 2015-03-20
2015-03-20 831
831Для выполнения работы используется GUI-интерфейс «SISO-Design Tool» из пакета прикладных программ Control System Toolbox.
Графический интерфейс предназначен для анализа и синтеза одномерных линейных (линеаризованных) систем автоматического управления (SISO - Single Input/Single Output).
В Control System Toolbox имеется тип данных, определяющих динамическую систему в виде набора полюсов, нулей и коэффициента усиления передаточной функции. Синтаксис команды, создающий LTI (Linear Time Invariant)-систему в виде объекта ZPK (zero-pole-gain) c одним входом и одним выходом
ZPK([  ,…,
,…,  ], [
], [  ,…,
,…,  ], K)
], K)
,…, – значения нулей системы,
,…, – значения полюсов системы,
K – коэффициент усиления.
Более естественным является вариант, при котором с помощью функции ZPK создается символьная переменная 's', которая затем используется для определения передаточной функции в виде отношения. Например, после выполнения команд
s = zpk('s');
W1 = (s+0.1)/(s^2)
произойдет создание переменной W1 типа ZPK, определяющей передаточную функцию вида W1=  ;
;
Запуск SISO Design Tool осуществляется командой
>> sisotool
В появившемся окне  для создания схемы динамической системы необходимо использовать вкладки:
для создания схемы динамической системы необходимо использовать вкладки:
· Control Arhitecture- для выбора структурной схемы и вида обратной связи(рис. 7.1)
· System Data - для загрузки данных из рабочего пространства MatLab.
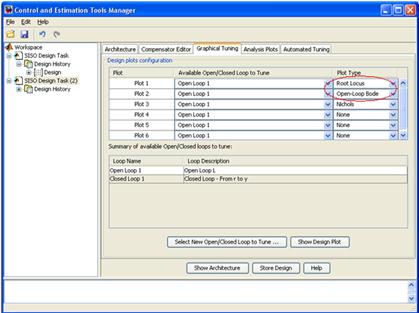
· Grafical Tuning - пункт Root Locus (корневой годограф),Open-Loop Bode, для отображения редактора Root Locus Editor (рис.7.2).
Рис.7.1
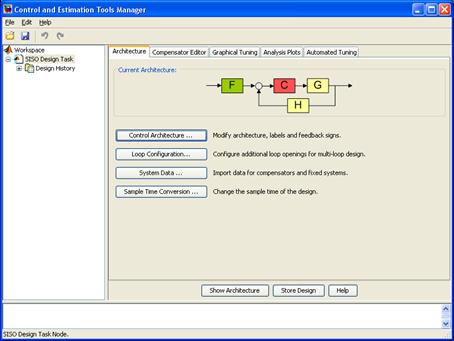
Рис.7.2
Используя Root Locus Editor и значение коэффициента усиления (здесь C – Current Compensator), выполнить задания лабораторной работы.
Двигая красным курсором по КГ до пересечения ветвей с мнимой осью,
можно определить значение коэффициента усиления K кр., при котором система становится неустойчивой. Значение ωкр(критическая угловая частота) соответствует мнимой координате пересечения КГ мнимой оси. Просмотреть это значение можно в нижней части интерфейса или выбрав меню View/Closed Loop Poles.
Таким образом, выполнение лабораторной работы состоит из следующих шагов:
1. Изучите теоретические сведения.
2. Запустите систему MATLAB.
3. Создайте переменные W(1),W(2),W(3) типа ZPK, определяющие, необходимые вам, передаточные функции. Варианты ПФ используйте заданные ранее
4. Запутите SISO Design Tool командой
>> sisotool
5. Выберите соответствующую структурную схему и вид обратной связи.
6. Загрузите данные из рабочего пространства MatLab, используя созданную переменную W(1). Необходимо, чтобы в результате импортирования данных получилась рассматриваемая схема САУ.
7. Выберите во вкладке Tuning пункт Root Locus (корневой годограф),Open-Loop Bode.
8. В соответствии с теорией проанализируйте расположение ветвей корневого годографа.
9. Определите условия неустойчивости замкнутой САУ. Определите K кр и ωкр.
10. Определите значения полюсов, соответствующие 0.5 K кр и 0.25 K кр.
11. Проанализируйте влияние удаленных полюсов и нулей на величины K кр и ωкр.
12. Зафиксируйте полученные графики.
13. Проведите анализ полученных характеристик, сделайте выводы.
14. Ответьте на контрольные вопросы.
15. Оформите отчет.








