 2015-06-05
2015-06-05 869
869на элементарные события, происходящие в физической и психической ре-
альности: это были соответственно простой физический раздражитель и
ощущение. Первый вопрос, который интересовал Фехнера, — это пробле-
ма порогов чувствительности. Возможности наших органов чувств ограни-
чены: мы можем разговаривать на расстоянии 5, 10, 20 метров, но если наш
собеседник удалится от нас на расстояние 5 километров, то разговор без
применения специальных средств усиления звука станет невозможным.
Значит (разумно предположить), как считали Фехнер и его последовате-
ли, весь диапазон физической интенсивности стимулов любого типа (будь
то свет, звук, вкус, запах, прикосновение) можно разделить на те, которые
ощущаются, и те, которые не ощущаются.
Выделяют два типа порогов чувствительности: абсолютный и дифферен-
циальный, или разностный. Между ними есть различия, но оба понятия
отражают убеждение в существовании пределов сенсорной системы.
Абсолютный порог чувствительности — это такая величина стимула
(физического раздражителя), ниже которой ощущения от стимула не воз-
никает, а выше — возникает. Обратимся к рис. 2.1. Все стимулы, которые
больше (сильнее, громче, ярче) определенной интенсивности раздражите-
ля, вызывают ощущения (правая часть диапазона). Стоит же нам несколько
уменьшить величину стимула (сдвинуть его в левую часть диапазона), как
мы перестаем его ощущать.
Дети похожи на родителей. Иногда мы не можем отличить голос сына
от голоса отца, во всяком случае, в первые секунды телефонного разгово-
ра. Нам трудно настроить гитару: подстраивая одну струну к другой, мы не
слышим разницы в звучании. Но наш товарищ с консерваторским обра-
зованием говорит, что нужно еще подтянуть на четверть тона. Следователь-
но, есть такая величина физического различия между стимулами, больше
которой мы их различаем, а меньше которой — нет. Эта величина носит
название дифференциального порога, или порога дифференциальной чув-
ствительности.
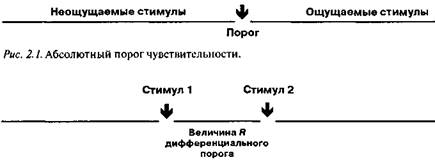 |
| Рис. 2.2. Дифференциальный порог. |
Обратимся к рис. 2.2. Если мы уменьшим физическую разницу между
стимулами, то различие между ними перестанет ощущаться. Стоит слегка
Психофизика ощущений
«развести» стимулы по физической интенсивности, как ощущение разли-
чия появится.
Несмотря на то, что абсолютный и дифференциальный пороги пред-
ставляют собой явно различные характеристики сенсорной системы, затем
и за другим понятием стоит общий методологический принцип или одно
и то же допущение. Предполагается, что сенсорный ряд — диапазон наших
ощущений — прерывен (дискретен): ощущение может исчезнуть даже при
наличии физического воздействия. До определенных пределов ощущение
есть, а потом пропадает, как свет, когда щелкнули выключателем. Эта точка
зрения распространяется как на абсолютный порог, так и на дифферен-
циальный: уменьшаем-уменьшаем интенсивность— «шелк», и ощущения
нет (абсолютный порог), уменьшаем-уменьшаем разницу между стимула-
ми — «щелк», и ощущение различия исчезло (дифференциальный порог),
хотя физически стимулы не идентичны.
Представление о том, что наша сенсорная система устроена по поро-
говому, прерывному принципу, называется концепцией дискретности
(прерывности) сенсорного ряда. Казалось бы, вполне разумная идея. О чем
тут спорить?! Оказывается, есть о чем. Психофизики, воодушевленные иде-
ей «абсолютного нуля», или точки исчезновения ощущений, провели сот-
ни экспериментов в надежде найти и рази навсегда определить пороги чув-
ствительности. Не тут-то было. Помещают испытуемого в специальную,
изолированную от всяческих шумов экспериментальную комнату, измеря-
ют его пороги и в первый раз получают одно значение, а во второй — дру-
гое. Это похоже на ситуацию, когда дверь в квартире открывается то с двух
с половиной оборотов, то с двух, то с полутора, то вообще с одного, а за-
мок тот же, и закрываете вы его все время ровно на два оборота. Нам ка-
залось, что вероятность открыть дверь с одного и полутора оборотов рав-
на нулю, а открыть с двух — единице.
Порог как бы плавает. Каждый раз мы получаем несколько различные
значения. Иными словами, даже для очень слабых раздражителей суще-
ствует некоторая (ненулевая) вероятность их обнаружения, а для относи-
тельно сильных — ненулевая вероятность их необнаружения. Зависи-
мость вероятности обнаружения (различения) стимулов от их интенсив-
ности называется психометрической функцией. Как должна выглядеть
психометрическая функция, если сенсорная система работает по дискрет-
ному принципу? До определенного уровня интенсивности стимула веро-
ятность обнаружения равна нулю, потом — единице. А как она выглядит в
действительности? Вероятность обнаружения сигнала по мере роста его
интенсивности не изменяется скачкообразно, а растет постепенно. Осно-
вываясь на результатах психофизических исследований, один из оппонен-
тов Фехнера Мюллер высказал идею о непрерывности сенсорного ряда,
суть которой состоит в том, что не существует порога как такового: любой
стимул может в принципе вызвать ощущение. Почему же мы не обнару-
живаем некоторые слабые сигналы? Потому, утверждал Мюллер, что на
возможность обнаружения стимула влияет не только его физическая ин-
тенсивность, но и расположенность сенсорной системы к ощущению. Эта
Глава 2. Ощущение
расположенность зависит от множества случайных, плохо контролируемых
факторов: усталости наблюдателя, степени его внимательности, мотивации,
опыта и т. п. Одни факторы благоприятно действуют на способность наблю-
дателя к обнаружению сигнала (например, большой опыт), а другие — не-
благоприятно (например, усталость). Соответственно, неблагоприятные
факторы уменьшают способность к обнаружению, а благоприятные — уве-
личивают. Но в целом, по мнению Мюллера, нет оснований говорить
о существовании какой-то особой точки на оси ощущений, где они пре-
рываются, исчезают. Сенсорный ряд непрерывен. Если бы мы могли со-
здать идеальные условия наблюдения, то сенсорная система восприняла бы
сколь угодно малый сигнал.
Со времени этой научной дискуссии между Фехнером и Мюллером про-
шло уже более ста лет, но проблема дискретности-непрерывности сенсор-
ного ряда до сих пор не получила окончательного решения. Видимо, это
один из тех вечных споров, который сродни спору о бессмертии души.
Дело не столько в результатах спора, сколько в его побочных продук-
тах. Исходные психофизические идеи вдохновили многих исследователей
и позволили им создать множество психофизических концепций, интерес-
ных в теоретическом плане и полезных в практическом. Ниже мы корот-
ко рассмотрим наиболее характерные из них.
Стивене, Морган и Фолькман (цит. по: [Бардин, 1976]) в 1941 г. сформу-
лировали нейроквантовую теорию, основное допущение которой состоит в
том, что единицами нервной системы являются нервные кванты, каждый
квант срабатывает по принципу «все или ничего», т.е. срабатывает, когда до-
стигнут его порог, и не срабатывает, когда величина возбуждения ниже по-
рогового уровня. Однако для возникновения ощущения, по мнению авторов
теории, недостаточно возбуждения одного кванта. Ощущение возникает толь-
ко при возбуждении двух нервных квантов. Кроме того, чувствительность
организма флуктуирует (изменяется во времени, колеблется) совершенно слу-
чайным образом. Эти и другие (достаточно произвольные, впрочем) допуще-
ния позволили объяснить некоторые особенности психометрических функ-
ций и защитить идею дискретности сенсорного ряда, невзирая на отсутствие
в экспериментальных данных психофизиков скачкообразного перехода от не-
обнаружения к обнаружению или от неразличения к различению. Следует,
однако, отметить, что введение понятия «нервный квант» было малообосно-
ванным: за ним не стояло четких эмпирических данных, оно не имело ясно-
го психофизиологического значения, и поэтому само допущение о существо-
вании нервных квантов воспринимается не без сомнений.
Весьма продуктивной оказалась концепция, получившая название тео-
рии обнаружения сигнала, которая была предложена Грином и Светсом в
1966 г. Суть теории сводится к следующему. Любой сигнал воспринимает-
ся на фоне шума. Даже если полностью отсутствуют внешние помехи, то
сама сенсорная система (просто за счет своей работы) создает некоторый
шум: в нас бьется сердце, по жилам течет кровь, мы дышим и т. д. Этот шум
при жизни наблюдателя нельзя отключить (во всяком случае, он вряд ли
на это согласится). Поэтому, хотя, по-видимому, сенсорная система рабо-
Психофизика ощущений
тает по непрерывному принципу, все равно обнаружение сигнала — веро-
ятностный процесс. Сигнал сливается с шумом, он становится плохо от-
личимым от него, особенно, когда физическая интенсивность самого сиг-
нала очень мала. Наблюдатель, по сути дела, выполняет задачу отличения
сигнала от шума. Шум, как ветер, колеблется вокруг некоторого среднего
значения: он может быть совсем слабым (и тут можно с высокой степенью
уверенности сказать, что сигнала не было), а может усиливаться, и в этом
случае шум легко перепутать с сигналом. Представьте себе, что вы видите
человека идущего по палубе теплохода во время сильной бортовой качки.
Ваша задача, не подходя к нему на близкое расстояние, определить, трезв
он или пьян. Человек качается. Это заметно. Но отчего? От качки или от
того, что он не очень трезв? Чем лучше ваши зрение и наблюдательность,
тем быстрее вы придете к правильному ответу, сравнив, например его ам-
плитуду колебаний с вашей собственной, выделив его колебания из пока-
чиваний судна и т.д. Но есть еще другие факторы, которые вы невольно
используете при обнаружении пьяного на судне: вы знаете, например, на-
сколько часто бывают такие случаи среди экипажей судов, насколько строг
запрет на употребление спиртного в море и серьезна кара за его наруше-
ние. При одной и той же сенсорной информации можно сделать противо-
положные выводы. Предположим, что запреты строги и судно на хорошем
счету. Вывод: «Да нет, вряд ли пьяный. Здесь с этим строго». Противопо-
ложная ситуация: вы знаете, что в последнее время дисциплина хромает,
начальство смотрит на нарушение правил сквозь пальцы. Вывод: «Пьяный,
что ли. Наверно, пьяный. Распустились в последнее время!»
Нечто подобное происходит и при обнаружении самых простых сигна-
лов. С одной стороны, на правильность ответа о наличии сигнала влияют
собственно сенсорные способности ваших анализаторов (слуха, зрения и
т.д.), с другой — существует и несенсорный компонент, компонент при-
нятия решения. Основными факторами принятия решения являются ве-
роятности сигналов и то значение, которое имеют для вас правильные от-
веты и ошибки обнаружения. Если вы знаете, что в этом водоеме много
рыбы (высокая вероятность сигнала), то будете хвататься за удочку при
любом движении поплавка. Если вы летчик, на экране вам привиделось
нечто подозрительное, а боеприпасы на исходе, то вы будете очень осто-
рожны с признанием непонятного объекта вражеским самолетом, посколь-
ку цена ошибки ложной тревоги очень высока.
Рассмотрим ситуацию в более полном виде. Возьмем в качестве примера
контроль за качеством продукции. Сигналом для контролера является бра-
кованное изделие. Не сигналом (шумом) — качественное изделие. Изделий
много. Контролер один. Он может ошибаться. Посмотрим, какие возмож-
ны варианты сочетаний ответов наблюдателя и истинного положения вещей.
Эти сочетания называются исходами процесса обнаружения. Контролер
может в принципе дать два типа правильных ответов: оценить качественное
изделие как качественное, бракованное — как бракованное; а также два типа
неправильных: посчитать бракованное качественным и, наоборот, каче-
ственное бракованным. Возможные исходы показаны рис. 2.3.
Глава 2. Ощущение
| Ответ «Брак» | Ответ «Нет брака» | |
| Бракованное изделие (сигнал) | Правильное обнаружение (попадание) | Пропуск сигнала |
| Качественное изделие (шум) | Ложная тревога | Правильное отрицание (покой) |
Рис. 2.3. Исходы процесса обнаружения сигнала.
Если отличить бракованное изделие от качественного не просто, если
брак плохо отличим от качественных изделий в силу, например, погреш-
ностей измерительной аппаратуры, дефицита времени или усталости
контролера, то задача становится пороговой. Другими словами, разли-
чие между физическими событиями настолько незначительно, что это
создает проблемы для сенсорной системы: сигнал сливается с шумом,
и для того, чтобы отличить одно от другого приходится привлекать не-
которые дополнительные (помимо сенсорных) механизмы. Это, как ука-
зывалось выше, механизмы принятия решения. Если при прочих рав-
ных условиях вероятность брака велика (цех имеет плохую репутацию),
то наблюдатель при возникновении сомнений будет относительно бо-
лее склонен отвечать «сигнал». И наоборот, если вероятность брака мала
(исполнители исключительно добросовестны), то предпочитаемым от-
ветом будет «нет брака». Сходным образом обстоит дело со значимос-
тями, или ценностями исходов. Если, например, за обнаруженный после
контроля брак с контролера снимают премию (и приличную), то он бу-
дет очень придирчив. Если же начальник внушает контролеру, что глав-
ное количество, пусть даже изделия будут слегка некондиционными, то
контролер будет выносить вердикт «брак» с очень большой осторожно-
стью. Соответственно уменьшится процент правильных обнаружений и
ложных тревог.
Одной из главных заслуг авторов теории обнаружения сигнала являет-
ся введение в структуру сенсорного процесса составляющей принятия ре-
шения. Это, с одной стороны, позволило взглянуть на проблемы ощуще-
ний с более высоких системных позиций, а с другой — выработать подход
к решению многих прикладных проблем — первоначально чисто военной
тематики (работа на радарах и сонарах), а потом и гражданской (контроль
качества продукции, процессы восприятия человека человеком и др.).
Исходной позицией теории двух состояний Люса (1960, 1963) является
допущение о дискретности сенсорного ряда. И в этом ее отличие от тео-
рии обнаружения сигнала. Роднит же две теории признание наличия вне-
сенсорных факторов обнаружения и различения сигналов, а также призна-
ние существования неопределенности, связанной с работой самой сенсор-
ной системы.
Люс полагал, что существует некоторое критическое значение раздра-
жителя, ниже которого ощущение не возникает. Однако даже при отсут-
Психофизика ощущений
ствии раздражителя вероятность превышения порога выше нуля. Верно
и обратное: при наличии раздражителя итоговое влияние может не дос-
тигнуть порога. Таким образом, действие раздражителя может вызвать
одно из двух состояний: либо обнаружение, либо необнаружение. Как
видно, эти последние допущения весьма сходны с основными допуще-
ниями теории обнаружения. Но это еще не все. Ответ наблюдателя оп-
ределяется не только этими двумя состояниями. Существует независимый
механизм угадывания как выход из ситуации неопределенности, связан-
ной с наличием двух возможных состояний. За счет механизма угадыва-
ния человек может дать положительный ответ на допороговый сигнал, т.е.
в состоянии необнаружения. И наоборот, за счет того же механизма на-
блюдатель может дать отрицательный ответ в случае состояния обна-
ружения.
Л юс считал, что человек при обнаружении сигнала следует одной из трех
основных стратегий:
• Стратегии риска, которая вызвана стремлением увеличить число об-
наружений (например, когда важно не пропустить сигнал). Такая стра-
тегия, естественно, приводит к тому, что наблюдатель (например, опе-
ратор радарной установки) обнаруживает относительно больше целей,
но в то же время в его ответах растет количество ложных тревог. Эта
стратегия хороша только тогда, когда нас не смущают затраты, связан-
ные с ложными тревогами (например, напрасный расход боеприпа-
сов, топлива и т. п.), и цена пропуска цели очень велика (например,
когда противник представляет собой большую опасность).
• Стратегии осторожности, связанной со стремлением наблюдателя
«напрасно не беспокоиться», что выражается в полном или частичном
отказе от угадывания, в избегании ложных тревог. Это иногда приво-
дит даже к отрицательным ответам в состоянии обнаружения.
• Стратегии следования сенсорным впечатлениям, суть которой состоит
в том, что наблюдатель пытается не принимать во внимание ничего,
кроме самих сенсорных впечатлений, быть, что называется, непред-
взятым.
Таким образом, Люс лишь несколько иначе описывает сенсорную со-
ставляющую процесса обнаружения. В остальном же (в плане подхода к
вненсенсорпым составляющим) его взгляд сродни взглядам авторов тео-
рии обнаружения.








