 2015-03-07
2015-03-07 1597
1597Мехатронный підхід покладений в основу машин з концептуально новим принципом побудови - так званих гексаподов. Ці технологічні машини(верстати, координатно-вимірювальні машини, роботи) мають стержневу конструкцію і побудовані на мехатронных модулях лінійного руху, в основі їх конструктивної схеми лежить платформа Стюарта.
У механізмів з паралельною кінематикою(МПК) вихідна частина у вигляді рухливої платформи зазвичай переміщається декількома з'єднаннями(«штангами»), що діють в паралелі. Шість лінійних з'єднань типу шарико-винтовых передач(ШВП) або гідроциліндрів дають до шести ступенів свободи відносно ядра - по трьох осях і трьох кутах окремо або у будь-яких комбінаціях. Цей варіант і був названий «гексаподом».
На Рис. 3.6 показана загальна схема станка-гексапода.
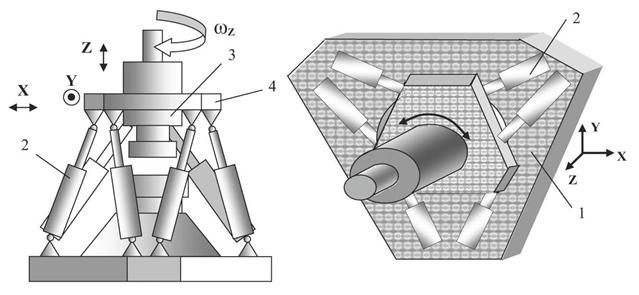
Рис. 3.6. Схема станка-гексапода
Станок-гексапод виконаний на базі шести ШВП 2 з відповідними датчиками переміщення і високомоментними двигунами, що здійснюють осьове переміщення гвинтів. Одним кінцем ШВП шарнірно сполучені з основою 1, а іншим - KJ KJ Л KJ J шарнірно з рухливою верхньою платформою 4, на якій розташований виконавчий орган - інструментальна голівка 3. Інструментом можуть служити фрези, свердла, різці, шліфувальні круги, вимірювальні наконечники. Програмно переміщаючи гвинти, можна управляти положенням виконавчого органу: переміщати його у вертикальному і горизонтальному напрямах, повертати в трьох площинах.
Розглянуті технічні рішення мехатронных технологічних систем на базі механізмів паралельної кінематики забезпечують істотні переваги в порівнянні з верстатами традиційного компонування, в першу чергу, по технологічних можливостях обробки виробів складної конфігурації і точності виконавчих рухів.
Найбільш перспективною сферою їх застосування є прецизійне верстатобудування. Результати структурного аналізу систем паралельної кінематики можуть бути використані при проектуванні нового типу автоматизованих технологічних систем.
Основними перевагами гексаподных машин є:
- скорочення часу підготовки виробництва і підвищення його рентабельності за рахунок об'єднання оброблювальних, розмічальних і вимірювальних функцій в єдиній мехатронной системі;
- висока точність вимірів і обробки, яка забезпечується підвищеною жорсткістю стержневих механізмів(до 5 разів), застосуванням прецизійних датчиків зворотного зв'язку і лазерних вимірювальних систем, використанням комп'ютерних методів корекції(наприклад, теплових дій);
- підвищена швидкість рухів(швидкість швидких переміщень досягає 10 м/с, робочих рухів - до 2,5 м/с);
- відсутність тих, що направляють(як елементи конструкції, що несуть, використовуються приводні механізми), звідси поліпшені массогабаритные характеристики і матеріаломісткість;
- висока міра уніфікації мехатронных вузлів, технологічність виготовлення і складання машини, що забезпечує, і конструктивну гнучкість;
- «висока якість управління рухом завдяки малій інерційності механізмів, застосуванню лінійних мехатронных модулів руху як об'єктів управління, використанню методів автоматизованої підготовки і виконання програм, що в реальному часі управляють, наявності доброзичливого інтерфейсу «людина - машина».
Механізми з паралельною кінематикою(МПК) не обов'язково повинні мати шість штанг. Їх може бути і три і вісім. Важливо, що просторові рухи платформі передають шляхом зміни довжин штанг. На відміну від традиційних послідовних багатокоординатних систем, в яких погрішності позиціонування по кожній з осей підсумовуються, погрішності МПК можуть взаємно компенсуватися, так що загальна неточність може досягати долі мікрона. Одне з найцікавіших виконань МПК передбачає закріплення робочого інструменту на рухливій платформі. У іншому варіанті рухлива платформа є робочим столом верстата. Обидва ці варіанти показані відповідно на Рис. 3.7 і 3.8.
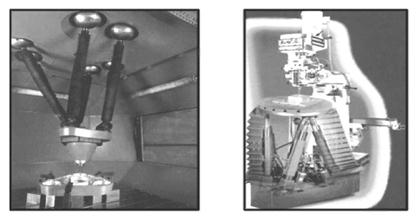
Рис. 3.7. Вигляд знизу на конструкцію Рис. 3.8. Компонування: робочий стілплатформи стенду-імітатора з механізмом типу «гексапод»
Огляд розвитку верстатів з паралельною кінематикою приведений в роботах. Слід зазначити, що якщо у верстатах найбільше поширення отримали триподы, то в устаткуванні для пластичної обробки виявилися ефективніші гексаподы як більше вантажопідйомні, гнучкі і такі, що мають велике число ступенів свободи.
У 2003 р. в Росії був створений перший серійний верстат типу МПК - Гексамех-I (Рис. 3.9). Верстат призначений для обробки виробів складної просторової форми в авіакосмічній, автомобільній, суднобудівельній промисловості. Типові оброблювані вироби: балки, нервюри, лонжерони, панелі, ливарні і мастер-модели, оснащення.
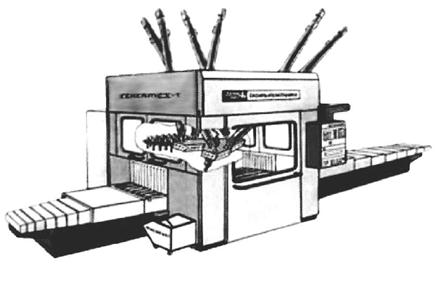
Рис. 3.9. Загальний вигляд гексапода моделі ГЕКСАМБХ-1
Верстат є гексапод з підвішеним на шести штангах електрошпинделем і подовжньо рухливим столом.
Він має високошвидкісний(до 24 000 мін-1) електрошпиндель, який дозволяє виконувати обробку деталей з підвищеною продуктивністю і з високим класом чистоти поверхні. Точність позиціонування - ±0,05 мм. Цифрові приводи подань фірми INDRAMAT з інтерфейсом SERCOS і мультипроцесорна система управління POWER AUTOMATION забезпечують високу динаміку і надійність управління гексаподом. Технічні характеристики переміщення по координатах: по X - 3000 мм, по У - 800 мм, по Z - 700 мм; А - ±30°, В ~ ±25°. Швидкості подань - до 30 м/мін, прискорення - до 10 м/с.
Разом з очевидними перевагами досвід впровадження машин з паралельною і гібридною кінематикою в реальне виробництво виявив ряд актуальних науково-технічних проблем. До них в першу чергу можна віднести наступні питання:
- складність системної інтеграції, необхідність додаткового часу для аналізу і пошуку несправностей;
- велика трудомісткість обслуговування і програмування машини в порівнянні з традиційним устаткуванням;
- складність і неотработанность процедури калібрування машини;
- необхідність знань як в області верстатів з ЧПУ, так і промислових роботів для навчання персоналу методиці програмування;
- неоднорідність(анізотропія) характеристик машини в різних областях робочої зони, наявність особливих конфігурацій.
На ефективність рішення цих завдань, поставлених практикою виробничого застосування, необхідно звернути особливу увагу при створенні машин нового покоління.

