2015-04-30
2015-04-30 1457
1457Электромеханические приводы с бесступенчатым регулированием делятся на следящие и шаговые. В состав следящего привода входит регулируемый электродвигатель, который может быть высокомоментным, имеющим возбуждение от высокоэнергетических магнитов, вентильным (синхронным) или асинхронным. Приводы последних типов имеют лучшую механическую характеристику по сравнению с приводом на основе высокомоментного двигателя.
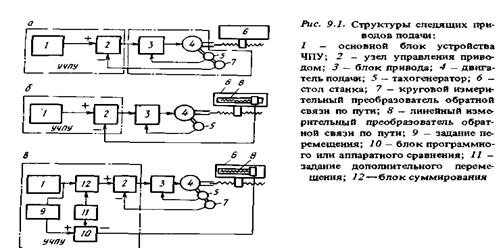
В следящих приводах с полузамкнутым контуром обратной связи (рис. 9.1, а) тахогенератор, выполняющий функцию измерительного преобразователя скорости, устанавливается на вал двигателя подачи (часто встраивается непосредственно в двигатель). Круговой измерительный преобразователь пути устанавливают на ходовой винт или на вал двигателя. В этом случае тяговый механизм привода подачи не охвачен обратной связью, и его погрешности переносятся на обработанную деталь. Такие приводы пригодны для станков нормальной точности.
В следящих приводах с замкнутым контуром обратной связи (рис. 9.1, б) линейный измерительный преобразователь устанавливают на столе станка. Эти приводы характеризуются высокой точностью и пригодны для прецизионных станков. Однако зазоры и упругие деформации в кинематической цепи оказывают влияние на колебания привода.
В следящих приводах с гибридной структурой обратной связи (рис. 9.1 je) круговой измерительный преобразователь обратной связи устанавливают на валу электродвигателя или на ходовом винте. Он обеспечивает позиционирование стола. Линейный измерительный преобразователь помещают на столе и используют для автоматической коррекции погрешностей кинематической цепи привода. Такие приводы применяют в тяжелых станках.
Простой по конструкции шаговый привод подачи находит применение в малых станках. Он хорошо согласуется со средствами вычислительной техники.