 2014-02-09
2014-02-09 10187
10187Все механизмы грузоподъемных машин снабжаются надежно действующими тормозными устройствами, обеспечивающими в механизмах подъема остановку груза и удержание его в подвешенном состоянии, а в механизмах передвижения и поворота – остановку механизма на определенной длине тормозного пути.
Для повышения производительности механизма желательно сокращение периода торможения, но чтобы при этом в элементах привода не возникали напряжения, значительно превосходящие допускаемую статическую перегрузку, вследствие чего нарушается прочность соединений, повышенный износ муфт, подшипников, ходовых и зубчатых колес.
Механические тормоза являются необходимыми узлами грузоподъемной машины, т.к. даже электрическое торможение обычно только снижает скорость, а полную остановку механизмов, производят механические тормоза.
Остановы – простейшие приспособления, не препятствующие подъему груза и исключающие возможность его самопроизвольного спуска под действием собственного веса.
В ПТМ применяют храповые и роликовые остановы.
1. Храповые остановы.
Храповой останов (рис. 33) состоит из храпового колеса 1 (храповика), жестко соединенного с валом 2, который нужно удержать от вращения, и собачки 3, входящей в зацепление с зубцами храповика. Особая форма зубцов позволяет собачке, посаженой на ось 4, при подъеме груза свободно скользить по затылочной поверхности зубцов, не препятствуя вращению вала. При 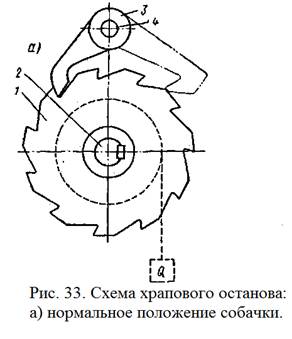 прекращении подъема под действием момента от груза вал с храповиком стремятся повернуться в противоположную подъему сторону. Собачка, входящая в ближайшую впадину зубцов храповика, создает упор, и вращение вала прекращается. Выводят собачку из зацепления специальным приводом или вручную. Материалом для храповика и собачки служит сталь.
прекращении подъема под действием момента от груза вал с храповиком стремятся повернуться в противоположную подъему сторону. Собачка, входящая в ближайшую впадину зубцов храповика, создает упор, и вращение вала прекращается. Выводят собачку из зацепления специальным приводом или вручную. Материалом для храповика и собачки служит сталь.
Остановка храповика сопровождается ударом, сила которого зависит от числа зубцов Z. Поэтому храповики делают с большими числами зубцов Z = 10 – 30, а иногда ставят две собачки. Храповики с внутренним зацеплением обладают более прочными зубцами и большей компактностью конструкции.
Форма собачки может быть такой, что ее тело будет испытывать напряжение сжатия или расширения. Для обеспечения надежной работы соединения собачка прижимается к храповому колесу пружиной.
Работа храпового соединения сопровождается характерным, неприятным шумом. Для уменьшения шума применяют конструкции бесшумных собачек, в которых специальное устройство отводит собачку от храпового колеса при движении механизма в сторону подъема.
2. Фрикционные остановы.
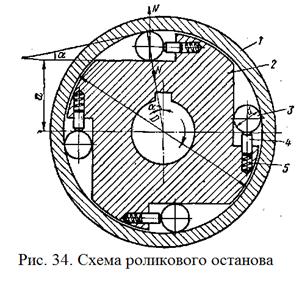
Фрикционные остановы обеспечивают более плавную остановку вала. Бывают роликовые (шариковые) (рис. 34) и эксцентриковые.
Роликовые остановы состоят из неподвижного корпуса 1 и вращающегося кольца 2 со специальными пазами для роликов 3. При вращении на подъем кольцо с роликами беспрепятственно вращается вместе с валом. При движении вала на спуск ролик выталкивается пружиной в конический паз и заклинивается между корпусом и кольцом. Для быстрого заклинивания имеется пружина 5 и штифт 4.
Эксцентриковый останов.
При вращении в направлении спуска тормозной диск увлекает эксцентрик и заклинивает его. Эксцентриковые остановы создают большее давление на вал и при истирании эксцентрика могут отказать в работе.
Назначение и классификация тормозов.
Тормоза предназначены для уменьшения скорости движения и остановки механизмов ГПМ. Тормоза механизмов подъема груза должны удерживать поднятые грузы. Тормоз устанавливается на валу механизма грузоподъемной машины, где посредством сил трения создает тормозной момент, значение которого больше крутящего момента, развиваемого приводом механизма.
Классификация тормозов по разным признакам.
1. Классификация тормозов по назначению:
· стопорные – обеспечивают остановку и удержание груза в заданном положении и обычно включается в конце движения, выполняя роль, аналогичную останову.
· спускной – может удерживать поднятый груз и ограничивает скорости спуска груза в заданных пределах.
· регуляторы скорости – не могут удерживать механизм в заданном положении и служат только для изменения диапазонов скоростей при спуске груза.
2. По принципу действия:
· автоматические;
· управляемые.
3. По системе взаимодействия рабочих деталей:
· нормально разомкнутый тормоз при неработающем механизме не обеспечивает контактов между рабочими деталями, создающими тормозной момент. Контакт между трущимися рабочими деталями работающего механизма создается при торможении.
· нормально замкнутые тормоза при неработающем механизме обеспечивают контакт рабочих деталей, следовательно, и тормозной момент. При пуске механизма происходит растормаживание. Эти тормоза более безопасные, чем разомкнутые.
4. По роду привода:
· ручные (ножные),
· электромагнитные,
· грузовые,
· гидравлические,
· центробежные.
Конструктивные различия тормозов:
· колодочные – рабочие детали колодки;
· ленточные – ленты;
· дисковые – диски.








