2014-02-13
2014-02-13 866
866Исторически геометрическая задача самая древняя задача металлорежущих станков и ранее было фактически в единственном числе.
Геометрическая задача может считаться решенной, если на любом этапе обработки обеспечиваются заданные параметры движения.
Следовательно станок с ЧПУ должен автоматически обеспечивать следующие параметры движения:
- Траектория
- Направление
- Скорость
- Путь
- Исходная точка
Если считать элементарным движение параллельно оси координат, то в токарном их будет 2 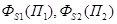 , фрезерном 3
, фрезерном 3  .
.
Любое движение не параллельное оси координат можно рассматривать как сложное
С точки зрения программирования геометрическая задача ЧПУ сводится к набору символов кода ISO называемых адресами и определяющих соответствующих параметров движения. G1, G2, G3 { I, J, K
F- скорость
путь, направление X, Y, Z (G90/G91)
Исходная точка это координаты точки достигнутой при предыдущем движении. Эти координаты могут быть контролируемыми и не контролируемыми. Это определяется наличие или отсутствие в станке датчиков обратной связи по положению. Единственным типом станка является станок оснащенным шаговым двигателем. Этот двигатель имеет свойство поворачиваться на строго фиксированный угол пропорционально количеству импульсов на него поданных.
Предполагается, что потерь импульсов нет и соответственно нет погрешностей в точности позиционирования.
Недостатком шаговых двигателей можно считать относительно малую мощность и неспособность перемещать тяжелые столы станков и поэтому устанавливают гидравлические усилители, что усложняет конструкцию станка и его эксплуатацию.
Очевидно шаговые двигатели предпочтительны в станках малых габаритов.
Вторым направлением приводов является следящие приводы т. е. приводы с двигателями постоянного тока, поскольку положение исп. органов неопределено, они оснащаются датчиком обратной связи:
- Вращающиеся трансформаторы
- Фотоимпульсные датчики
- Измерительные линейки
- Сельсины
В конечном счете датчик обратной связи по положению является выдача информации о текущем положении рабочего органа. Это положение измеряется относительно начальной точки записанный в буферный регистр, платы оцифровки.
В фотоимпульсном датчике суммируется или вычитается колличество импульсов прошедших через щели диска в процессе вращения ходового винта.
Датчики типа резольвера – информационным сигналом является сдвиг фаз снимаемый со вторичной обмотки, на первичную обмотку подается эталонная синусоеда силой 2,5кГц.
Сдвиг фазы составляет  , сдвиг фазы соответствует углу поворота ротора
, сдвиг фазы соответствует углу поворота ротора
Структура модуля оцифровки сдвига фазы:
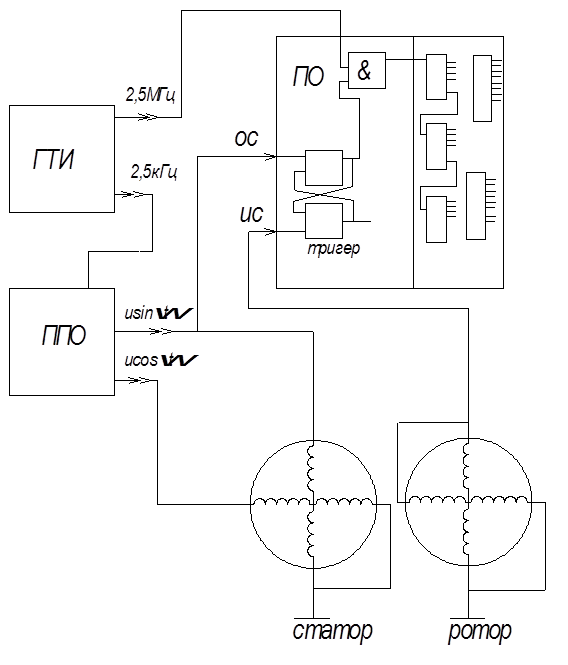
ГТИ – генератор тактовых импульсов
ППО – плата питания датчиков
ПО – плата оцифровки
ОС – опорный сигнал
ИС – информационный сигнал
Триггер управляется ОС и ИС
Триггер открывается ОС, а закрывается ИС. Длительность периода открытости триггера зависит от величины сдвига фазы.
Количество импульсов прошедших через элемент И будет пропорционально сдвигу фазы и будет соответствовать 1000 при сдвиге фазы в 3600. Дробная часть оборота имеет дискретность в 1000.
В современных счетчиках 4 целых и 8 дробных знака.
Для обеспечения заданной траектории соотношение между подачами по осям должны быть разными в зависимости от наклона прямой и тем более при круговой траектории. Вычислительная процедура рассчитывает подачу в данный момент и контролирующая положение рабочего органа в заданном положении.
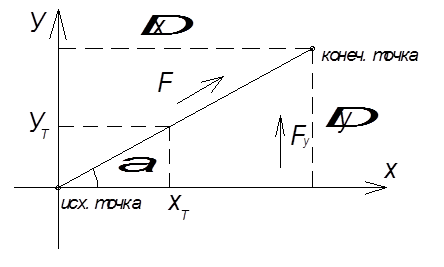
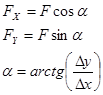
В следящих приводах соответствие заданной траектории контролируется различными математическими алгоритмами, самый простой из которых называется оценочные функции:
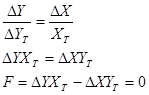
В зависимости от знака оценочной группы коррекция подачи