 2015-06-26
2015-06-26 1679
1679Призначення привода штангового свердловинного насоса подвійне: з одного боку він перетворює механічну енергію двигуна в енергію колони насосних штанг, із другого – створює оптимальний режим роботи привідного двигуна.
Привід забезпечує дві основних функції:
– створює рух точки підвісу штанг за визначеним законом, регулює режим відкачування пластової рідини за рахунок зміни довжини і частоти ходу точки підвісу штанг, пуск та зупинення установки, контроль режиму роботи внутрісвердловинного устаткування;
– дає змогу використовувати двигуни мінімальної потужності, на режим навантаження яких закономірність зміни зовнішнього навантаження впливає мінімально.
Приводами штангового свердловинного насоса є верстати-качалки різних конструкцій.
Силовий орган верстата-качалки (скорочено – ВК) призначений для переміщення колони штанг і може бути механічним, що складається із системи важелів, канатів та блоків, гідравлічним чи пневматичним – із використанням гідравлічного чи пневматичного циліндрів.
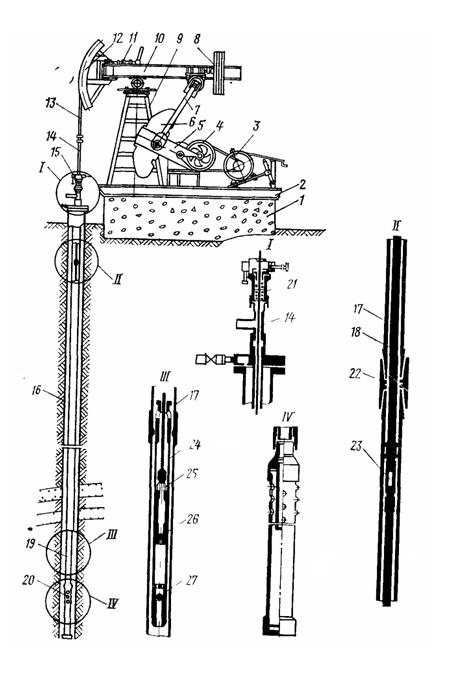
Рисунок 1.5.5 – Штангова свердловинна насосна установка
Привід оснащений двигуном (електромотор, гідромотор чи двигун внутрішнього згоряння) й передавальним механізмом, що може бути механічим чи гідравлічним. Ці два блоки в основному забезпечують виконання першої функції привода, виконання другої забезпечується пристроєм, що врівноважує, який накопичує потенційну енергію колони штанг при ході вниз і віддає при ході штанг нагору.
Досконалість конструкцій привода ШСН оцінюється ступенем впливу зміни навантаження в точці підвісу штанг на характер навантаження привідного двигуна. Ідеальною конструкцією установки можна вважати ту, яка в будь-який момент часу подвійного ходу буде забезпечувати постійне і мінімально можливе навантаження на двигун.
Потенційна енергія штанг може накопичуватися за рахунок підняття вантажу або іншої колони насосних штанг на визначену висоту, стискання газу в пневматичному акумуляторі, обертання маховика, швидкість якого збільшується і т.д. При використанні врівноважуючих пристроїв, що працюють з перерахованими накопичувачами потенційної енергії, їх називають: вантажними (гравітаційними), груповими, пневматичними чи інерційними.
Класифікація приводів ШСН за їхніми параметрами умовна, тому що в міру розвитку техніки для видобутку нафти такі поняття, як довгоходові чи потужні приводи, змінюють свій зміст. На сьогодні прийнятий наступний розподіл приводів свердловинних штангових насосів:
За максимальним навантаженням в точці підвісу штанг Ртах, тобто за сумою максимальних статичних, динамічних і інерційних навантажень у точці підвісу штанг, розрізняються на
легкі................. Ртах < 30 кН;
середні............. Ртах < 100 кН;
важкі................. Ртах > 100 кН.
За довжиною ходу точки підвісу штанг. Відомі конструкції приводів, що забезпечують довжину ходу точки підвісу штанг від 0,3 до 12 м при плавному чи східчастому регулюванні від мінімальної довжини до максимальної.
За максимальною довжиною приводи поділяють на:
короткоходові.......... Smax < 1 м;
середньоходові...... 1 м < Smax < 3 м;
довгоходові.......... 3 м < Smax < 6 м;
понадовгоходові....... Smax > 6 м.
За частотою ходів точки підвісу штанг приводи поділяють:
тихохідні...............nmax < 6 хв-1;
середні................6 < nmax < 15 хв-1;
швидкохідні...............nmax > 15 хв-1.
За величиною споживаної потужності класифікація приводів також умовна. Вона побічно характеризує роботу, виконувану установкою за одиницю часу. Прийнято приводи розділяти на такі групи:
малопотужні N < 5 кВт;
середньої потужності 5 < N < 25 кВт;
потужні 25 < N < 100 кВт;
надпотужні N > 100 кВт
Найбільше поширення як у вітчизняній, так і закордонній нафтовидобувній промисловості дістали механічні приводи свердловинного насоса. Їхньою особливістю є використання механічного перетворювача, що служить для перетворення обертального руху вала привідного двигуна в зворотно-поступальний рух точки підвісу штанг, а також застосування механічної трансмісії. Крім того, для них характерне використання механічного зв'язку пристрою, що врівноважує, із силовим органом, що забезпечує переміщення точки підвісу штанг.
Відомі індивідуальні механічні приводи і групові приводи для експлуатації декількох свердловин.
Приводи першого типу (рисунок 1.5.6) містять двигун, трансмісію та перетворюючий механізм і забезпечують рух тільки однієї колони насосних штанг. Нині майже всі приводи ШСН належать до цього типу.
Рисунок 1.5.6 – Кінематична схема привода двоплічного балансирного верстата-качалки
Приводи другого типу служать для експлуатації групи (від 2 до 40) свердловин, розташованих близько один до одного.
Верстати-качалки з двоплічним балансиром виконуються за кінематичною схемою, наведеною на рисунках 1.6 та 1.7. При цьому опора балансира знаходиться між точками підвісу штанг і з’єднання балансира із шатуном.
Зусилля до балансира можуть передаватися декількома способами. Найбільш часто для цього використовуються два шатуни, з'єднані з балансиром траверсою.
Існують різні способи зрівноважування двоплічних балансирних верстатів-качалок (рисунок 1.5.7).
Рисунок 1.5.7 – Способи механічного зрівноважування двоплічних балансирних верстатів-качалок:
а – балансирне зрівноважування; б – кривошипне (роторне) зрівноважування, в – комбіноване зрівноважування; г – зрівноважування за допомогою помилкової качалки; д – зрівноважування противагою обертовим з подвійною частотою, е – шатунне зрівноважування








