 2015-05-13
2015-05-13 5870
5870В реальных системах автоматики сигналы от элементов, как правило, бывают непостоянными. В большинстве случаев они меняются во времени. Для элементов, составляющих системы автоматики, основным режимом работы является режим, при котором входная и выходная величины не остаются постоянными. Такой режим называется динамическим.
Для оценки работы элемента в динамическом режиме используются динамические характеристики и параметры.
Процесс перехода элемента из одного установившегося состояния в другое называют переходным процессом. Так как во время переходного процесса Y изменяется, то переходный процесс, следовательно, является частным случаем динамического режима.
Переходный процесс характеризуется переходной характеристикой. Под переходной характеристикой понимают зависимость выходной величины от времени Y = f(t) при скачкообразном изменении входной величины. Реакция большинства элементов на скачкообразный входной сигнал (рис. 5.3, а), т. е. их переходная характеристика (рис. 5.3, б), представляет собой нарастающую экспоненту.
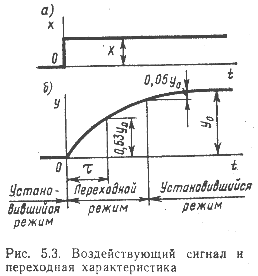 Время от начала экспоненциального изменения выходной величины до момента, когда она достигает 63% (2/з) установившегося значения выходной величины, называется постоянной времени элемента τ.
Время от начала экспоненциального изменения выходной величины до момента, когда она достигает 63% (2/з) установившегося значения выходной величины, называется постоянной времени элемента τ.
Чем меньше τ, тем круче будет переходная характеристика, тем меньше длительность переходного процесса и тем меньше инерционность элемента. Динамические свойства элемента принято оценивать по его реакции на скачкообразное изменение входного сигнала. При этом переходный процесс, называемый переходной характеристикой, определяется только свойствами элемента. До подачи скачкообразного сигнала на вход элемент находится в одном установившемся состоянии (режиме), после подачи скачка и окончания* изменений выходной величины элемент будет находиться в другом установившемся состоянии. Таким образом, переходная характеристика позволяет выявить и оценить инерционность элемента.
Разные по функциональному назначению элементы имеют неодинаковые динамические свойства, обусловленные разной инерционностью элементов, которая проявляется в том, что изменение выходной величины не повторяет мгновенно изменений входной величины, а происходит с некоторым запаздыванием во времени. Например, при скачкообразном изменении входной величины X за счет инерционности элемента его выходная величина Y достигнет нового установившегося значения не сразу, а только после окончания переходного процесса.
Кривая зависимости Y=f (t)при скачкообразном изменении входного сигнала является графической интерпретацией решения дифференциального уравнения элемента, которым описывается поведение элемента при переходном процессе, где входные и выходные сигналы являются функциями времени.
Различные элементы автоматики имеют различные графики переходных процессов (рис. 5.4), так как поведение элементов при воздействии на них скачкообразных входных сигналов описывается различными дифференциальными уравнениями.
На рис. 5.4, а показан переходный процесс без запаздывания, на рис. 5.4, б — переходный процесс элементов, обладающих инерцией. Степень инерционности подобных элементов оценивается постоянной времени т. Это время определяется расстоянием по оси абсцисс от начала координат
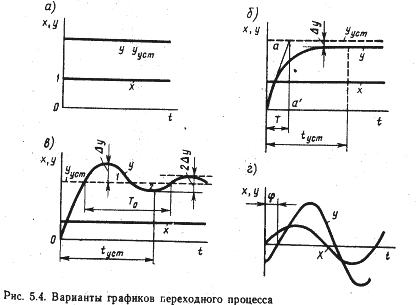
до точки пересечения а касательной к кривой переходного процесса в начале координат с установившимся значением выходного сигнала Y уст. На рис. 5.4, в показан колебательно-затухающий переходный процесс, цри котором выходная величина колеблется около ее установившегося значения Y уст с постоянной частотой f о=1/τо, где τо —период колебаний с непрерывно убывающей амплитудой. Время t уст в течение которого выходной сигнал достигает значения, отличающегося на Δ Y от установившегося значения выходной величины Y, называется длительностью переходного процесса. Переходный процесс, показанный на рис. 5.4, в, называется периодическим в отличие от апериодического переходного процесса, показанного на рис. 5.4, б. Выходной сигнал, показанный на рис. 5.4, г, изменяется периодически, при этом выходной сигнал Y сдвинут по фазе на угол φ.
В любой произвольный момент времени кривые X и Y имеют разность ординат. Эта разность называется динамической погрешностью элемента. У большинства элементов абсолютная динамическая погрешность после скачкообразного воздействия с течением времени не остается постоянной, а стремится к постоянному достаточно малому установившемуся значению.
Как установить закономерность динамического режима работы элементов и описать математически характеристику переходного процесса? Метод анализа переходного процесса целесообразно рассмотреть на наиболее часто встречающихся элементах, которые описываются дифференциальным уравнением вида
 (5.1)
(5.1)
где τ — постоянная времени; К — коэффициент пропорциональности; х — величина входного сигнала.
В установившемся режиме Y = const и, следовательно, dY/dX=0.
С учетом этого из (5.1) получим уравнение статической характеристики такого элемента
Y = К ' х. (5.2)
Пусть в момент времени t =0 входная величина изменилась скачкообразно от Х=0 до Х=Х, где Х — величина входного скачкообразного сигнала (см. рис. 5.3). При Х =0 и Х=Х из уравнения (5.2) получаем, что установившееся значение выходной величины до подачи скачкообразного сигнала было Y =0, а после подачи должно быть
 . (5.3)
. (5.3)
При t >0 X = x =const. С учетом уравнения (5.3) разделим переменные dY /(Y — Y 0) = - dt / τ. Проинтегрируем данное выражение
ln (Y — Y 0) —In С = - dt / τ или
 (5.4)
(5.4)
где С — постоянная интегрирования, определяемая из начальных условий, т. е. при t = 0 и
Y =0. Подставив эти значения t и Y в (5.4), найдем C = - Y 0. Тогда выражение (5.4) примет вид
 . (5.5)
. (5.5)
Уравнение (5.5) — уравнение нарастающей, экспоненты и есть уравнение переходной характеристики для элементов, описываемых' дифференциальным уравнением вида (5.1).

