 2020-01-14
2020-01-14 184
184
Для численного интегрирования систем дифференциальных уравнений полученных в пункте 2 данной работы использовали метод Кутта-Мерсона. Данный метод применяется при анализе цепей с вентильными элементами, когда вентильные элементы рассматриваются как идеальные, а исследуемая электромеханическая система содержит такие элементы.
Нижеприведенная программа рассчитывает ток, магнитную индукцию, высоту груза над опорой и скорости ее перемещения. Также данная программа строит графики зависимостей этих величин от времени. При запуске программы ЭВМ предлагает пользователю выбрать рассчитываемую величину и указать диапазон значений в пределах которых будет изменяться выбранная величина. По окончанию работы программа выводит график зависимости выбранной величины от времени. Программу следует запускать столько раз, сколько зависимостей требуется получить.
Графики тока, индукции, скорости и высоты в зависимости от времени приведены на рис. 4.1.- 4.4. Также с помощью данной программы построили графики зависимости скорости в момент удара об опору от Н и Хо рис.4.5. и 4.6. и определили допустимых значений Н и Хо на уровне 1/4V. Получили диапазоны: по Н – от 18,2 до 22,4 мм; по Хо – от 13,2 до 17,7 мм.
|
|
|
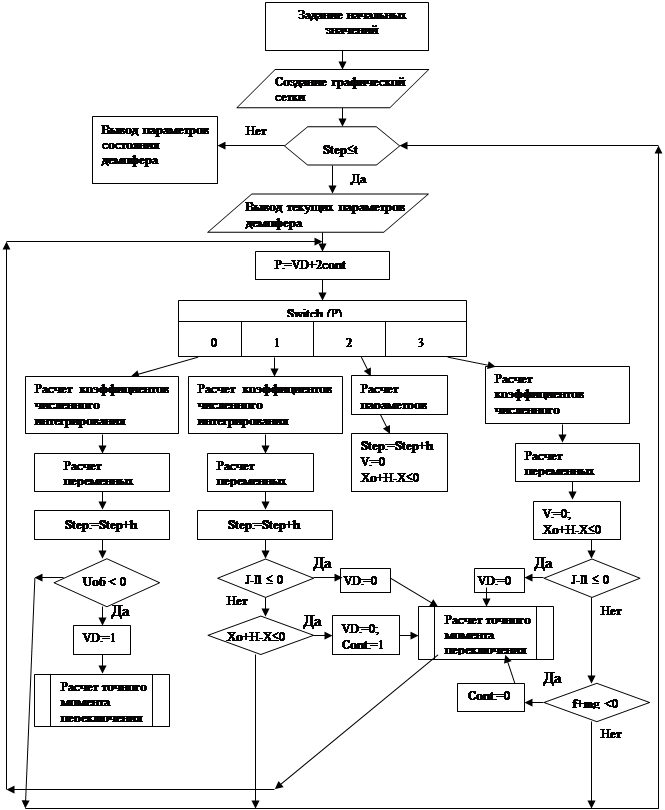
Текст программы представлен ниже. Блок схема изображена на рис.4.7. Основные переменные программы и их назначение приведены в таблице 4.1.
Таблица 4.1.
Таблица идентификаторов.
| Имя переменной | Назначение переменной в программе |
| Cont, VD | Логические переменные. |
| P, i, j, egavga, mode | Вспомогательные целочисленные переменные. |
| dpr, z, rr, w,hp, hk, bk, d, m, R | Исходные параметры демпфера заданные в техническом задании. |
| k1,k2,k3,k4,k5,k11,k22,k33,k44,k55,kk1,kk2,kk3,kk4,kk5,kv,kv2,kv3,kv4,kv5 | Переменные коэффициенты численного интегрирования. |
| Ymax, Ymin, Vmax, Vmin, Xmin, Xmax, Fmin, Fmax, bmax, bmin, hmax, hmin | Переменные обозначающие диапазон изменения соответствующей величины. |
| h | Шаг интегрирования. |
| IL, Y, V,X | Динамические переменные состояния ЭМД. |
| Step | Момент интегрирования. |
| Go, gm, g1 | Магнитные проводимости. |
Блок-схема программы.
 | ||||
 | ||||
| ||||
ЗАКЛЮЧЕНИЕ
В данной курсовой работе был исследован электромагнитный демпфера. Были получены зависимости от времени высоты и скорости груза, тока в обмотке и магнитной индукции в сердечнике. При заданных параметрах электромеханической системы достигается удовлетворительное демпфирование, то есть скорость в момент удара массы об опору не превышает ¼ от посадочной скорости массы без демпфера. Удовлетворительное демпфирование достигается лишь в небольшом диапазоне значений Н и Хо, близких к заданным.
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
|
|
|
1. Методические указания к выполнению курсовой работы по курсу "Математическое моделирование устройств промышленной электроники на ЭВМ".-ТПИ,1995;
2. Конспект лекций по "Методам математического анализа и расчёта электронных схем".








