 2015-05-10
2015-05-10 2371
2371Рассмотрим применение пакета Simulink для моделирования различных систем управления и регулирования, которые строятся на основе различных звеньев первого и второго порядка.
Передаточные функции различных звеньев:
Пропорциональное звено:  ;
;
 ;
; ;
;Инерционное (апериодическое) звено 1 – ого порядка:  ;
;
Форсирующее звено: 
Отрицательная и положительная обратная связь:
 , при этом
, при этом 
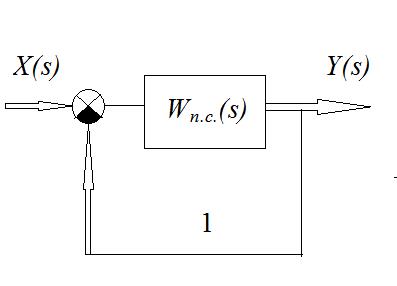
На рис.19 показана структурная схема регулирования объекта по заданному параметру. Основными блоками модели регулирования являются:
Регулятор – устройство, которое осуществляет регулировку параметра по заданному критерию.
Объект- то что необходимо регулировать.
Измерительная система – измеряет регулируемы параметр.

Рис. 19. Линейная математическая модель системы.
В данном случае передаточная функция объекта записывается в следующей форме:
Объект представлен интегрирующим звеном и инерционным первого порядка.
Привод приближенно моделируется как интегрирующее звено, охваченное единичной отрицательной обратной связью, так что его передаточная функция равна
Для измерения необходимых параметров используется датчик, математическая модель которого записывается в виде инерционного звена первого с передаточной функцией
Исследуются переходные процессы в системе при использовании ПИ– регулятора
Данные для моделировании:

На рис. 20 представлена математическая модель данной системы, собранная в Simulinke.
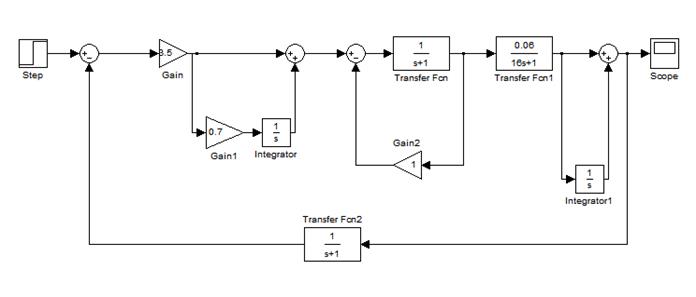 Рис. 20. Математическая модель системы
Рис. 20. Математическая модель системы
На рис. 21 представлена переходная характеристика системы:
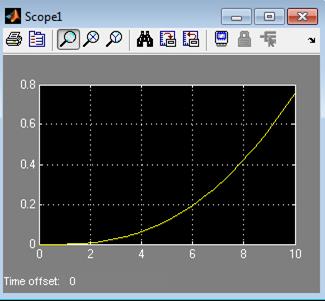
Рис. 21 Переходная характеристика системы
ЗАДАНИЕ:
1. Построить все модели пример 1, пример 2, пример 3. Построить переходные характеристики (реакция системы на единичное ступенчатое воздействие), которые я каждому выдам лично.

