 2014-02-02
2014-02-02 1500
1500Механической характеристикой называется зависимость частоты вращения двигателя от вращающего момента п2 = f(M) при U1 =const. Ее можно построить, используя зависимость М = f(s) и соотношение между п2 и s. Из формулы  получаем, что п2 =(1- s) n1 = п1 - n1s, откуда видно, что частота вращения ротора п2 и скольжение s являются линейно зависимыми величинами (при п1 =const). При s=1 п2= 0, апри s=0 п2 = n1. Следовательно, точке s =1 на оси абсцисс соответствует точка n 2=0, т. е. начало оси для частоты вращения. Увеличению частоты вращения п2 соответствует направление оси абсцисс справа налево. Совместив начала осей для момента М и частоты п2 и повернув оси на угол 90° по часовой стрелке, получим механическую характеристику асинхронного двигателя (рисунок а).
получаем, что п2 =(1- s) n1 = п1 - n1s, откуда видно, что частота вращения ротора п2 и скольжение s являются линейно зависимыми величинами (при п1 =const). При s=1 п2= 0, апри s=0 п2 = n1. Следовательно, точке s =1 на оси абсцисс соответствует точка n 2=0, т. е. начало оси для частоты вращения. Увеличению частоты вращения п2 соответствует направление оси абсцисс справа налево. Совместив начала осей для момента М и частоты п2 и повернув оси на угол 90° по часовой стрелке, получим механическую характеристику асинхронного двигателя (рисунок а).
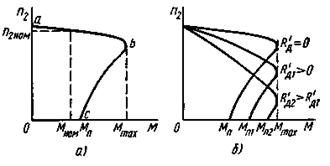
На ней можно отметить: максимальный момент Мтах: пусковой момент Мп (при пуске двигателя, т. е. при п2= 0); номинальный момент Mном, соответствующий номинальному режиму работы двигателя (ему соответствует номинальная частота вращения ротора п2ном, указываемая в паспорте двигателя).
Чтобы двигатель начал вращаться под нагрузкой, необходимо, чтобы его пусковой момент был больше пускового момента приводимого во вращение механизма. Двигатель разгоняется в соответствии с механической характеристикой: разгон начинается с точки с, затем проходится точка b и двигатель оказывается в установившемся режиме, т. е. вращается с частотой n2 на участке a-b в точке, соответствующей условию М = Мт (где Мт – тормозной момент). Таким образом, точки характеристики на участке b-с соответствуют разгону, а рабочим участком является участок a-b, на котором при изменении вращающего момента от 0 до Мmах частота вращения двигателя меняется мало. Такая механическая характеристика называется жесткой характеристикой.
Устойчивая работа двигателя, т. е. работа при n2= const, возможна только на участке а-b. Допустим, что в исходном режиме двигатель работает в точке а' механической характеристики, т. е. имеет частоту вращения  и развивает вращающий момент M’. Если при этом увеличивается тормозной момент от
и развивает вращающий момент M’. Если при этом увеличивается тормозной момент от  до
до  , то возникает неравенство моментов: М' < Мт”. Так как тормозной момент больше вращающего, ротор двигателя начинает тормозиться, увеличиваются скольжение, ЭДС и ток ротора, а следовательно, и вращающий момент двигателя. Замедление ротора продолжается до тех пор, пока не наступит равенство моментов: М"=М"т. При этом устанавливается постоянная частота вращения
, то возникает неравенство моментов: М' < Мт”. Так как тормозной момент больше вращающего, ротор двигателя начинает тормозиться, увеличиваются скольжение, ЭДС и ток ротора, а следовательно, и вращающий момент двигателя. Замедление ротора продолжается до тех пор, пока не наступит равенство моментов: М"=М"т. При этом устанавливается постоянная частота вращения  (
( ). Этим значениям соответствует точка а". При уменьшении тормозного момента рассматриваемые величины изменяются в обратном порядке. Таким образом, как бы ни изменялся тормозной момент, в пределах участка а-b двигатель может так изменить вращающий момент, что условие его устойчивой работы всегда сохраняется. В этом заключается свойство внутреннего саморегулирования асинхронного двигателя.
). Этим значениям соответствует точка а". При уменьшении тормозного момента рассматриваемые величины изменяются в обратном порядке. Таким образом, как бы ни изменялся тормозной момент, в пределах участка а-b двигатель может так изменить вращающий момент, что условие его устойчивой работы всегда сохраняется. В этом заключается свойство внутреннего саморегулирования асинхронного двигателя.
Когда тормозной момент становится равным максимальному, вращающий момент начинает уменьшаться и равенство М=МТ становится невозможным – двигатель останавливается. Поэтому максимальный момент называют также опрокидывающим моментом. По значению отношения максимального момента к номинальному (Мтах/Мном=γ) судят о перегрузочной способности двигателя. У асинхронных двигателей γ =1,7÷2,5. Для устойчивой работы двигателя нельзя допускать γ <1,7.
Двигателю с фазным ротором соответствует семейство механических характеристик (рисунок б). Обычно работа двигателя соответствует зависимости с Rд’ =0. Эта характеристика аналогична характеристике двигателя с короткозамкнутым ротором и называется естественной.
Рабочие характеристики. Изменение различных электрических и механических параметров двигателя в нормальном режиме описывается рабочими характеристиками, под которыми понимают зависимости n2, s, М2, I1, cos φ, η от мощности Р2 на валу двигателя при U1 =const и f =const.
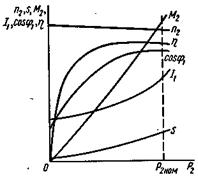
Из механической характеристики видно, что в диапазоне изменения нагрузки от нуля до Мном частота вращения двигателя п2 меняется мало. Так как нагрузку двигателя можно оценивать как тормозным моментом, так и механической мощностью Р2, то можно сказать, что частота вращения п2 меняется мало при изменении Р2 от нуля до номинального значения Р2ном.
Скольжение s ротора связано с п2 следующим образом:
s =(n1-п2)/п1 =1- n2/n1 /
При холостом ходе двигателя (Р2 =0) п2≈n1 и скольжение s мало отличается от нуля (s >0). С увеличением Р2 частота вращения n2 несколько уменьшается, а скольжение – увеличивается.
Тормозной момент на валу двигателя М2=P2 / (2πп2). Так как с увеличением Р2 частота вращения ротора n2 несколько уменьшается, то зависимость М(Р2) несколько отклоняется от линейной. Электромагнитный вращающий момент М больше момента нагрузки М2 на значение момента холостого хода М0.
Ток статора I1 определяется по формуле  и имеет две составляющие: постоянную I 0 и переменную I 2, зависящую от нагрузки. При холостом ходе можно считать I 2=0 и I1 = I 0, т. е. ток статора равен току холостого хода, значение которого у асинхронных двигателей достигает 40-60% от номинального значения I1 ном. При увеличении мощности Р2 увеличиваются ток I 2’ и ток I1.
и имеет две составляющие: постоянную I 0 и переменную I 2, зависящую от нагрузки. При холостом ходе можно считать I 2=0 и I1 = I 0, т. е. ток статора равен току холостого хода, значение которого у асинхронных двигателей достигает 40-60% от номинального значения I1 ном. При увеличении мощности Р2 увеличиваются ток I 2’ и ток I1.
Так как при холостом ходе I1 = I 0 и его основной составляющей является намагничивающая, совпадающая по фазе с магнитным потоком, коэффициент мощности cosφ10 асинхронных двигателей очень мал (0,15-0,2). С увеличением нагрузки ток статора все в большей степени определяется активной составляющей тока ротора и cos φ1 увеличивается.
Характеристика η(Р2) имеет вид, типичный для электрических машин. Сначала КПД резко увеличивается начиная от нуля, а затем меняется мало

