2015-05-30
2015-05-30 901
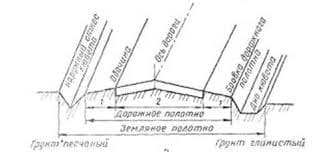
901Навигационные параметры можно измерить с помощью приборов имеющихся на корабле.
Пеленг на ориентир снимается с помощью пеленгатора МК или ГК, а также с помощью РЛС.
Высота и азимут светил с помощью секстана.
Глубина с помощью эхолота.
Расстояния до береговых ориентиров измеряются главным образом с помощью навигационных радиолокационных станций.
Навигационные РЛС обеспечивают измерение пеленгов и расстояний до ориентиров независимо от визуальной видимости.
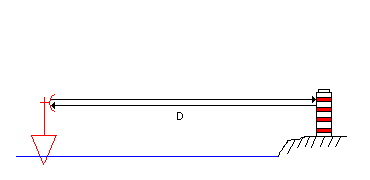
Принцип измерения расстояний с помощью РЛС основан на измерении времени движения радиолокационного импульса от антенны радиолокатора до ориентира и обратно:
D = ct/2, (1)
где с – скорость распространения радиолокационного импульса (= 300.000км/с);
t – время движения импульса от антенны до ориентира и обратно;
D – дистанция до ориентира (Рис.1)
Рис.1
Максимальная дальность действия навигационной РЛС – наибольшее расстояние, на котором возможно обнаружение объектов, рассчитывается по формуле (2):
Dp = 2,4 (√ На + √ h) где, (2)
На – высота антенны РЛС над уровнем моря.
h – высота ориентира над уровнем моря.
В зависимости от высоты объекта наблюдения, его отражающей способности, технических характеристик РЛС и метеорологических условий береговые ориентиры наблюдаются на расстояниях до 65 миль.
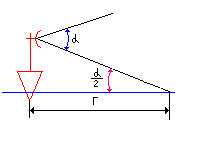
Минимальная дальность действия (мертвая зона) навигационной РЛС (Рис.24) – наименьшее расстояние, на котором объекты еще могут быть обнаружены. Она зависит как от технических характеристик РЛС (длительность импульса, скорость срабатывания антенного переключателя), так и от высоты антенны ее диаграммы направленности по вертикали.
В пределах мертвой зоны малые объекты (бочки, катера, топляки, вехи) могут быть не обнаружены.
Рис.2
Если антенна навигационной РЛС расположена ниже некоторых надстроек (трубы, мачты) и антенн других РЛС, возможно наличие «теневых» секторов (Рис.3). Поэтому наравне с радиолокационным должно вестись круговое визуальное наблюдение.
Рис.3
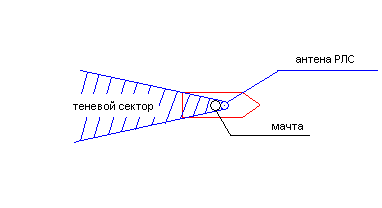
Особенно важное выполнение этого требования при плавании вблизи берега в условиях плохой видимости и ночью. Кроме того, необходимо периодически измерять курс «просматривать» горизонт в «теневых» секторах.
На экране индикаторов РЛС может наблюдаться засветка от волн (на расстоянии до 4 миль), облаков, дождя или снега. Для уменьшения этих помех рекомендуется уменьшать усиление приемника. Засветку от облаков и осадков можно опознать по ее быстроменяющейся форме и большой скорости перемещения.
Время приведения станции в готовность к работе 2-5 мин. Время непрерывной работы до 24м.
Для уменьшения погрешностей измерений рекомендуется следующее:
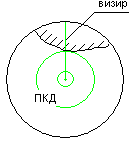
· использовать подвижный круг дальности (ПКД) приемом «касания» к отметке объекта на экране РЛС. Толщина ПКД должна быть минимальной. Визир устанавливать на середину отметки (Рис.4).
Рис.4
· выбирать для наблюдений точечные ориентиры (такие отметки от которых на экране высвечиваются точкой или небольшим пятном) или выступающую в сторону корабля часть береговой черты (мыс, мол).
Наиболее сложным в навигационном использовании РЛС является чтение изображения на экране индикатора при подходе к незнакомому берегу.
При опознании ориентиров необходимо учитывать следующее:
· На экране индикатора РЛС появляются отметки только от тех ориентиров, которые находятся над радиолокационным горизонтом.
· Контур низкого берега отображается слабо с разрывами и искажениями. Линия уреза воды фактически может оказаться значительно ближе, чем засвеченная на экране кромка, если радиоимпульс отражен от более удаленной возвышенной части берега.
· Отметки от высоких и объемных сооружений на берегу (элеваторы, башни, холодильники, портальные краны и т.п.) могут появиться на экране индикатора в виде отдельных отметок раньше, чем изображение береговой черты.
· За высокими строениями и возвышенностями берега образуется зона «тени», в которой отметки от объектов не наблюдается.
· В общем случае изображение обрывистого берега на экране индикатора навигационный РЛС на расстоянии 10-15 миль примерно соответствует изображению его на карте.
Измеренные расстояния, радиолокационные пеленги исправляются поправками, которые определяются при калибровке РЛС на полигоне или выбираются из формуляра РЛС.
D = Dp + ΔDp (3)
Dp – измеренное с помощью РЛС расстояние;
ΔDp – поправка к измеренному расстоянию;