 2015-03-22
2015-03-22 3079
3079Формирование моделей объектов в переменных состояния:
● по известным матрицам A,B,C,D: sys_ss=ss(A,B,C,D);
● по передаточной функции объекта: sys_ss=ss(Wtf).
Формирование передаточной функции объекта по его модели в пространстве состояний: Wtf=ss(sys_ss).
Определение переходной матрицы состояния:
● при заданном шаге дискретности по времени используется функция expm:
Пример A=[0 -2;1 -3];
dt=0.2;
Phi=expm(A*dt)
Phi =
0.9671 -0.2968
0.1484 0.5219
 .
.
● с использованием операторов Pmp=inv(p*I-A) и Pmt= ilaplace(Pmp).
Определение временных характеристик:
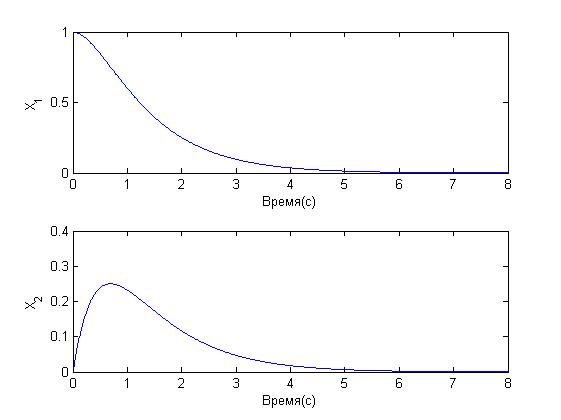
● путём использования функции [y,T,x]=lsim(sys,u,t,x0);
Пример:
A=[0 -2;1 -3];
B=[2;0];
C=[1 0];
D=[0];
sys=ss(A,B,C,D);
x0=[1 0];
t=[0:0.01:8];
u=0*t;
[y,T,x]=lsim(sys,u,t,x0);
subplot(211),plot(T,x(:,1))
xlabel('Время(с)'),ylabel('X_1')
subplot(212),plot(T,x(:,2))
xlabel('Время(с)'),ylabel('X_2')
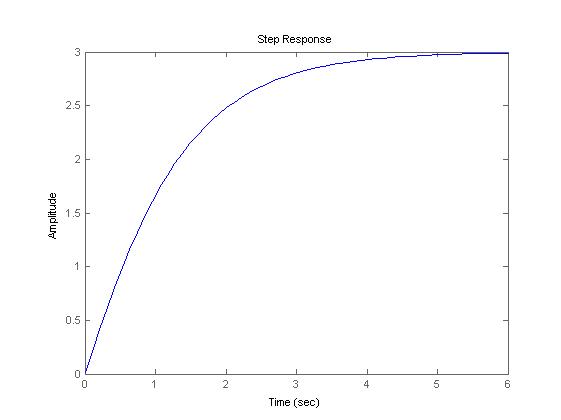
● с использованием оператора step(sysss);
Пример:
A=[0 -2;1 -3];
B=[2;0];
C=[1 0];
D=[0];
sysss=ss(A,B,C,D);
step(sysss)
● путём использования оператора dsolve;
Пример
Рассмотрим систему, передаточная функция которой имеет вид:
 .
.
Уравнения состояния и выхода системы:
 ,
,  .
.
- Вычисление переходной функции:
S=dsolve('Dx1=-3*x1+x2,Dx2=-2*x1+1,x1(0)=0,x2(0)=0')
S.x1
S.x2
S =
x1: [1x1 sym]
x2: [1x1 sym]
ans =
1/2*exp(-2*t)-exp(-t)+1/2 - переходная функция
ans =
3/2+1/2*exp(-2*t)-2*exp(-t)
- Определение матрицы перехода:
Матрица перехода определяет решение дифференциального уравнения
 ,
,
 .
.
S=dsolve('Dx1=-3*x1+x2,Dx2=-2*x1,x1(0)=x10,x2(0)=x20')
S.x1
S.x2
S =
x1: [1x1 sym]
x2: [1x1 sym]
ans =
exp(-2*t)*(2*x10-x20)+1/2*exp(-t)*(-2*x10+2*x20)
ans =
exp(-2*t)*(2*x10-x20)+exp(-t)*(-2*x10+2*x20)
Матрица перехода имеет вид:
 .
.
Литература (метод пространства состояний)
- Заде Л., Дезоер Ч. Теория линейных систем. М.: Мир, 1970.
- Справочник по теории автоматического управления/Под ред. А.А. Красовского. М.: Наука, 1987.
- Эйкхофф П. Основы идентификации систем управления. М.: Мир,1975.

