 2014-02-02
2014-02-02 3842
3842Любой технологический процесс характеризуется определенными физическими величинами, которые необходимо поддерживать постоянными или изменять по какому-либо закону. Так, для обеспечения нормальной работы барабанного парового котла необходимо поддерживать давление пара, подаваемого потребителю, температуру пара и уровень воды в барабане котла при переменных нагрузках. Расход и давление пара регулируются изменением подачи топлива, причем в соответствии с количеством и качеством топлива изменяется расход воздуха, подаваемого на горение, и количество удаляемых из котла продуктов сгорания.
Физические величины, определяющие ход технологического процесса, называют параметрами технологического процесса (давление, температура, уровень жидкости, концентрация вещества, расход вещества или энергии, скорость изменения какой-либо величины и т.п.).
Параметр технологического процесса, который необходимо поддерживать постоянным или изменять по определенному закону, называется регулируемой величиной (управляемой величиной) или регулируемым параметром.
Значение регулируемой величины, которую необходимо получить в процессе регулирования, называют заданным значением. Значение же регулируемой величины в рассматриваемый момент времени называется ее мгновенным или истинным значением. Значение регулируемой величины (или какой-либо другой), полученное в рассматриваемый момент времени измерительным прибором, называют измеренным значением.
Любые машины, агрегаты, технологические процессы, в которых требуется что-либо регулировать, называют объектом регулирования (объектом управления).
В любом объекте регулирования имеется приток среды (или энергии) в объект и ее расход из объекта. Как правило, расход среды (или энергии) из объекта поступает к потребителю, который может изменять его в соответствии со своими потребностями.
Под материальной средой или энергией понимается подача воды, топлива, пара, воздуха, тепла и т.п.
Те устройства, с помощью которых можно изменять расход среды (или энергии), называют регулирующими органами (управляющими органами), например: регулирующие клапаны, заслонки, направляющие аппараты, питатели и т.п..
Объекты регулирования могут работать в двух режимах: в установившемся (статическом) и неустановившемся (динамическом).
Объект регулирования работает в установившемся режиме, если полностью соблюдается материальный (или энергетический) баланс между притоком среды (или энергии) в объект и их расходом из объекта. В объекте не происходит никаких изменений и основные параметры, характеризующие условия протекания процесса, остаются неизменными. Объект не требуется регулировать.
В рабочих условиях установившийся режим постоянно нарушается вследствие изменения условий протекания процесса, те в результате различных возмущений, действующих на объект регулирования. Нарушается материальный или энергетический баланс между притоком среды (или энергии) и ее расходом, который приводит к накоплению в объекте среды (или энергии) или к уменьшению их запаса, что сопровождается изменением параметров, характеризующих процесс. Наступает неустановившийся (динамический) режим. Объект требуется регулировать.
Основной причиной нарушения материального (или энергетического) баланса в объекте являются возмущения, наносимые потребителями среды (или энергии).
Рассмотрим эти понятия на примере бака с водой как объекта регулирования уровня (рис. 1.1).
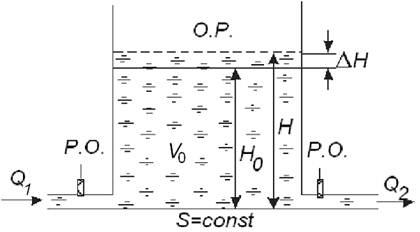 | Рис. 1.1. О.Р. – объект регулирования; Р.О. – регулирующий орган; Q 1 – приток среды; Q 2 – расход среды; H – уровень воды в баке; H 0 – заданное значение уровня; S – сечение бака; V 0 – объем жидкости в баке при статическом режиме |
Рис. 1.1. Объект регулирования уровня.
В бак подается расход воды Q 1 (приток материальной среды) и отбирается расход Q 2 (расход материальной среды). Если Q 1= Q 2, то бак (объект регулирования уровня воды) находится в статическом режиме работы и Н = Н 0, т.е. уровень воды в баке Н 0=const. Его можно принять за заданное значение. Если потребитель уменьшит расход Q 2 (прикроет регулирующий орган Р.О.), то в баке возникнет небаланс расходов (Q 1> Q 2). Тогда избыток воды идет на увеличение объема воды в баке, т.е. при постоянной площади бака S уровень воды в баке Н будет увеличиваться и через время D t возрастет на величину D Н. При Q 1< Q 2 уровень в баке будет уменьшаться. Бак будет находиться в неустановившемся (динамическом, переходном) режиме работы.
Задача регулирования – вернуть регулируемый параметр к заданному значению, которое необходимо для нормального хода технологического процесса. Единственным путем влияния на регулируемый параметр является изменение притока (или расхода) материальной среды или энергии в объект регулирования. Чаще всего для регулирования используют воздействие на приток, так как расход среды определяется потребителем (допустим, потребление воды, пара и т.п.).
При ручном регулировании уровня воды в баке (рис. 1.1) последовательность действий человека (оператора) следующая: по прибору определяется измеренное значение уровня Н, которое сравнивается с заданным значением Н 0 (обычно это значение отмечено на шкале измерительного прибора или известно оператору); при Н > Н 0 или Н < Н 0 оператор закрывает (Н > Н 0) или открывает (Н < Н 0) регулирующий орган на притоке воды. Таким образом, при регулировании должно быть произведено сравнение измеренного значения параметра (Н) с его заданным значением (Н 0) и выработан сигнал для управления (±D Н = Н 0 – Н). При автоматическом управлении действия оператора заменяются работой автоматических устройств, выполняющих ту же последовательность операций.
Комплекс устройств, присоединяемых к регулируемому объекту и обеспечивающих автоматическое поддержание заданного значения его регулируемой величины или изменение ее по определенному закону, называют автоматическим регулятором (управляющим устройством).
Основными устройствами (элементами) автоматического регулятора уровня будут: измерительное устройство (датчик уровня, преобразующий измеренное значение уровня в выходной электрический сигнал); элемент сравнения, сравнивающий электрический сигнал от датчика с электрическим сигналом заданного значения уровня и дающий на выходе сигнал рассогласования в электрическом виде; усилитель сигнала рассогласования и исполнительный механизм (сервопривод, серводвигатель), осуществляющий механическое перемещение регулирующего органа. Последовательно соединенный комплекс этих устройств и представляет собой простейший автоматический регулятор непрямого действия (использует электрическую энергию для работы исполнительного механизма). Его можно представить в виде структурной схемы с указанием входных и выходных величин (рис. 1.2).

Рис. 1.2. Структурная схема автоматического регулятора:
ИУ – измерительное устройство (датчик); ЭС – элемент сравнения; УУ – усилитель (управляющее устройство); ИМ – исполнительный механизм; Н – уровень;
y – электрическое представление измеренного значения уровня; y0 – электрическое представление заданного значения уровня (Н 0); Dy – сигнал рассогласования в электрическом виде); s – управляющий усиленный сигнал; mрег – регулирующее (управляющее) воздействие на регулирующий орган (РО)
В общем случае совокупность объекта управления и управляющего устройства образует автоматическую систему управления (АСУ). В простых случаях (при регулировании) систему управления называют автоматической системой регулирования (АСР, САР).
В дальнейшем рассматривается только теория систем автоматического регулирования.
Причинами, выводящими систему регулирования из положения равновесия, являются различного рода возмущения: внешние и внутренние. Внешние являются основным типом возмущений, на которые система регулирования реагирует сразу. К ним, как правило, относится потребитель, изменяющий нагрузку на объект регулирования. К внутренним возмущениям относятся нестабильность работы элементов регулятора, ухудшение качества работы горелок (котельных агрегатов, печей), занос золой поверхностей нагрева и т.п. Эти возмущения постепенно сказываются на работе системы и устраняются в процессе регулирования.
Систему автоматического регулирования (САР) можно представить в виде структурной схемы, состоящей из отдельных элементов, соединенных между собой линиями связи. В САР используют регуляторы прямого и непрямого действия. В регуляторах прямого действия для управления перемещением регулирующего органа достаточно усилия, развиваемого измерительным устройством регулятора (регуляторы давления, уровня, расхода, температуры). Значительно чаще применяются регуляторы непрямого действия, в которых для перемещения регулирующего органа используются посторонние источники энергии (электричество, воздух, жидкость).
Обычно при изображении объекта регулирования на структурной схеме САР источник энергии и потребитель не указываются. Влияние потребителя на объект регулирования заменяется внешним возмущением. Входной величиной объекта, как правило, является приток среды (или энергии), а выходной величиной (выходным параметром) – регулируемый параметр. К объекту регулирования подсоединяется автоматический регулятор. Структурная схема такой простейшей системы автоматического регулирования уровня приведена на (рис. 1.3).

Рис. 1.3. Структурная схема САР:
Р.О. – регулирующий орган; О.Р. – объект регулирования; l – внешнее возмущение (от потребителя); Н – уровень; j – общее обозначение регулируемого параметра
Простейшие схемы автоматического регулирования любого другого параметра (помимо уровня Н), обозначенного на рис. 1.3 буквой j, будут идентичными.
Из структурной схемы САР следует, что регулятор создает совместно с объектом замкнутую систему регулирования.
Ввиду большого разнообразия существующих систем регулирования (управления) проведена их классификация по различным признакам.

