 2020-09-24
2020-09-24 167
167
кпдφ1φ1
n2
М2
n2
P2
М2
1. Скоростная характеристика n2 = f(P2).
n2 = n1(1-S), S =PЭ2/PЭМ
В режиме холостого хода потери PЭ2 невелики, но по мере увеличения нагрузки на валу эти потери и скольжение Sзначительно возрастают и скорость вращения двигателя уменьшается, чем и объясняется наклон характеристики.
2. Зависимость М2= f(Р2).
Зависимость полезного момента на валу от полезной мощности
М2 = 9.55Р2/n2
С увеличением нагрузки на Р2 валу полезный момент М2 также увеличивается.
3. Зависимость cosφ1 = f(P2)
Ток холостого хода при любой нагрузке практически не меняется и обмотка статора в этом режиме имеет большую индуктивность так, что при этом cosφ1 ≈ 0.2.
При увеличении Р2 активная составляющая тока статора I1 растёт и поэтому растёт cosφ1.
4. Зависимость η =f(P2).
Вначале полезная мощность на валу невелика и КПД небольшой, но по мере возрастания полезной мощности P2 КПДвначалерастёт быстро, но мере роста потребляемого тока растут и электрические потери в обмотках статора 
 и ротора PЭ1 и PЭ2поэтому дальнейший рост КПД прекращается.
и ротора PЭ1 и PЭ2поэтому дальнейший рост КПД прекращается.
Однофазные АД.
Однофазный ток статора электродвигателя создает пульсирующее магнитное поле, которое разлагается на два поля прямой и обратной последовательности, имеющих равные амплитуды и вращающиеся в противоположные стороны с одинаковой частотой.
При неподвижном роторе эти поля создают одинаковые по величине, но разные по знаку моменты. Поэтому при пуске результирующий момент двигателя равен нулю, и двигатель не может начать вращаться.
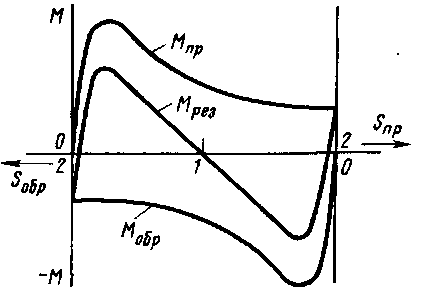 Однако если ротор привести во вращение в ту или иную сторону, то один из моментов будет преобладать и вал двигателя будет продолжать вращаться в сторону начального вращения.
Однако если ротор привести во вращение в ту или иную сторону, то один из моментов будет преобладать и вал двигателя будет продолжать вращаться в сторону начального вращения.
Механические характеристики однофазного электродвигателя.








