 2017-11-30
2017-11-30 2339
2339Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
«Омский государственный технический университет»
А.В. Михайлов, М.Г. Родионов
ПРОЕКТИРОВАНИЕ ЦИФРОВЫХ
ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВ
Учебное пособие
«Рекомендовано УМО по образованию
в области приборостроения и оптотехники в качестве учебного пособия для студентов высших учебных заведений, обучающихся по направлению подготовки 200100 – Приборостроение и специальности 200106 – Информационно-измерительная техника и технологии».
Омск 2007
УДК 621.317.7 (075)
ББК 34.9я73
М 69
Рецензенты:
А.И. Калачев, к.т.н., проректор по учебной работе Сибирского
института бизнеса и информационных технологий;
И.В. Леончиков, главный специалист по "КИП и Автоматика "ОАО Омский опытно-промышленный завод "Нефтехимавтоматика"
Михайлов А.В.
М 69 Проектирование цифровых измерительных устройств: учеб. пособие / А.В. Михайлов, М.Г. Родионов. – Омск:
Изд-во ОмГТУ, 2007. – 184 с.
ISBN 5-8149-0428-3
Приведены основные принципы проектирования цифровых измерительных устройств различного назначения. Даны практические рекомендации по их проектированию.
Для студентов, обучающихся по направлению 653700 "Приборостроение", дневной, вечерней и заочной форм обучения, а также студентов других специальностей, изучающих дисциплину "Цифровые измерительные устройства".
Печатается по решению редакционно-издательского совета
Омского государственного технического университета
УДК 621.317.7 (075)
ББК 34.9я73
ã Авторы, 2007
ã Омский государственный
ISBN 5-8149-0428-3 технический университет, 2007
ВВЕДЕНИЕ
За последние сорок лет в создании новых электронных цифровых приборов и систем различного назначения наблюдалось стремительное развитие, которое привело к значительным изменениям во многих отраслях науки и техники. В настоящее время невозможно найти какую-либо отрасль промышленности, в которой не использовались бы цифровые измерительные устройства или автоматика и вычислительная техника. Это и радиоэлектронные системы, предназначенные для решения сложных комплексных задач, и изделия, имеющие особые эксплуатационные назначения и выполняющие отдельные функции, и изделия вычислительной техники, встроенные в приборы и системы или подключаемые к ним.
В развитии радиоэлектронных приборов и систем на протяжении многих лет остается стабильным только одно – непрерывное совершенствование эксплуатационных показателей и показателей функционального назначения.
Разработка и эффективное применение радиоэлектронной аппаратуры невозможны без знания основных принципов проектирования цифровых измерительных устройств различного назначения. Поэтому изучению дисциплины "Цифровые измерительные устройства" обычно уделяется повышенное внимание.
Дисциплина "Цифровые измерительные устройства", введенная в соответствии с государственными образовательными стандартами по направлению 653700 "Приборостроение", призвана сформировать у студентов понимание особенностей комплексного проектирования цифровых измерительных устройств с учетом целого ряда показателей назначения и эксплуатационных характеристик этих устройств.
Цифровым измерительным устройством (ЦИУ) называется электронное устройство, автоматически вырабатывающее дискретные сигналы измерительной информации, показания которого представлены в цифровой форме.
ЦИУ – это устройство, в котором измеряемая величина автоматически в результате квантования и цифрового кодирования представляется кодовым сигналом, выражающим значение измеряемой величины.
Общий отличительный признак ЦИУ заключается в том, что преобразование непрерывной величины в дискретную осуществляется автоматически.
Непрерывной величиной называется сигнал, представленный бесконечным множеством значений на любом конечном промежутке времени.
Дискретной величиной называется сигнал, представленный конечным набором разрешенных уровней, называемых квантами, на конечном промежутке времени.
Квантованием называется замена непрерывной величины, представленной бесконечным множеством значений на любом конечном интервале времени, ограниченным набором разрешенных уровней, называемых квантами, на данном интервале времени.
Дискретизацией называется замена непрерывной величины выборками ее значений через определенные интервалы времени.
На рис. 1.1 представлена общая структурная схема аналого-цифрового преобразователя, а на рис. 1.2 – общая структура ЦИУ.

Рис. 1.1. Общая структурная схема
аналого-цифрового преобразователя
На рисунке обозначено: КвУ – квантующее устройство, выполняющее операцию квантования; КУ – кодирующее устройство, совместно с квантованием выполняющее операцию дискретизации;
УУ – устройство управления (для автоматизации процесса преобразования)
По способу квантования различают следующие виды ЦИУ:
– ЦИУ с квантованием по уровню;
– ЦИУ с квантованием по времени;
– ЦИУ пространственного кодирования.
Отметим, что при любом способе квантования возможна реализация как ЦИУ непрерывного действия, так и ЦИУ циклического преобразования.

Рис. 1.2. Общая структура ЦИУ
На рисунке обозначено: АП – аналоговый преобразователь, преобразующий физическую величину Х в электрический сигнал; АЦП – аналого-цифровой преобразователь; ЦОУ – цифровое отсчетное устройство; РУ – регистрирующее устройство; ЭВМ – электронно-вычислительная машина
Контрольные вопросы
1. Дайте определение ЦИУ.
2. Дайте определение дискретизации.
3. Какая величина называется непрерывной?
4. Какая величина называется дискретной?
5. Что понимается под термином "квантование"?
6. Проведите классификацию ЦИУ по способу квантования.
7. В чем заключается общий отличительный признак ЦИУ?
2. ЦИУ С КВАНТОВАНИЕМ ПО УРОВНЮ
ЦИУ с квантованием по уровню в общем случае представляют собой устройства на основе АЦП интегрирующего типа (времяимпульсного и частотно-импульсного), поразрядного уравновешивания и параллельного преобразования.
В цифровых вольтметрах используют следующие виды АЦП время-импульсного и частотно-импульсного преобразования: однотактного интегрирования, двухтактного интегрирования и АЦП сигма-дельта преобразования.
2.1. Вольтметр на основе времяимпульсного АЦП
однотактного интегрирования
Однотактный вольтметр относится к приборам прямого преобразования, выполняемого в 2 этапа.
1.
 |
Напряжение UX преобразуется в интервал времени tX:
где U0 – опорное напряжение с полярностью, противоположной UX; t – постоянная времени интегратора.
2. Интервал времени tX преобразуется в цифровой код NX:
 |
Таким образом, общее уравнение преобразования прибора:
 |
где f0 – частота ГОЧ.
Оба этапа происходят за один такт.
Один из вариантов функциональной схемы такого вольтметра представлен на рис. 2.1.
Работа схемы происходит следующим образом. В начальный момент времени, при включении прибора, БУ устанавливает сигналы "сброс" = 1 и "запрет" = 0, удерживая эти сигналы в течение времени, которое впоследствии будет использоваться как время индикации. По истечении этого времени указанные сигналы снимаются.
При этом на выходе интегратора DA1 напряжение равно 0 B. На инвертирующем входе компаратора DA3 – положительное напряжение Ux, за счет чего на выходе DA3 будет "1". Поскольку "запрет" = 1, импульсы с ГОЧ частотой fo проходят на счетчик СИ. Под действием опорного напряжения Uo на выходе интегратора формируется линейно нарастающее напряжение. Как только оно сравняется с Ux, на выходе DA3 установится "0" и селектор DD1 закроется для прохождения сигнала fo.

Рис. 2.1. Функциональная схема вольтметра
однотактного интегрирования
Код Nx на выходе счетчика по срезу сигнала на выходе DA3 (сигнал "запись") перепишется в регистр Рг. С выхода Рг код Nx поступает на ЦОУ и в виде числа отображается на его индикаторах. Это число и есть результат измерения.
Кроме того, по срезу сигнала с выхода DA3, БУ подаст сигнал "сброс" на ключ DA2, разряжая конденсатор С. Этот же сигнал подается на СИ, сбрасывая его. На селектор DD1 будет подан сигнал "запрет" = 0.
Для исключения дребезга компаратора в момент равенства напряжений, в его схему включения вводится небольшой гистерезис с небольшим сопротивлением в цепи ОС.
БУ можно выполнить на одной микросхеме одновибратора, например, АГ3 ТТЛ серии так, как это показано на рис. 2.2. Здесь RC-цепочка R2, C1 обеспечивает задержку распространения сигнала с выхода DA1 на время, требуемое для записи выходного кода СИ в Рг по заднему фронту импульса tX.

Рис. 2.2. Принципиальная схема БУ в однотактном вольтметре
Длительность выходного импульса одновибратора АГ3 определяется формулой

Погрешности вольтметра однотактного интегрирования
Мультипликативные погрешности
1. Погрешность от нестабильности опорного напряжения и его неточности (чаще всего вносит наибольший вклад в общую погрешность).
2. Погрешность от допуска на номинал резистора и от его ТКС:

3. Погрешность от допуска на номинал конденсатора и от его ТКС:

Эти три погрешности можно устранить двумя способами, сведя их только к температурным составляющим:
а) регулировкой сопротивления резистора R в интеграторе;
б) регулировкой опорного напряжения U0.
4. Погрешность от нестабильности частоты ГОЧ.
5. Погрешность линейности интегратора

где kо – собственный коэффициент усиления ОУ.
Аддитивные погрешности

где N0 – число ступеней квантования АЦП, определяемое его разрядностью n (N0 = 2n).
2. Погрешность от наличия ЭДС смещения нуля интегратора и компаратора.
В идеальном случае длительность импульса на выходе компаратора

При наличии смещений нуля еои и еок получаем:

Следовательно, реально длительность импульса на выходе компаратора

Отсюда погрешность формирования интервала tX:

 Подставляя в последнюю формулу выражения для tXи и tXp, получим
Подставляя в последнюю формулу выражения для tXи и tXp, получим

Если ОУ в интеграторе имеет входной ток, сопоставимый с током в цепи обратной связи интегратора, то в составляющую еои следует добавить еще и произведение Iвх ∙ R.
Основные достоинства этой схемы:
1) сравнительно небольшое количество элементов, а следовательно, ее низкая стоимость;
2) возможность получения высокого быстродействия, определяемого из

Следовательно:

Основные недостатки данной схемы:
1) большое число источников погрешностей и, следовательно, жесткие требования к точности элементной базы, а также некоторая сложность в настройке схемы;
2) схема не обеспечивает помехозащищенности.
2.2. Времяимпульсный вольтметр на основе АЦП
двухтактного интегрирования
Способ двухтактного интегрирования методически лишен недостатков, присущих способу однотактного интегрирования. Принцип действия таких АЦП заключается в следующем. В первом такте, за известный промежуток времени t0, интегрируется неизвестное входное напряжение UX. Во втором такте производится считывание накопленного интеграла с помощью образцового напряжения U0. Длительность tХ второго такта прямо пропорциональна входному напряжению. В общем виде уравнение, описывающее изменение сигнала на выходе интегратора, имеет вид

где t – постоянная времени интегратора.
Получим уравнение преобразования такого вольтметра. Для напряжения на выходе интегратора за цикл преобразования можно записать:

После взятия интеграла получаем

где Uинт1 – напряжение на выходе интегратора в конце 1-го такта:

Подставляя полученное выражение в формулу для tx, получаем

Интервал времени t0 формируется путем деления частоты образцового генератора счетчиком импульсов. Таким образом:

где N0 – емкость счетчика импульсов; fo – частота образцового генератора.
Тогда

Отсюда результат измерения:

Это и есть уравнение преобразования двухтактного вольтметра.
Результат измерения, как видно из уравнения преобразования, не зависит ни от постоянной времени интегратора, ни от частоты образцового генератора.
Погрешности вольтметра двухтактного интегрирования
1. Погрешности от неточности dU0 и нестабильности dTKU0 напряжения U0 (мультипликативные):


где DU0 – максимальное по модулю отклонение опорного напряжения от номинального значения; TKU0 – абсолютное значение отклонения опорного напряжения от номинального значения при изменении температуры окружающей среды на 1оС; DТ = ± 5 оС – диапазон нормальных температур.
2. Погрешность квантования (аддитивная):

3. Погрешности от ЭДС е0 смещения нуля dе0 и дрейфа ТКе0 этой ЭДС dТКе0 в ОУ интегратора (аддитивные):
 ;.
;.  .
.
4. Погрешность от входных токов ОУ интегратора (аддитивная):
 ,
,
где e(iВХ) – ЭДС смещения нуля на входе ОУ интегратора, вызванная наличием iВХ.
5. Погрешность линейности интегратора (мультипликативная):

где k0 – собственный коэффициент усиления ОУ интегратора; fCP – частота среза RC цепи обратной связи; Um – размах напряжения на выходе интегратора;
V – скорость нарастания выходного напряжения ОУ интегратора.
6. Погрешность от неравенства между собой сопротивления RK каналов ключей в замкнутом состоянии (мультипликативная):

где DRк – максимальная разность сопротивлений каналов ключей, через которые напряжения UX и U0 подаются на вход интегратора; RИНТ – сопротивление резистора, подключенного к И-входу ОУ интегратора.
На рис. 2.3 приведен один из вариантов схемной реализации вольтметра двухтактного интегрирования.

Рис. 2.3. Функциональная схема вольтметра двухтактного интегрирования
Работа схемы происходит следующим образом. По сигналу с выхода генератора цикла ГЦ (короткий импульс низкого уровня) триггер DD2 устанавливается в "1" (сигнал "1 такт") и замыкается ключ DA3.1, подключая к входу интегратора измеряемое напряжение Ux. Напряжение UИНТ на выходе интегратора начинает линейно убывать. Как только UИНТ достигнет нуля, компаратор DA2 установится в "1" и откроет селектор DD1. Импульсы с выхода ГОЧ с частотой f0 будут поступать на счетчик СИ. Как только СИ переполнится, на его выходе возникает сигнал "переполнение". Передний фронт этого сигнала сбросит триггер DD2, и на его инверсном выходе установится "1" (сигнал "2 такт"). При этом ключ DA3.1 разомкнется, а DA3.2 замкнется, и напряжение на выходе интегратора начнет линейно возрастать под действием U0. Тем самым начнется отсчет и преобразование в цифровой двоично-десятичный код NX интервала времени tХ. Как только на выходе интегратора напряжение сравняется с нулем, на выходе компаратора DA2 установится "0", и селектор DD1 закроется. По заднему фронту импульса на выходе компаратора код NX запишется в регистр Рг. С выхода Рг этот код поступит на дешифратор ЦОУ и в виде числа отобразится на его индикаторах. По следующему импульсу "старт", с выхода ГЦ описанный выше процесс повторится.
Временные диаграммы работы данной схемы приведены на рис. 2.4.

Рис. 2.4. Временные диаграммы работы схемы вольтметра
двухтактного интегрирования
При практической реализации такой схемы постоянная времени интегратора выбирается из условия t = R.C ³ tХmax. Чаще всего t = 2. tХmax.
Кроме того, чаще всего принимается tХmax = t0.
Выходная частота ГЦ выбирается так, чтобы пользователь успел снять показания прибора после преобразования, хотя в схеме, приведенной на рис. 2.3, благодаря наличию Рг это не требуется. Важно, чтобы значение периода следования импульсов с выхода ГЦ удовлетворяло условию: Тгц > tХmax + t0.
Существенным достоинством двухтактного преобразования является то, что входной сигнал UX интегрируется за известный промежуток времени t0, а следовательно, помеха, которая может в нем содержаться, будет интегрироваться за это же время. Если t0 задать так, что на этом интервале времени будет укладываться целое число периодов помехи, то интеграл от сигнала помехи будет равен 0. Это свойство вольтметров двухтактного интегрирования называется помехоподавлением и оценивается через коэффициент помехоподавления:

где Uпm – амплитуда помехи; Dп – абсолютная погрешность измерения, вызванная наличием помехи.
Графическая зависимость коэффициента помехоподавления от частоты помехи представлена на рис. 2.5.

Рис. 2.5. Зависимость kП от частоты помехи
Достоинства вольтметров двухтактного интегрирования:
1) сравнительно небольшое количество источников погрешности (ОУ интегратора, источник опорного напряжения и погрешность квантования);
2) потенциальная помехозащищенность при условии долговременной стабильности частоты ГОЧ.
Недостатки:
1) низкое быстродействие;
2) в таких приборах tИЗМ не может быть меньше 40 мс, так как
 мс.
мс.
В заключение рассмотрения вольтметров интегрирующего типа отметим, что метод 2-тактного интегрирования используется в большинстве серийно выпускаемых вольтметров и интегрирующих АЦП. В этих приборах зачастую вводятся еще несколько служебных тактов. Эти такты используются как во время преобразования (для уменьшения погрешности линейности интегратора), так и по окончании преобразования (для автоматической коррекции дрейфа ЭДС смещения нуля интегратора).
Вольтметр на основе АЦП S-d преобразования
Вольтметр на основе АЦП S-d преобразования относится к приборам частотно-импульсного преобразования. Один из принципов, заложенных в таких преобразователях, позволяющий уменьшить погрешность, вносимую шумами, а следовательно, увеличить разрешающую способность, это усреднение результатов измерения на большом интервале времени. Принцип S-d преобразования заключается в нейтрализации тока, поступающего на интегратор от внешнего источника сигнала, некоторым образцовым током, который вырабатывается источником тока схемы.
Один из вариантов функциональной схемы такого вольтметра приводится на рис. 2.6.
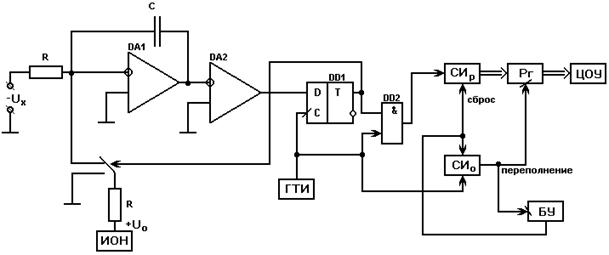
Рис. 2.6. Функциональная схема вольтметра на основе АЦП
S-d преобразования
Работа схемы осуществляется следующим образом. Под действием напряжения -UХ напряжение на выходе интегратора линейно увеличивается. При переходе его через нуль на выходе компаратора DA2 устанавливается "1". По приходу первого импульса с выхода ГТИ, на прямом выходе триггера DD1 тоже установится "1". Эта "1" открывает ключ DD2, и импульсы выхода ГТИ поступают на рабочий счетчик импульсов (СИР). Логическая единица на прямом выходе триггера переключит ключ так, что опорное напряжение U0 через резистор R создаст ток, компенсирующий действие тока, который создается источником сигнала -UХ. То есть создастся ток I0 = U0/R, предельное значение которого равно UХmax/R.
В результате за цикл преобразования среднее значение тока через конденсатор будет равно нулю. Длительность цикла преобразования tЦ = N0/fГТИ, где N0 – емкость опорного счетчика СИО. Процесс преобразования заканчивается по сигналу "переполнение" на выходе СИО.
В результате преобразования в работающем счетчике накапливается код, прямо пропорциональный числу пересечений напряжения на выходе интегратора нулевого значения.
Задний фронт сигнала "переполнение" производит запись кода NX с выхода СИР в регистр Рг и вызывает появление на выходе БУ сигнала "сброс", обнуляющего СИР и СИО. Минимальная длительность сигнала "сброс" определяется временем, необходимым для надежного обнуления СИР и СИО (как правило, достаточно десятых долей мкс).
Уравнение преобразования такого вольтметра:

В этом приборе значение tЦ = N0/fГТИ, как и в двухтактном вольтметре, можно подобрать так, чтобы в нем укладывалось целое число периодов ожидаемой помехи. Но данный прибор позволяет проводить измерения за время tЦ, много меньшее периода помехи, однако чаще всего АЦП, входящий в состав вольтметра, содержит цифровой фильтр.
Особенности АЦП S-d преобразования с цифровым фильтром
Основные узлы такого АЦП – это сигма-дельта модулятор и цифровой фильтр. Схема n-разрядного сигма-дельта модулятора первого порядка приведена на рис. 2.7. Работа этой схемы основана на вычитании из входного сигнала Uвх(t) величины сигнала на выходе ЦАП, полученной на предыдущем такте работы схемы. Полученная разность интегрируется, а затем преобразуется в код параллельным АЦП невысокой разрядности. Последовательность кодов поступает на цифровой фильтр нижних частот.

Рис. 2.7. Структурная схема сигма-дельта модулятора
Порядок модулятора определяется числом интеграторов и сумматоров в его схеме. Сигма-дельта модуляторы i-того порядка содержат i сумматоров и интеграторов и обеспечивают большее соотношение сигнал/шум при той же частоте отсчетов, чем модуляторы первого порядка. Примерами сигма-дельта модуляторов высокого порядка являются одноканальный модулятор AD7720 седьмого порядка и двухканальный ADMOD79 пятого порядка.
Наиболее широко в составе ИМС применяются однобитные сигма-дельта модуляторы, в которых в качестве АЦП используется компаратор, а в качестве ЦАП – аналоговый коммутатор (рис. 2.8).

Рис. 2.8. Структурная схема сигма-дельта АЦП
При использовании двоичного счетчика в качестве преобразователя потока битов, поступающих с выхода компаратора, необходимо выделять фиксированный цикл преобразования, длительность которого равна Kсч . fтакт. После его окончания должно производиться считывание результата, например, с помощью регистра-защелки и обнуление счетчика. В этом случае с точки зрения помехоподавляющих свойств сигма-дельта АЦП близки к АЦП 2-тактного интегрирования. Поэтому более эффективно применение в сигма-дельта АЦП цифровых фильтров с конечной длительностью переходных процессов.
В сигма-дельта АЦП обычно применяются цифровые фильтры с амплитудно-частотной характеристикой (АЧХ) вида [3×(sinx/x)]. Передаточная функция такого фильтра в z-области определяется выражением

где М – целое число, которое задается программно и равно отношению тактовой частоты модулятора к частоте отсчетов фильтра. (Частота отсчетов – это частота, с которой обновляются данные). Например, для АЦП AD7714 это число может принимать значения от 19 до 4000. В частотной области модуль передаточной функции фильтра

Сравнение АЧХ цифрового фильтра, построенной согласно последнему выражению, с АЧХ коэффициента подавления помех АЦП двухтактного интегрирования показывает значительно лучшие помехоподавляющие свойства сигма-дельта АЦП.
В то же время применение цифрового фильтра нижних частот в составе сигма-дельта АЦП вместо счетчика вызывает переходные процессы при изменении входного напряжения. Время установления цифровых фильтров с конечной длительностью переходных процессов, как следует из их названия, конечно и составляет для фильтра вида [3 × (sinx/x)] четыре периода частоты отсчетов, а при начальном обнулении фильтра – три периода. Это снижает быстродействие систем сбора данных на основе сигма-дельта АЦП. Поэтому выпускаются ИМС AD7730 и AD7731, оснащенные сложным цифровым фильтром, обеспечивающие переключение каналов с временем установления 1 мс при сохранении эффективной разрядности не ниже 13 бит (так называемый Fast-Step режим). Обычно цифровой фильтр изготавливается на том же кристалле, что и модулятор, но иногда они выпускаются в виде двух отдельных ИМС (например, AD1555 – модулятор четвертого порядка и AD1556 – цифровой фильтр).
Сравнение сигма-дельта АЦП с АЦП двухтактного интегрирования показывает значительные преимущества первых. Прежде всего, линейность характеристики преобразования сигма-дельта АЦП выше, чем у АЦП 2-тактного интегрирования равной стоимости. Это объясняется тем, что интегратор сигма-дельта АЦП работает в значительно более узком динамическом диапазоне и нелинейность переходной характеристики усилителя, на котором построен интегратор, сказывается значительно меньше. Емкость конденсатора интегратора сигма-дельта АЦП значительно меньше (десятки пФ), так что этот конденсатор может быть изготовлен прямо на кристалле ИМС. Как следствие, сигма-дельта АЦП практически не имеет внешних элементов, что существенно сокращает площадь, занимаемую им на плате, и снижает уровень шумов. В результате, например, 24-разрядный сигма-дельта АЦП AD7714 изготавливается в виде однокристальной ИМС в 24-выводном корпусе, потребляет мощность 3 мВт и стоит примерно 14 долларов США, а 18-разрядный АЦП 8-тактного интегрирования HI-7159 потребляет 75 мВт и стоит около 30 долларов.
К тому же сигма-дельта АЦП начинает давать правильный результат через 3-4 отсчета после скачкообразного изменения входного сигнала, что при величине первой частоты режекции, равной 50 Гц, и 20-разрядном разрешении составляет 60-80 мс, а минимальное время преобразования АЦП HI-7159 для 18-разрядного разрешения и той же частоты режекции составляет 140 мс. В настоящее время ряд ведущих по аналого-цифровым ИМС фирм, например Analog Devices и Burr-Brown, прекратили производство АЦП многотактного интегрирования и полностью перешли в область аналого-цифрового преобразования высокого разрешения с использованием сигма-дельта АЦП.
Сигма-дельта АЦП высокого разрешения имеют развитую цифровую часть, зачастую включающую микроконтроллер. Это позволяет реализовать режимы автоматической установки нуля и самокалибровки полной шкалы, хранить калибровочные коэффициенты и передавать их по запросу внешнего процессора.
2.4. Вольтметр частотно-импульсного
преобразования с ПНЧ
Свойство помехозащищенности легко обеспечить, используя преобразование напряжения в частоту, а затем измерить эту частоту с помощью частотомера средних значений за интервал времени, кратный предполагаемому периоду помехи, например, за 20 мс.
Обобщенная структура вольтметра будет выглядеть так, как это показано на рис. 2.9.

Рис. 2.9. Обобщенная структурная схема вольтметра
частотно-импульсного преобразования с ПНЧ
Работа схемы осуществляется следующим образом. Измеряемое напряжение поступает на вход преобразователя напряжение – частота (ПНЧ), на выходе которого будет присутствовать последовательность прямоугольных импульсов определенных для данной схемы логических уровней, частота FX следования которых описывается уравнением
 ,
,
где КПНЧ – коэффициент (крутизна) преобразования ПНЧ.
Частота FX с помощью схемы преобразователя частота – код (ПЧК) преобразуется в цифровой код NX за время преобразования Т0, формируемое в схеме ПЧК, т.е.
 .
.
Уравнение преобразования рассматриваемого вольтметра будет иметь вид
 .
.
Цифровой код NX поступает на ЦОУ, в результате чего на его индикаторах отображается число, соответствующее измеряемому напряжению NX.
Как видно из уравнения преобразования, погрешность измерения представляет собой сумму погрешностей ПНЧ и ПЧК.
Процесс измерения среднего значения частоты и присущие ему погрешности будут подробно описаны в п. 3.1.2, а схемотехника и особенности различных типов ПНЧ рассмотрены в [2].
Зависимость коэффициента помехоподавления от частоты помехи полностью соответствует графику, представленному на рис. 2.5.
Разновидности ПНЧ, используемые в ЦИУ
Преобразователи напряжение – частота (ПНЧ) служат средством преобразования электрических сигналов для различных приборов и систем. Они обеспечивают высокую помехозащищенность и чувствительность приборов. ПНЧ применяются при решении задач построения интегрирующих АЦП, измерении усредненных параметров сигналов, а также при решении задач генерации и модуляции частоты.
В приборостроении наибольшее распространение получили интегрирующие ПНЧ, обладающие следующими достоинствами:
а) хорошей точностью при минимальном числе необходимых прецизионных компонентов (у ПНЧ на дискретных компонентах достигается линейность от 0,1 до 0,001%, в интегральных микросхемах – до 0,01%);
б) высокой помехоустойчивостью;
в) малой чувствительностью к изменениям питающего напряжения;
г) отсутствием дифференциальной нелинейности.
ПНЧ преобразуют входное напряжение в частоту выходных импульсов, которые могут передаваться на большие расстояния без искажения информационного параметра – частоты.
Интегрирующие ПНЧ можно разделить на три основных группы:
1) с заданной длительностью одного такта;
2) с заданной амплитудой напряжения на выходе интегратора;
3) с заданным интегралом непрямоугольного компенсирующего импульса.








