 2015-02-04
2015-02-04 1318
13181. Электрические
2. Электрогидравлические
3. Бесконтактные
10.1. Системы управления электрическими палубными кранами
Грузовые краны предназначены для перемещения груза в трёх плоскостях и поэтому имеют три механизма:
1. механизм подъёма (спуска) груза;
2. механизм изменения вылета стрелы;
3. механизм поворота крана.
Все три механизма размещены на поворотной башне крана. Башня крана имеет два отдельных помещения: кабину крана спереди башни и машинное отделение с обратной стороны.
В кабине находятся органы управления механизмами крана - командоконтроллеры.
Таких контроллеров два: контроллер механизма подъёма-спуска груза и сдвоенный контроллер механизмов изменения вылета стрелы и поворота крана.
10.2. Системы управления электрогидравлическими палубными кранами
До этого применявшиеся на многих судах электрические краны с релейно-контакторными системами управления или, при мощности более 70…80 кВт, системы генератор – двигатель (Г – Д) имели два принципиальных недостатка:
1. ступенчатое регулирование скорости привода, как правило, изменением числапар полюсов;
2. жесткую программу управления, задаваемую командоконтроллером.
Этих недостатков лишены электрогидравлические краны.
У таких кранов работу для обеспечения работы всех трех механизмов используется масляные насосы, которые называется гидромоторами. Для привода в действие всх насосов служит один мощный электромотор, который через кардан и редуктор приводит в движение гидромоторы механизмов подъема, изменения вылета стрелы и поворота.
Распределительные устройства этих механизмов управляются при помощи электромагнитных клапанов.
Чем больше ток в катушке клапана, тем больше подача гидронасоса, тем больше скорость движения механизма крана, например, механизма подъёма груза. Ток в катушке регулируется переменным резистором (потенциометром), связанным с рукояткой управления данным механизмом («джостиком»).
Т.о., крановщик, отклоняя рукоятку управления механизмом на больший или меньший угол (от нулевого положения), увеличивает или уменьшает скорость движения механизма.
Этой же рукояткою задается необходимое направление движения привода, например, подъем или спуск груза.
10.3. Бесконтактные системы управления электроприводами ГПМ
Развитие полупроводниковой техники позволило перейти от контактных схем управления судовыми электроприводами к бесконтактным.
В контактных схемах для переключения цепей используют медные контакты, а в бесконтактных полупроводниковые приборы двух видов:
1. транзисторы;
2. тиристоры.
Транзисторы применяют для управления слаботочными цепями с токами до десятков ампер, тиристоры – для управления мощными силовыми цепями электроприводов с токами в десятки, сотни и тысячи ампер.
В судовых электроприводах для переключения силовых электрических цепей применяют комплектные устройства, серийно выпускаемые промышленностью – тиристорные коммутаторы (см. ниже).
10.3.1. Тиристорные коммутаторы
Тиристорным коммутатором называется схема, состоящая из 2-х встречно-параллельно включенных тиристоров и предназначенная для коммутации одного полюса цепи
(рис. 13.33)..
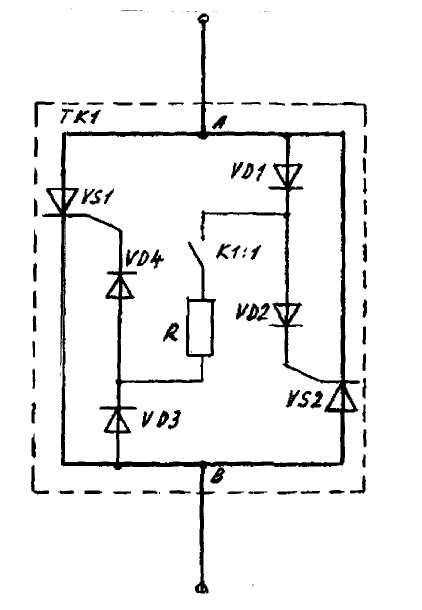
Рис. 13.33.. Схема тиристорного коммутатора переменного тока
10.3.2. Особенности построения схем на тиристорных коммутаторах
(переход от контактных схем к бесконтактным);
Таких особенностей две:
1. в силовой части схемы вместо металлических (медных) контактов контакторов применяют тиристорные контакторы (рис.13.35);
2. в схемах управления вместо мощных электромагнитных контакторов применяют слаботочные электромагнитные реле (рис. 9).
. 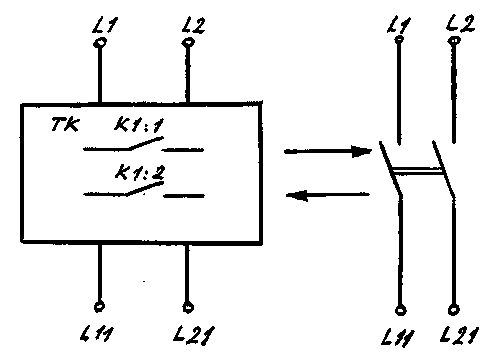
Рис. 13.35. Эквивалентные схемы силовой части: на тиристорах (левая) и металлических контактах (правая)
В остальном схемы управления контактных и бесконтактных электроприводов одинаковы.
17. Гребные электрические установки постоянного тока. Схемы включения генераторов и гребных электродвигателей.

