 2014-02-09
2014-02-09 2252
22529.1. Общие положения.
При исследовании систем автоматического регулирования приходится решать задачу обеспечения требуемых показателей качества переходного процесса: быстродействия, колебательности, перерегулирования, характеризующих точность и плавность протекания процесса. Будем, как и в предыдущих главах полагать, что САР описывается системой линейных дифференциальных уравнений с постоянными коэффицентами. При изменении воздействия на входе системы (рис.9.1) выходную величину можно записать так:
 (9.1)
(9.1)
где y(t) - решение дифференциального уравнения, описывающего систему; yсв(t) - свободная составляющая переходного процесса, соответствующая общему решению однородного дифференциального уравнения; yв(t) - вынужденная (установившаяся) составляющая переходного процесса обусловленная законом изменения x(t).
Если общее решение однородного дифференциального уравнения не имеет кратных корней, то
 (9.2)
(9.2)
где Ci - постоянная интегрирования, значение которой определяют параметры системы и начальные условия; si - корни характеристического уравнения замкнутой системы D(s)= 0;
 x(t) x0(t) y(t)
x(t) x0(t) y(t)
-
Рис. 9.1
Из (9.1) видно, что качество переходного процесса можно оценить по его составляющим yсв(t) и yв(t). В этом смысле различают две группы показателей: первая группа - показатели качества переходного процесса yсв(t); вторая - показатели, характеризующие вынужденную (установившуюся) составляющую yв(t), по которой определяют точность системы.
Показатели качества, определяемые непосредственно по кривой переходного процесса, называют прямыми оценками качества. Кривая переходного процесса может быть получена аналитически или экспериментально.
В тех случаях, когда расчет переходного процесса связан с большими трудностями, используют косвенные оценки качества. Например, к косвенным оценкам можно отнести запасы устойчивости по фазе и по амплитуде, рассмотренные в гл.8.
9.2. Показатели качества регулирования.
В большинстве практических случаев устойчивость не является достаточным условием нормального функционирования системы автоматического регулирования. В зависимости от заданного технологического режима САУ должна обеспечивать требуемое качество работы установки в переходных режимах, вызванных изменением задающего либо возмущающего воздействия. Качество регулирования принято оценивать следующими основными показателями: величиной перерегулирования, быстродействием, или временем регулирования, и числом колебаний регулируемой величины за время переходного процесса.
Перерегулированием называется отношение разности между максимальным и установившимся отклонением регулируемой величины к ее установившемуся отклонению. На рис. 9.2. показано изменение регулируемой величины при ступенчатом воздействии.
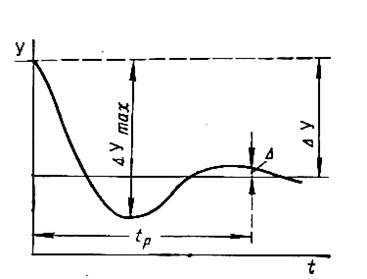
Рис.9.2 Показатели качества регулирования
Перерегулирование определяется выражением:
 (9.3)
(9.3)
где  - максимальное отклонение регулируемой величины;
- максимальное отклонение регулируемой величины;
 - установившееся отклонение регулируемой величины.
- установившееся отклонение регулируемой величины.
Допустимое перерегулирование определяется конкретными условиями работы и назначением САУ. Для систем, работающих при задающих воздействиях, обычно допускают  =18-25%. Для САУ работающих при возмущающих воздействиях, значения могут достигать гораздо больших значений.
=18-25%. Для САУ работающих при возмущающих воздействиях, значения могут достигать гораздо больших значений.
Быстродействие, или время регулирования, tp представляет время, в течении которого отклонение регулируемой величины от  y превышает некоторое допустимое значение:
y превышает некоторое допустимое значение:
 (9.4)
(9.4)
где  - текущее отклонение регулируемой величины. В большинстве случаев принимают
- текущее отклонение регулируемой величины. В большинстве случаев принимают  .
.
Число колебаний регулируемой величины N за время переходного процесса tp должно быть ограничено. Обычно его принимают не более трех.
Работа САУ характеризуется точностью, под которой понимается степень приближения действительного выходного сигнала y к его заданному значению y0 .
Величина  называется ошибкой САУ. Установившаяся ошибка отработки постоянного сигнала называется статической ошибкой (статизмом). Текущая ошибка отработки переменного сигнала называется динамической ошибкой САУ. Динамическая ошибка системы изменяется с течением времени. Она зависит от структуры, параметров и характера изменения воздействий САУ.
называется ошибкой САУ. Установившаяся ошибка отработки постоянного сигнала называется статической ошибкой (статизмом). Текущая ошибка отработки переменного сигнала называется динамической ошибкой САУ. Динамическая ошибка системы изменяется с течением времени. Она зависит от структуры, параметров и характера изменения воздействий САУ.
Статическая ошибка замкнутой системы может быть определена непосредственно по передаточной функции системы при p(s)=0. Так, например, для статической системы при задающем воздействии будем иметь:
Астатическая система на входе содержит интегрирующее звено. Поэтому при постоянном воздействии (t=¥) ошибка системы  , так как y=y0.
, так как y=y0.
 Наиболее достоверные данные о показателях качества регулирования можно получить прямым методом--по кривой переходного процесса, найденной расчетным либо экспериментальным путем при соответствующем виде воздействия. Расчет переходного процесса производится на основании дифференциального или операторного уравнения системы, составленного по его структурной схеме.
Наиболее достоверные данные о показателях качества регулирования можно получить прямым методом--по кривой переходного процесса, найденной расчетным либо экспериментальным путем при соответствующем виде воздействия. Расчет переходного процесса производится на основании дифференциального или операторного уравнения системы, составленного по его структурной схеме.

