 2014-02-12
2014-02-12 2001
2001Сущность способов вращения заключается в том, что заданную геометрическую фигуру путём вращения вокруг некоторой оси перемещают в пространстве до тех пор, пока она не займёт частное положение относительно плоскостей проекций.
Эффективным приёмом, упрощающим решение задач, связанных с определением метрических характеристик плоских фигур, является способ вращения этих фигур вокруг их линий уровня. Путём такого вращения можно плоскость, которой принадлежит рассматриваемая фигура, повернуть в положение, параллельное плоскости проекции.
(Сущность способа в том, что путём вращения вокруг линий уровня плоскость, в которой расположена фигура, переводится в положение, параллельное той плоскости проекций, которой параллельна прямая частного положения (линия уровня)).
При этом плоская фигура будет без искажения проецироваться на эту плоскость проекций.
При вращении вокруг горизонтали плоская фигура переводится в положение, параллельное плоскости H, при вращении вокруг фронтали в положение, параллельное плоскости V.
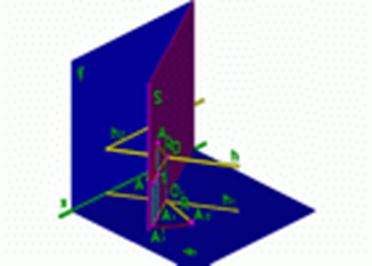 Рис.1 Рис.1 |
Точка A при вращательном движении перемещается по дуге (окружности), расположенной в плоскости, которая перпендикулярна оси вращения. Центр окружности будет находиться на оси вращения, а величина радиуса равна расстоянию от точки до оси вращения.
Т.к. в нашем случае ось вращения - горизонталь, то, следовательно, траектория точки А будет находиться в горизонтально-проецирующей плоскости.
S H; Sh; SHh1; [OAI]
H; Sh; SHh1; [OAI] H
H
Точка O - центр вращения O=S h
h
AAI [A1AI1]h1
[A1AI1]h1
На плоскость V окружность проецируется в эллипс (это построение мы не делаем).
Для того, чтобы на комплексном чертеже переместить точку A путём вращения вокруг линии уровня, нужно знать:
- центр вращения,
- истинную величину радиуса вращения.
Центр вращения O, как уже отмечено, находится в точке пересечения h с плоскостью S. Чтобы определить величину радиуса вращения |OA|, необходимо построить в плоскости Н прямоугольный треугольник  О1А1A0. О1А0A1
О1А1A0. О1А0A1  ОA1 Для этого за катет принимаем горизонтальную проекцию [O1A1] отрезка OA; второй катет равен разности аппликат концов отрезка ОА |zA-zAI|=|A1|. Гипотенуза О1А1A0 это O1A0=R.
ОA1 Для этого за катет принимаем горизонтальную проекцию [O1A1] отрезка OA; второй катет равен разности аппликат концов отрезка ОА |zA-zAI|=|A1|. Гипотенуза О1А1A0 это O1A0=R.
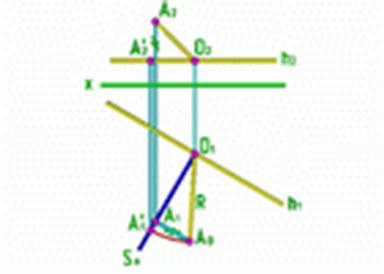 Рис.2 Рис.2 |
Новое, после поворота, положение точки AI1 находится в месте пересечения дуги окружности, проведённой из горизонтальной проекции центра вращения O1, радиусом, равным [O1A0] с горизонтальным следом SH плоскости S.
Пример: Дана плоскость P (ABC) - общего положения. Нужно вращением вокруг фронтали определить истинную величину треугольника (ABC).
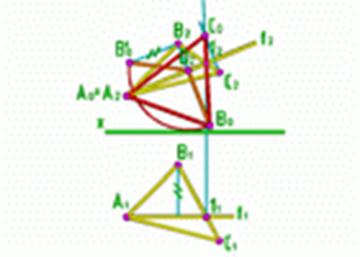 Рис.3 Рис.3 |
Ход решения:
- Строим фронталь в плоскости P;
- Из точки B2 проводим перпендикуляр к f2;
- Из точки C2 проводим перпендикуляр к f2;
- R=O2BI0

