 2015-05-10
2015-05-10 251
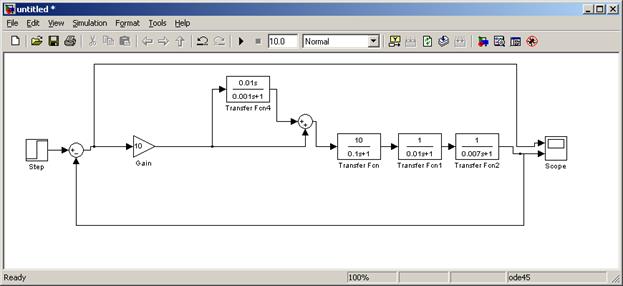
251Использование регулирования по производным от ошибки, позволяет повысить точность системы, поскольку:
1. система начнет чувствовать не просто наличие ошибки, но и тенденцию к ее изменению;
2. повышается запас устойчивости по фазе и можно поднять общий коэффициент усиления
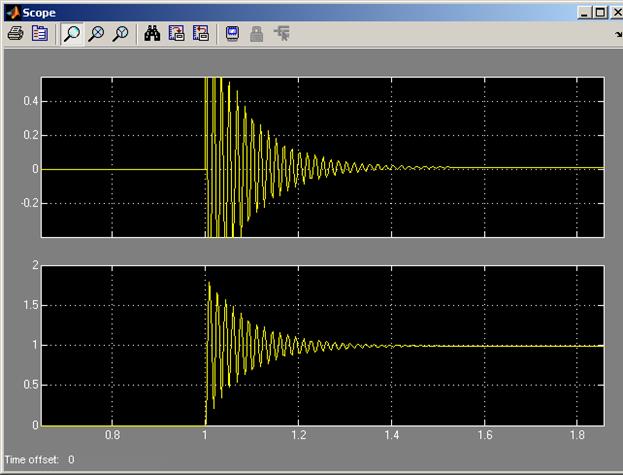
Из графика видно, что t пп=0.1с, х уст(t)=0.01.








