 2015-01-30
2015-01-30 690
690Работы Д.-К. Максвелла, И.А.Вышнеградского, А.Стодолы, заложившие основу ТАР
Лекция 5 - Непрямое регулирование. Работы А.Стодолы: «О регулировании турбин I» (1893), «О регулировании турбин II» (1984), «Принцип регулирования Cименсов и американские инерционные регуляторы» (1899)
(продолжение)
Регулятор непрямого действия без обратной связи (РНД без ОС)
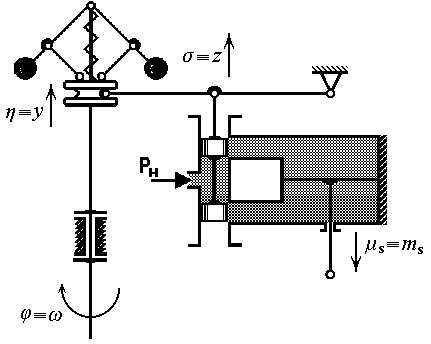
Рисунок 5.1 – Принципиальная схема РНД без ОС
Регулятор состоит из центробежного измерителя частоты вращения, гидравлического сервомотора с отсечным золотником и рычага, соединяющего муфту измерителя со штоком золотника.
Уравнения динамики (движений) РНД без ОС
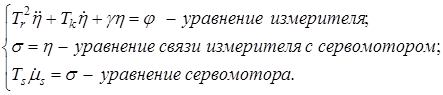 (5.1)
(5.1)
После преобразования уравнений (5.1) по Лапласу (Pierre Simon Laplas, 1749 - 1827) динамику РНД без ОС можно представить в виде следующей структурной схемы

Рисунок 5.2 – Структурная схема РНД без ОС
Уравнения динамики РНД без ОС (5.1) можно представить в виде одного уравнения
 . (5.2)
. (5.2)
После преобразования по Лапласу уравнения (5.2) динамику РНД без ОС можно представить следующей структурной схемой.
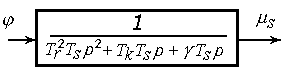
Рисунок 5.3 – Структурная схема РНД без ОС после преобразования








