 2014-01-31
2014-01-31 827
827Строится по ранее изложенным принципам графического кинематического исследования механизмов (рис.12.12).
Вектор скорости точки А2, принадлежащей толкателю, определяется из векторного уравнения:  ,
,
где  - вектор скорости точки А1, принадлежащей кулачку,
- вектор скорости точки А1, принадлежащей кулачку,  ,
,  ;
;
 - вектор относительной скорости, ||τ-τ;
- вектор относительной скорости, ||τ-τ;
 - вектор скорости точки А2 направлен параллельно линии движения толкателя.
- вектор скорости точки А2 направлен параллельно линии движения толкателя.
Из полюса pV в масштабе μυ проводим вектор . Из конца этого вектора проводим направление вектора , а из полюса pV - направление вектора . При пересечение этих направлений получаем треугольник, из которого определяем искомую скорость .
Определение угла давления δ
Покажем схему механизма и план скоростей (рис.12.12).
Дополнительные построения состоят в следующем. Через ось вращения кулачка 0 проведем линию, перпендикулярную направлению движения толкателя, до пересечения с нормалью n-n в точке В.
Полученный треугольник АОВ и план скоростей pυab подобны. Следовательно, 

 . (12.1)
. (12.1)
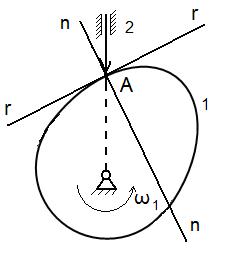
Рис.12.12
Из (12.1) следует:
 , где
, где  (12.2)
(12.2)
Из точки А отложим отрезок y в направлении, перпендикулярном направлению движения толкателя (влево). В ту сторону, куда окажется направленным вектор , если повернуть его на 90° по направлению вращения кулачка. Конец отрезка (точку k) соединим с осью вращения кулачка 0.
Как видно из (рис.13.12) угол между 0k и направлением движения толкателя - угол давления δ.
Таким образом, для определения угла давления δ не нужно знать профиль кулачка. Достаточно вычислить у по формуле (13.2) и, воспользовавшись рассмотренной методикой, графически найти угол  в любом положении толкателя.
в любом положении толкателя.








