 2015-05-13
2015-05-13 917
917Цепные пильные аппараты, применяемые на лесозаготовительных машинах, оснащаются механизмами надвигания с объёмным гидроприводом различной конструкции. Наиболее распространены два основных типа. В первом типе конструкций механизма надвигания поворот пильного аппарата осуществляется при помощи гидроцилиндра, шарнирно соединённого с кронштейном крепления пильной шины. Такой тип конструкций используется на большинстве харвестерных и процессорных головок, ЗСУ ВТМ и ВПМ и др. Во втором типе конструкций механизма надвигания используется двухпоршневой гидроцилиндр, который при помощи зубчатой рейки и шестерни, расположенной соосно с ведущей звёздочкой, осуществляет поворот кронштейна крепления пильной шины. Зубчатая рейка располагается между поршнями гидроцилиндра, а на шестерне при помощи болтов закрепляется кронштейн крепления пильной шины. Такая конструкция механизма надвигания используется на некоторых модификациях ЗСУ ВТМ и ВПМ.
Для определения основных размерных параметров механизма надвигания пильного аппарата вначале составляется компоновочно-кинематическая схема. На рис. 3.6 представлена компоновочная схема механизма надвигания второго типа конструкции с использованием для поворота пильного аппарата двухпоршневого гидроцилиндра и механической передачи зубчатая рейка-шестерня.
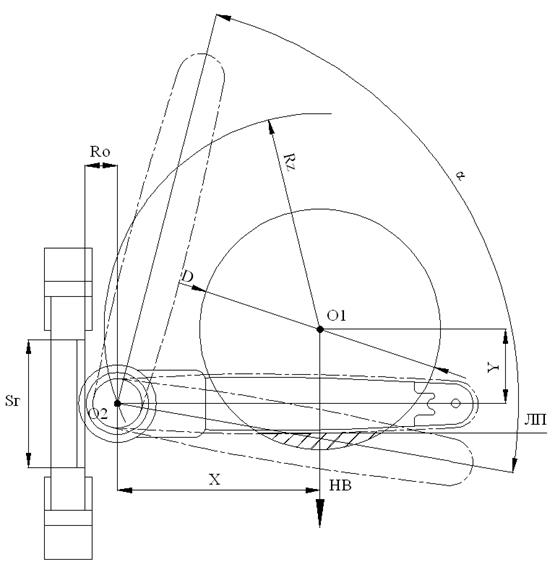
Рис. 3.6. Компоновочно-кинематическая схема механизма надвигания
Составление кинематической схемы механизма надвигания пильного аппарата начинается с определения взаимного расположения центра поперечного сечения дерева в месте спиливания (т. О1) и центра поворота пильной шины (т. О2), соосно с которым также расположена ведущая звёздочка пильного аппарата. Расстояние между центрами О1 и О2 можно определить из выражения
 (3.32)
(3.32)
где ΔZ – зазор между кронштейном крепления пильной шины поверхность спиливаемого дерева, (ΔZ = 20…30 мм).
При выборе места расположения центра поворота пильной шины необходимо
При проектировании и расчёте механизма надвигания цепного пильного аппарата необходимо установить место расположения оси поворота пильной шины относительно распиливаемого лесоматериала, определить кинематические параметры пиления и силы, действующие на механизм надвигания. Кинематическая схема механизма резания с цепной пилой представлена на рис. 3.6.
Для выбора координат места расположения оси вращения пильной шины (оси ведущей звёздочки) задаются значением Y, после чего определяют координату Х по формуле
 , м, (3.32)
, м, (3.32)
где e – отклонение траектории пиления от оси пильной шины, равное для симметричных пильных шин e=BШ /2, а для криволинейных пильных шин отклонение определяется с учётом принятой кривизны, м;
m1 – минимальное расстояние от оси вращения ведущей звёздочки до начала рабочей зоны пильной шины, определяемое по формуле
 , м.
, м.
должен обеспечивать нахождение распиливаемого лесоматериала в пропиливаемой зоне. Для определения оси вращения необходимо Это условие выражается уравнениями
 , (3.33)
, (3.33)
как на стационарных, так и на самоходных лесозаготовительных машинах производится








