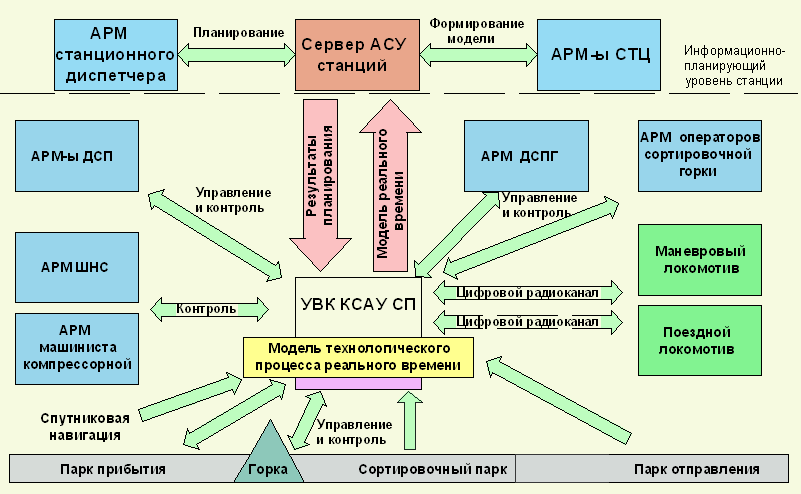
Рис. 1.2. Техническая структура интегрированной КСАУ СП
В подтверждение актуальности разработки ПИ авторы предлагаемой структуры отмечают [6] необходимость «осуществления управления на основе непрерывного потока информации от датчиков…», а также «непрерывного функционирования систем управления технологическими цепочками, которые охватывают процедуры расформирования и формирования составов от входной до выходной горловины станции…» и «распространения зоны автоматизации управления движением вагонов и локомотивов с сортировочной горки на всю территорию станции, создания системы мониторинга и накопления вагонов в сортировочном парке…».
Перечисленный комплекс системных, технических и технологических задач требует проведения теоретических исследований, создания методологии и технологии построения подсистем сбора информации и мониторинга оперативно-технологических ситуаций в парках и на СГ.
Особого внимания, на наш взгляд, заслуживают нерешенные вопросы интеллектуализации подсистем управления технологическими процессами в контексте автоматической поддержки принятия решений в сложных ситуациях в условиях дефицита времени. Отечественный и мировой опыт создания «умных» систем в других отраслях на современном этапе развития интеллектуальных технологий необходимо использовать при построении интегрированной системы информатизации СС.
В деятельности диспетчерского аппарата важное место занимают
вопросы прогнозирования поездной и маневровой работы, особенно для составления текущих планов на период 1 – 2 часа.
4 Программный комплекс СКАТИС, разработанный Центром информационных технологий ЦИТТРАНС, предназначен для автоматизированного построения, хранения и отображения ГИР по информации, поступающей в БД из КСАРМ в рамках действующих АСУ СС.
Графическая справочная система предназначена для получения динамической информации о наличии вагонов на станциях участков управления перевозками и на подходе к ним. Объектом слежения может быть станция в целом, парки станции, места подачи, подход к станции. Сведения по каждому объекту слежения выводятся на экран в отдельном окне, что позволяет одновременно получать информацию по нескольким объектам (например, по всем паркам станции – в одном окне, сортировочному парку – во втором, подходу по всем направлениям – в третьем и т.д.).
Количество и комбинации открываемых окон не ограничены. Выводимые на экран информационные данные могут быть представлены в виде графических разложений по коду груза, роду подвижного состава, государству-собственнику и коду грузополучателя, назначению.
На рабочих местах дежурных по паркам и ДСЦ представляется возможным открывать окна «Подход», «Парки», «Места подачи», «Станции» и др.
Окно «Парки» (рис. 1.3) предоставляет сведения о наличии поездов (групп вагонов) в парках (одном или всех) станции с вертикальным разложением по путям парка.
Рассмотренная информационно-справочная система является развитием существующих АСУ СС за счет «разложения по АРМам» информации, получаемой станцией от АСО УП.

Рис. 1.3. Технологическое окно «Парк» графической
справочной системы
Можно утверждать, что создание и внедрение информационно-справочной системы СКАТИС является реальным шагом комплексной
информатизации СС «сверху». Дежурному и диспетчерскому персоналу априори открывается перспектива состояния парков, поездной и маневровой работы после реального прибытия поездов для расформирования.
Интеграция такой системы с ПИ «снизу» становится гарантией достижения цели создания системы комплексной информатизации СС.
При увязке системы СКАТИС с ПИ реального времени открывается возможность автоматической корректировки технологических окон парков СС, что для диспетчерского персонала является крайне необходимым
и своевременным.
5 Представляет интерес обзор зарубежных систем автоматизации СС, анализ современных идей и подходов к решению комплексной компьютеризации в увязке с ПИ реального режима времени.
Обзор такого класса систем охватил период, начиная с 90-х годов по настоящее время. По имеющимся публикациям [1, 5, 12] были проанализированы структуры, функции и опыт эксплуатации следующих ИУС
и систем автоматизации СГ:
- микропроцессорная система управления СС «ADRS» (ФРГ);
- система диспетчерского управления СС «BLR» фирмы «Siemens»;
- интегрированная система централизованного управления СС «ITS» (ФРГ);
- система автоматизации «ATGS» (США);
- информационно-управляющая система «SPM» фирмы «Boston & Maine» (США);
- микропроцессорная система автоматизации сортировочных процессов фирмы «Saxbi» (Франция);
- мультимикропроцессорная система фирмы «Siemens» «MSR-32» (Германия);
- IBM – совместимая система автоматизации «DDC – III» (США).
Практически все известные зарубежные ИУС СС ADRS, BLR, ITS, TS 90, ATCS, SRM и др. по своей архитектуре являются двухуровневыми
и решают задачи обработки данных о прибывающих поездах и расформировываемых составах, учета данных о вагонопотоках, обработки информации об отправляемых поездах, расчета параметров технологического процесса, обработки статистических данных, определения структуры системы, диалога эксплуатационного персонала с системой формирования программы роспуска составов и ее реализации.
При анализе перечисленных систем автоматизации СС было установлено следующее [12]:
- общая тенденция автоматизации СС на зарубежных железных дорогах направлена на создание распределенных локальных подсистем, ориентированных на реализацию функций сбора, обработки и отображения оперативно-технологической информации в ПП, ПФ и ПО;
- архитектура ИУС СС представляет собой набор мультимикропроцессорных комплексов, взаимоувязанных между собой (по горизонтали), а также взаимодействующих с системами верхних уровней управления СС (по вертикали);
- локальные подсистемы имеют собственные БД о поездах (вагонах), непрерывно обновляющиеся для решения оптимизационных задач;
- модульность мультимикропроцессорных структур, использование 32-разрядных микро-ЭВМ, создание открытых сетей передачи данных,
а также применение локальных сетей открывают за рубежом широкую перспективу комплексной компьютеризации СС, крупных узлов и целых регионов железных дорог.
Анализ зарубежных систем автоматизации СС выявил общую тенденцию использования распределенных локальных подсистем в парках, ориентированных на реализацию функций сбора, обработки и отображения оперативно-технологической информации «по состоянию» в реальном
режиме времени.
Создание открытых СПД, применение ЛВС, использование 32-х или 64-х разрядных ПК, модульность мультимикропроцессорных структур
позволяют достичь интеграции 1-го (станционные устройства СЦБ) и 2-го уровня (АСУ, АРМы руководителей смен, СТЦ) управления.
1.2 Анализ состояния проблемы интеллектуальной
поддержки принятия решений на отечественных СГ
В общей структуре информатизации СС решающее значение имеет уровень развития алгоритмов автоматизации процессов принятия решений на СГ.
Из числа отечественных комплексов автоматизации сортировочных процессов ниже дан анализ КСАУ СП [16], которая в наибольшей степени готова к интеграции в комплексную систему информатизации СС. Это подтверждает техническая структура КСАУ СП, представленная на рис. 1.4, которая является наглядным примером интеграции подсистемы ГАЦ-МП (или подсистем двух СГ) с КСАУ КС, КСАРМами, АСУ СС и АДК-СЦБ парков СС.
Основным связующим звеном здесь является КДК СС, который,
в свою очередь, синтегрирован с КДК-ШЧД по каналам СПД.
Подсистема ГАЦ-МП базируется на двух БПК, решающих задачи контроля, управления и технической диагностики. В качестве информационно-вычислительных средств используется ПК класса «Pentium-4».
Для оценки уровня «интеллектуальности» КСАУ СП ниже рассмотрен перечень решаемых задач каждой из подсистем.
ГАЦ-МП автоматически контролирует показания сигналов постового и напольного оборудования для реализации функций управления маршрутами отцепов и контроля их накопления на подгорочных путях. ГАЦ-МП осуществляет информационную увязку с АСУ СС на терминале ДСПГ. Это дает возможность принимать и корректировать сортировочные листки, запрашивать информацию о состоянии ПП, передавать в АСУ СС информацию о поступивших на пути сортировочного парка вагонах.
С помощью функции формирования параметров отцепов на измерительном участке (номер вагона, количество осей, вес, особые признаки) и привязки их к программе роспуска можно менять в ходе роспуска маршруты
и их специализацию, восстанавливать маршрутные задания в случаях
нерасцепов и нагонов на спускной части горки. Благодаря функции автоматизированного управления маршрутами осуществляется управление стрелками согласно программе роспуска, сформированной по сортировочному листку с учетом корректирующих действий ДСПГ и команд ДСЦ.

Рис. 1.4. Техническая структура КСАУ СП
В маршрутном режиме управление стрелками происходит в соответствии с подготовленной ДСПГ последовательностью маршрутов или вводом в ходе роспуска маршрутных заданий отцепам, находящимся на измерительном участке. В ручном и автоматическом режимах роспуска выполняются контроль и протоколирование работы СГ. При этом стрелки под обычными и длиннобазными вагонами защищены от перевода, а при
маневровых передвижениях – от взреза.
На терминалах ДСПГ и операторов имеется индикация технологической информации (маршруты, состояние светофоров, РЦ и др.). Наглядное отображение всего технологического процесса обеспечивает возможность роспуска составов в условиях плохой видимости отцепов. Это достигается оптимальной компоновкой АРМов и табло коллективного пользования (рис. 1.5).

Рис. 1.5. Размещение АРМов на горочном посту
Технологические алгоритмы ГАЦ-МП позволяют контролировать
и диагностировать работу напольных горочных устройств и УВК.
В результате контроля состояния напольных устройств (светофоров,
датчиков, РЦ, радиотехнических датчиков и др.) можно протоколировать
и архивировать информацию о сортировочном процессе, а также роспуске состава на измерительном и стрелочных участках. Для эксплуатационного и оперативного персонала формируются сводки, отчетные формы и архивы роспусков составов.
Входящая в КСАУ СП подсистема автоматизации диагностирования и контроля горочных устройств АДК-СЦБ горки предназначена для диагностирования и автоматизации технического обслуживания горочных устройств СЦБ. Объектами диагностирования являются: стрелки, РЦ, светофоры, датчики-путевые, счета осей, РТДС, ФЭУ, ИПД, РИС, КЗП, воздушная магистраль, вагонные замедлители, весомеры, панели питания,
кабельные сети и др.
АДК-СЦБ горки выполняет функции формирования протоколов
мониторинга и диагностирования текущего и динамического состояния устройств, неисправности изолирующих стыков, прохождения отцепов по ТП, количества переводов стрелок и включений вагонных замедлителей, работы ДСО, логической свободности / занятости РЦ, потери контроля
положения стрелки и неисправности ФЭУ, ПБМ, ИПД, РТДС.
Также в подсистеме измеряются отклонения от нормы напряжения на путевом реле свободной / занятой РЦ, времени перевода стрелки, рабочего тока при переводе стрелки, выходного и питающего напряжения датчиков бесконтактного автопереключателя, времени срабатывания автовозврата стрелки и реле технической диагностики, напряжения питающих устройств, параметров станционной батареи, времени переключения фидеров, сопротивления изоляции цепей питания, напряжения РТДС, ИПД,
тока ФЭУ, давления в воздушной магистрали, напряжения ДСО, параметров устройств электропитания, текущего состояния панелей питания,
суточного контроля параметров устройств электропитания, расхода электроэнергии. Предусмотрена самодиагностика работы комплекса микропроцессорных средств и диагностирование средств связи локальной сети. На рис. 1.6 приведен динамический протокол прохождения отцепом
стрелочного участка. В нем показаны результаты диагностирования работы устройств управления, идентифицированы последовательность и длительность событий.
Программный продукт «Контроль и диагностирование процесса торможения – КТД», обрабатываемый БПК2, предназначен для контроля
и диагностирования устройств регулирования скоростей скатывания отцепов и технологических процессов управления замедлителями на ТП.

Рис. 1.6. Динамический протокол прохождения отцепа
по стрелочному участку
Подсистема контроля и диагностирования процесса торможения СКДТ осуществляет:
- непрерывный автоматический обмен информацией с ГАЦ-МП
по результатам контроля работы устройств на измерительном участке
(реверсивных датчиков прохода осей, РТДС, весомера, РЦ);
- автоматизированную проверку и диагностирование устройств управления скоростью отцепов на СГ (автоматический сбор, анализ и статистическую оценку информации о торможении отцепов);
- автоматический контроль состояния напольных устройств всех участков ТП (ДСС, РИСов, замедлителей, электронных регуляторов давления, РЦ), тормозных характеристик замедлителей (времени затормаживания, оттормаживания, замедления на ступенях торможения), наработки на отказ устройств управления (замедлителей) и их износа, а также предотказную диагностику;
- непрерывный автоматический контроль и протоколирование процесса перемещений вагонов и управления на участках ТП с использованием информации от датчиков;
- обеспечение эксплуатационного и оперативного персонала информацией при проведении ремонтно-восстановительных работ на замедлителях и объективной документированной информацией по текстовым, графическим и динамическим протоколам, формируемым СКДТ;
- обмен информацией с другими программными модулями.
Программный модуль АРС-МП обеспечивает расчет моделей скатывания и режимы торможения отцепов до заданной скорости выхода, реализуя его адаптивное регулирование. На основе данных КЗП ведется модель размещения и движения отцепов в динамике. Моделирование процесса скатывания отцепов по ТП, учет результатов диагностирования технического состояния замедлителей СКДТ и фактического качества торможения позволили добиться самоорганизации (адаптации) процесса регулирования скоростей выхода отцепов из ТП. Для автоматизации прицельного регулирования без парковых ТП и КЗП алгоритмы АРС-МП моделируют процессы скатывания и управления отцепами с учетом допустимых скоростей входа на пути ПФ.
Одним из достоинств АРС-МП является автоматическое формирование графических протоколов торможения в режимах «Автомат» и «Ручное торможение». В качестве примера на рис. 1.7 приведен графический протокол ручного торможения отцепа из 8 вагонов шестой весовой категории.
Здесь контроль скорости перемещения поосной модели на шинах
замедлителей РНЗ-2М позволяет оценить и рассчитать характеристики торможения.
Представленная на рис. 1.4 КСАУ-КС управляет компрессорами при производстве сжатого воздуха, непрерывно контролирует состояние компрессорного оборудования. КСАУ-КС обеспечивает обмен информацией
с подсистемами АРС-МП, ГАЦ-МП для контроля режима работы горки
и передачи контрольно-диагностической информации. Кроме этого, обеспечивается автоматическое управление компрессорами для поддержания давления в воздухосборниках в пределах 7,5 – 8,0 атм. при управлении
замедлителями, 5,4 – 6,5 атм. при длительном отсутствии роспуска и 4,7 – 6,5 атм. при обдувке стрелок.

Рис. 1.7. Графический протокол торможения
Защита (выключение) неисправного компрессора осуществляется
на основе результатов его диагностирования.
В технической структуре КСАУ СП подсистема АДК-СЦБ парков предназначена для диагностирования устройств и систем ЖАТ в парках СС; формирования диагностических, динамических и статистических протоколов на основе данных об отказах и предотказных состояниях; локализации мест нарушения нормальной работы устройств СЦБ и технического их обслуживания; увязки с устройствами ЭЦ и КДС-СС с целью мониторинга состояния этих устройств и организации поездных и маневровых передвижений в парковых зонах СС. Подсистема обеспечивает в реальном масштабе времени техническое диагностирование и мониторинг работы устройств СЦБ на всей СС и подходах к ней, что позволяет совершенствовать работу маневровых диспетчеров и руководящего персонала, осуществлять увязку с задачами АСУ верхних уровней.
Интегрирующим звеном в общей структуре КСАУ СП является КДК-СС, который предназначен для увязки подсистем горочной автоматизации, создания единой БД на станционном сервере, организации сети
общего назначения с целью автоматизации операций по формированию технологических, диагностических отчетов о работе устройств и эксплуатационного персонала. Сервер КДК-СС обеспечивает информационное взаимодействие с подсистемами СС и серверами КДК-ШЧД системы АДК-СЦБ, СТДМ и АСУ-Ш-2. Единая БД обеспечивает доступ к необходимой информации, справочным данным, протоколам технологических процессов на рабочих местах.
Выполненный анализ ГАЦ-МП позволил установить ее высокую функциональную развитость и богатые алгоритмические возможности. Можно утверждать, что в системе уже заложены функции автоматической поддержки принятия решений. Сюда относятся:
- автоматическое восстановление маршрутных заданий без ДСПГ при нерасцепах и нагонах;
- идентификация опасных ситуаций взреза стрелок при движении «снизу-вверх»;
- выявление предотказов технических средств;
- своевременное обнаружение тенденций ухудшения характеристик торможения;
- автоматическая адаптация моделей торможения и др.
Однако проблема дальнейшей интеллектуализации сортировочного процесса остается открытой. Это касается автоматической поддержки принятия решений при выборе наиболее оптимального варианта первоочередной подачи состава к роспуску из ПП, выборе пути отсева чужаков при
нагонах, непереводе стрелки, перетормаживании отцепов на ТП и др.
Не менее важной задачей, требующей автоматического перебора большого числа вариантов и принятия наиболее оптимального решения, является выбор маршрутов заезда маневровых локомотивов в подгорочном парке.
Автоматическая «помощь» ДСПГ требуется также на этапе прогнозирования опасных или технологически недопустимых ситуаций в процессе роспуска (отсутствие проходов, скатывание отцепов на пути, где
находятся вагоны с признаком ВМ или локомотив и т.д.).
Нерешенность в ГАЦ-МП перечисленных задач, требующих автоматической поддержки на этапе принятия решений, в равной степени относится к КГМ ПК и ГАЦ-АРС ГТСС, анализ которых здесь не приводится.
Зарубежный опыт автоматизации и информатизации СГ
Большой опыт эксплуатации микропроцессорных систем автоматизации СГ накоплен на зарубежных железных дорогах. Ниже приводится анализ только двух систем, которые получили широкое внедрение на различных континентах. К ним относятся: система MSR-32 (Германия)
и DDC-III-PC (США).
Подробный анализ различных зарубежных систем автоматизации СГ приводится в [12]. Здесь же дается краткая характеристика двух наиболее современных систем в контексте их интеллектуальных возможностей при реализации поставленных в предыдущем разделе задач автоматической поддержки принятия решений.
Лидер в области автоматизации СС в Германии и Европе фирма «Siemens», в активе которой такие крупные объекты, как Мюнхен-Северный и Машен в Германии, Цюрих-Лимматталь (5200 ваг./сутки)
в Швейцарии, Антверпен-Северный в Бельгии, Тампере в Финляндии, Вена-Сортировочная (6100 ваг./сутки) в Австрии и другие, создала микропроцессорную систему автоматизации MSR-32, структурная схема которой приведена на рис. 1.8.
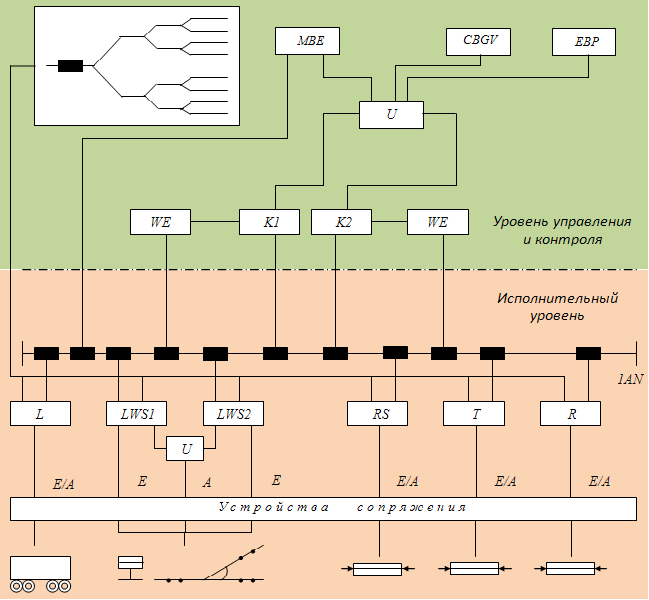
Рис. 1.8. Структурная схема системы автоматизации СГ MSR-32
Впервые данная разработка была внедрена на СГ станции Мюнхен-Северный на базе 32-разрядных микро-ЭВМ (MSR-32), объединенных
в локальную сеть LAN. Система MSR-32 состоит из элементов открытых блочных микропроцессорных систем OSM (Offene Siemens Multibus
II-Architektur – открытая архитектура на базе магистрали Multibus II компании Siemens) и AMS (Advanced Microcomputer System – прогрессивная микропроцессорная система).
В состав системы MSR-32 входят следующие основные устройства:
L – дистанционное управление горочным локомотивом; LWS – управление маршрутами скатывания отцепов; Т – управление вагонозамедлителями средней ТП; U – коммутатор; BS – управление вагонозамедлителями верхней ТП; К1,К2 – системы связи; LAN – локальная сеть;
WE – устройство технического обслуживания; MBE – система индикации и ввода команд; CBGV – централизованная система управления грузовыми перевозками; EBP – АРМ оператора; А – выходные сигналы; E – входные сигналы.
Требования к подсистеме управления длиной пробега отцепов усилены в связи с возрастанием доли опасных (химических) грузов, проходящих через горку. Они реализованы с помощью новейших технологий
динамического контроля режима движения отцепов. В основе последних лежит повышение точности прогнозирования движения отцепов при
сокращении интервалов между ними, ранняя диагностика и предотвращение нагонов, запусков и боковых ударов. УВК имеет горячее резервирование (LWS1 и LWS2) с коммутацией управляющих воздействий и независимым вводом контролируемых параметров.
Информация об отцепе формируется в процессе его скатывания:
о весе – с датчика, расположенного перед стрелочной зоной; о длине – при проходе радара; о правильности расцепа – пятилучевым световым шлагбаумом, расположенным там же.
Эта информация уточняется и дополняется на датчиках спускной части горки для прогнозирования движения отцепов, в том числе – при
неисправности рельсовых контактов. Во время роспуска в случае угрозы боковых ударов стрелки автоматически переводятся в охранное положение, возможна также остановка горочного локомотива.
Принципы управления скоростью скатывания отцепов заключаются в проходе бегунами распределительной зоны горки с одинаковыми средними скоростями за счет ее регулирования на верхней и нижней ТП. Причем, перед нижней ТП определяются ходовые свойства отцепов на трехточечных измерительных участках. Скорость выхода из нижней ТП определяется из условия входа каждого отцепа на подгорочный путь со средней скоростью 4,0 м/с с учетом сопротивления движения от кривых и стрелок.
Замедлители парковых ТП уменьшают скорость отцепов до 1,5 м/с,
а продвигающие устройства (осаживатели) обеспечивают дальнейшее движение отцепов по подгорочному пути до соединения с уже стоящими вагонами.
На II ТП применены сдвоенные замедлители с резиновым рабочим органом, рассчитанные на вытормаживание по последней тележке с минимальным числом воздействий на отцеп. Это обеспечивает экономичность
и бесшумность работы с учетом скорейшего проследования отцепами распределительной зоны горки. Применение устройств идентификации локомотивов впервые позволило добиться точного определения местонахождения горочных (надвигающих) локомотивов в ПП с индикацией его на мониторе управления горкой. Скорость радиоуправляемых локомотивов
определяется заранее для каждого отцепа, исходя из условий их разделения.
В системе MSR-32, наряду с традиционным пультом управления СГ, применяются интеллектуальные пульты управления на базе персональных ЭВМ. Предусмотрено 100 %-ное резервирование за счет использования сдвоенной компьютерной системы фирмы Siemens на базе 32-х разрядных микро-ЭВМ. Планируется развитие АРМов, где, кроме горочного пульта
и терминалов, должны быть установлены дополнительные мониторы,
отображающие нарушения хода роспуска с непрерывным контролем
возникающих негативных ситуаций.
Альтернативой MSR-32 для СС большой и средней мощности является американская система DDC III [12].
Основные показатели работы системы: скорость соударения отцепов в ПФ не превышает 1,5 м/с в 95 % случаев при высокой производительности станции, что позволяет системе DDC III успешно конкурировать
с разработками фирмы Siemens.
Система DDC III установлена более чем на половине СС в США,
Канаде, Китае, Нидерландах и Италии.
Структура системы (рис. 1. 9) содержит полностью резервированную микропроцессорную систему управления с двумя управляющими ЭВМ, работающими в режиме «горячего резерва», двумя комплектами устройств управления вводом/выводом, электропитания и модульным структурированным ПО для управления и контроля всеми функциями системы.
Имеются два исполнения ЭВМ с одинаковыми функциями и производительностью:
- DDС III-PC: IBM-совместимая система на основе 32-разрядных процессоров;
- DDС III-Alpha: система на основе 64-разрядных процессоров Alpha.
В дальнейшем описании за основу принята IBM PC-совместимая система. Обе ЭВМ соединены с блоком переключения на резерв при отказе (Failver Unit). Основой этой сдвоенной системы ЭВМ являются процессоры типа Pentium новейшего поколения. Рабочие места операторов ПЭВМ объединены в сеть вместе с ЭВМ.
Обе центральные ЭВМ соединены через резервированную локальную сеть (Local Area Network – LAN) c устройствами управления, вводом/выводом, расположенными в шкафах коммутации, терминалами обслуживающего персонала. В каждом шкафу коммутации находится резервированный высокопроизводительный комплекс из шести пар ЭВМ, включающих центральный процессор, работающий в режиме реального времени, и процессор, находящийся в горячем резерве. Оба они соединены
с блоком переключения на резерв при отказе. Каждый контроллер ввода/вывода содержит одноплатную ЭВМ с последовательным и параллельным сопряжением, а также релейные выходы с оптронной развязкой.

Рис. 1.9. Техническая структура микропроцессорной системы
автоматизации DDC III
Вся логика и интеллектуальные узлы управления размещены централизованно в составе аппаратуры, находящейся в аппаратной ЭВМ. Связь между процессорами и периферийными устройствами осуществляется при помощи магистрали STD-bus стандарта IEEE-961 для систем на базе ПЭВМ. Преимущества магистрали STD-bus по сравнению с другими типами магистралей промышленного применения состоят в простоте сопряжения и малых габаритах плат.
ПО системы DDC III позволяет закрепить конкретные функции за его отдельными частями благодаря модульной структуре. При этом выполнение конкретных задач осуществляется независимыми друг от друга программными модулями.
Система DDC III обеспечивает слежение за каждым спускаемым объектом в течение всего его перемещения – от вершины горки до конца ПФ. Система компенсирует влияние контролируемых и случайных событий, таких, как ветер, температура, недоход вагонов, нарушение действий стрелок и замедлителей, определяет расстояние между отцепами, скорость их движения, автоматически определяет длину необходимого пробега по подгорочным путям и задает необходимое тормозное усилие замедлителям. Индикация состояния осуществляется в реальном времени. Информация о потенциально опасных ситуациях выдается операторам на мониторы или в виде акустического сигнала. В системе обеспечивается индикация большого количества информации о ходе технологического роспуска, плане работы и ситуации на путях с возможностью вызова на экран необходимых данных и направления их на печать.
Анализ зарубежных систем автоматизации СГ позволил выявить наметившуюся тенденцию их интеллектуализации. В системе MSR-32 на базе персональных компьютеров уже используются «интеллектуальные пульты». Вся «…логика и интеллектуальные узлы» системы DDC III размещены централизованно в составе аппаратуры, находящейся в аппаратной ЭВМ...» Это подтверждает актуальность решения поставленных выше задач и необходимость дальнейшего развития отечественных систем
и комплексов автоматизации СГ и СС в целом на основе внедрения ПИ, современных информационных и интеллектуальных технологий.








