 2014-02-13
2014-02-13 2025
2025АЦП многотактного интегрирования имеют ряд недостатков. Во-первых, нелинейность переходной статической характеристики операционного усилителя, на котором выполняют интегратор, заметным образом сказывается на интегральной нелинейности характеристики преобразования АЦП высокого разрешения. Для уменьшения влияния этого фактора АЦП изготавливают многотактными. Например, 13-разрядный AD7550 выполняет преобразование в четыре такта. Другим недостатком этих АЦП является то обстоятельство, что интегрирование входного сигнала занимает в цикле преобразования только приблизительно третью часть. Две трети цикла преобразователь не принимает входной сигнал. Это ухудшает помехоподавляющие свойства интегрирующего АЦП. В-третьих, АЦП многотактного интегрирования должен быть снабжен довольно большим количеством внешних резисторов и конденсаторов с высококачественным диэлектриком, что значительно увеличивает место, занимаемое преобразователем на плате и, как следствие, усиливает влияние помех.
Эти недостатки во многом устранены в конструкции сигма-дельта АЦП (в ранней литературе эти преобразователи назывались АЦП с уравновешиванием или балансом зарядов). Своим названием эти преобразователи обязаны наличием в них двух блоков: сумматора и интегратора. Один из принципов, заложенных в такого рода преобразователях, позволяющий уменьшить погрешность, вносимую шумами а, следовательно увеличить разрешающую способность - это усреднение результатов измерения на большом интервале времени. Основные узлы АЦП - это сигма-дельта модулятор и цифровой фильтр. Наиболее широко в составе ИМС используются однобитные сигма-дельта модуляторы, в которых в качестве АЦП используется компаратор, а в качестве ЦАП - аналоговый комутатор (рис. 7.15).
Для формирования выходного кода такого преобразователя необходимо каким-либо образом преобразовать последовательность бит на выходе компаратора в виде
унитарного кода в последовательный или параллельный двоичный позиционный код.
В простейшем случае это можно сделать с помощью двоичного счетчика. При использовании двоичного счетчика в качестве преобразователя потока битов, поступающих с выхода компаратора, необходимо выделять фиксированный цикл преобразования, длительность которого равна произведению K сч f такт. После его окончания должно производиться считывание результата, например, с помощью регистра-защелки и обнуление счетчика. В этом случае с точки зрения помехоподавляющих свойств сигма-дельта АЦП близки к АЦП многотактного интегрирования. Более эффективно с этой точки зрения применение в сигма-дельта АЦП цифровых фильтров с конечной длительностью переходных процессов.
Сравнение сигма-дельта АЦП с АЦП многотактного интегрирования показывает значительные преимущества первых. Прежде всего, линейность характеристики преобразования сигма-дельта АЦП выше, чем у АЦП многотактного интегрирования равной стоимости. Это объясняется тем, что интегратор сигма-дельта АЦП работает в значительно более узком динамическом диапазоне, и нелинейность переходной характеристики усилителя, на котором построен интегратор, сказывается значительно меньше. Емкость конденсатора интегратора у сигма-дельта АЦП значительно меньше (десятки пикофарад), так что этот конденсатор может быть изготовлен прямо на кристалле ИМС. Как следствие, сигма-дельта АЦП практически не имеет внешних элементов, что существенно сокращает площадь, занимаемую им на плате, и снижает уровень шумов.
АЦП дифференциального кодирования (рис. 7.16) содержат реверсивный счётчик, код с которого поступает на вспомогательный ЦАП. Входной сигнал и сигнал со вспомогательного ЦАП сравниваются на компараторе. Благодаря отрицательной обратной связи с компаратора на счётчик код на счётчике постоянно меняется так, чтобы сигнал со вспомогательного ЦАП как можно меньше отличался от входного сигнала. По прошествии некоторого времени разница сигналов становится меньше, чем МЗР, при этом код счётчика считывается как выходной цифровой сигнал АЦП. АЦП этого типа имеют очень большой диапазон входного сигнала и высокое разрешение, но время преобразования зависит от входного сигнала, хотя и ограничено сверху. В худшем случае время преобразования равно Tmax=(2n)/fс, где n — разрядность АЦП, fс — частота генератора тактовых импульсов.
АЦП дифференциального кодирования обычно являются хорошим выбором для оцифровки сигналов реального мира, так как большинство сигналов в физических системах не склонны к скачкообразным изменениям.
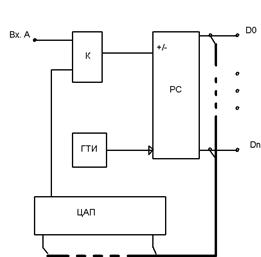
Рис. 7.16. АЦП дифференциального кодирования.
К- аналоговый компаратор, РС- реверсивный счетчик, ГТИ- генератор тактовых импульсов, ЦАП- цифро-аналоговый преобразователь.








